Automated vehicles [2022] EWLC 404 (January 2022)
BAILII is celebrating 24 years of free online access to the law! Would you
consider making a contribution?
No donation is too small. If every visitor before 31 December gives just £5, it
will have a significant impact on BAILII's ability to continue providing free
access to the law.
Thank you very much for your support!
[New search]
[Printable PDF version]
[Help]
Law Commission
Reforming the law
Automated Vehicles: joint report
HC 1068
SG/2022/15
Law
Commission
Reforming the law
Law Commission of England and Wales
Law Commission No 404
Scottish Law Commission
Scottish Law Commission No 258
Automated Vehicles:
joint report
Presented to Parliament pursuant to section 3(2) of the Law Commissions Act 1965
Laid before the Scottish Parliament by the Scottish Ministers
Ordered by the House of Commons to be printed on 25 January 2022
HC 1068
© Crown copyright 2022
This publication is licensed under the terms of the Open Government Licence v3.0 except where otherwise stated. To view this licence, visit nationalarchives.gov.uk/doc/open-government-licence/version/3.
Where we have identified any third party copyright information you will need to obtain permission from the copyright holders concerned.
This publication is available at www.gov.uk/official-documents.
Any enquiries regarding this publication should be sent to us at [email protected] or [email protected]
Print ISBN 978-1-5286-3149-5
E02712832 01/22
Printed on paper containing 75% recycled fibre content minimum
Printed in the UK by the HH Associates Ltd. on behalf of the Controller of Her Majesty's Stationery Office
The Law Commissions
The Law Commission of England and Wales and the Scottish Law Commission were set up by the Law Commissions Act 1965 for the purpose of promoting the reform of the law.
The Law Commissioners of England and Wales are:
The Right Honourable Lord Justice Green, Chair
Professor Sarah Green
Professor Nick Hopkins
Professor Penney Lewis
Nicholas Paines QC
The Chief Executive of the Law Commission of England and Wales is Phil Golding.
The Law Commission is located at 1st Floor, Tower, 52 Queen Anne's Gate, London
SW1H 9AG.
The Scottish Law Commissioners are:
The Right Honourable Lady Paton, Chair
David Bartos
Professor Gillian Black
Kate Dowdalls QC
Professor Frankie McCarthy
The Interim Chief Executive of the Scottish Law Commission is Charles Garland.
The Scottish Law Commission is located at 140 Causewayside, Edinburgh, EH9 1PR.
The terms of this report were agreed on 8 December 2021
The text of this report is available on the Law Commission's website at
https://www.lawcom.gov.uk/project/automated-vehicles/
https://www.scotlawcom.gov.uk/law-reform/law-reform-projects/joint-projects/automated-vehicles/
Contents
LIST OF ABBREVIATIONS
GLOSSARY
The rationale for regulating automated vehicles
Preserving flexibility
Our terms of reference
A new regulatory framework
What is an “automated vehicle” (AV)?
Road vehicles
A focus on passenger transport
Areas outside the scope of this report
Our consultation
Consultation Paper 1
Consultation Paper 2
Consultation Paper 3
Structure of this report
When should a vehicle be considered as able to drive itself safely?
Safety assurance: initial authorisation and in-use safety
Regulating marketing about driving automation
New legal actors: the user-in-charge and NUIC operator
The duty of candour
Interference by third parties
Civil liability
Recommendations
Appendices
Additional material published alongside this report
Acknowledgements and thanks
The team working on this review
A new vocabulary
The SAE Taxonomy
The SAE Levels
The dynamic driving task
The operational design domain (ODD)
Automated vehicles, systems and features
“Self-driving”
Automated Lane Keeping Systems (ALKS)
Explaining driving automation to the public
“Road or other public place”
Three new legal actors
Authorised Self-Driving Entity (ASDE)
The user-in-charge
The NUIC operator
New regulatory schemes
The Secretary of State’s safety standard
Approval and authorisation as self-driving
In-use safety regulation
NUIC operator licensing
A new Automated Vehicle Act
Devolution
The need for a joint approach
Recommendation 1.
Overarching themes
Equality
Accessibility
Data
DRIVING
Why the line matters
Self-driving and monitoring
The definition in the Automated and Electric Vehicles Act 2018
“Monitoring” in the SAE Taxonomy
Our approach to monitoring in Consultation Paper 3
Conclusion: an individual does not need to monitor
Receptivity of a user-in-charge to a transition demand
Requirements for transition demands
A clear, multi-sensory signal
Sufficient time to gain situational awareness
The consequences of failing to take over control
Responding to events in the absence of a transition demand
The SAE view: responding to system failures, such as a tyre blow-out
The German view: “obvious circumstances”
France and Australia: responding to emergency vehicles
Our proposal in Consultation Paper 3
Conclusion: no requirement to respond without a transition demand 46
The monitoring test for vehicles without a user-in-charge
Recommendation: writing the threshold for self-driving into law
Recommendation 2.
Permitted activities for the user-in-charge
Guidance in the Highway Code
Prohibited activities
Recommendation 3.
Recommendation 4.
Preventing dangerous interventions by the user-in-charge
Recommendation 5.
Possible safety standards: consultees’ views
Option C: Safer than the average human driver
Option A: As safe as a competent and careful driver
Option B: As safe as a human driver who does not cause a fault accident
All three standards too low
Equity in the distribution of risk
Standards must be measurable
Safety standards: summarising the debate
Who should set a safety standard?
How would a safety standard be used?
The role of the safety standard pre-deployment
The role of the safety standard when vehicles are in-use
Our recommendation
Recommendation 6.
Recommendation 7.
Overview of our proposed approval and authorisation system
Stage 1: Approval stage
Two paths to approval
Approving an AV, not an ADS
GB whole vehicle approvals
Domestic AV technical approval
Recommendation 8.
Stage 2: Authorisation
The authorisation authority
Why is the authorisation stage necessary?
Support for a second authorisation stage
Authorisation outcomes: the effect of failing to gain authorisation
Different outcomes for different features?
Recommendation 9.
Authorisation assessment
The safety case
An equality impact assessment
Data
Registering the ASDE
ASDE requirements
Duties on the ASDE arising from authorisation
Recommendation 10.
Recommendation 11.
Recommendation 12.
Recommendation 13.
Recommendation 14.
Recommendation 15.
A new legislative framework
Appeals
Recommendation 16.
Recommendation 17.
A new statutory scheme
Recommendation 18.
Should AV authorisation and the in-use scheme have the same regulator?
In-use safety scheme: responsibilities
Evaluating the safety of AVs
Recommendation 19.
Recommendation 20.
Investigating traffic infractions involving AVs
Recommendation 21.
Recommendation 22.
Communication with users
Recommendation 23.
New powers to apply regulatory sanctions
Existing powers under the General Product Safety Regulations 2005
Warnings
Civil penalties
Redress orders
Compliance orders
Suspending and withdrawing authorisation
Restorative conferences
Appeals
Recommendation 24.
Recommendation 25.
Recommendation 26.
Recommendation 27.
Recommendation 28.
Search warrant powers
Recommendation 29.
Should the regulator have a consumer protection role?
Open to external views
Recommendation 30.
A forum to collaborate on road rules
Consultees’ views
Conclusion
Recommendation 31.
Collision Investigation
Recommendation 32.
Cybersecurity
Recommendation 33.
Driving automation that is not self-driving
The current law
Experience in other jurisdictions
Two new criminal offences
“Commercial practice”
Offence 1: Describing unauthorised driving automation as “selfdriving”
Recommendation 34.
Offence 2: Misleading drivers that a vehicle does not need to be monitored
Recommendation 35.
Online marketing across jurisdictions
Recommendation 36.
Enforcement
Recommendation 37.
Recommendation 38.
CHAPTER 8: THE ROLE OF A USER-IN-CHARGE
The definition of a user-in-charge
An individual
In position to operate the vehicle controls
In the vehicle
An ADS feature is engaged
Recommendation 39.
Qualified and fit to drive
Consultation Paper 3 proposals
Support for requirements to be qualified and fit to drive
Recommendation 40.
Causing or permitting an unfit or unqualified person to be a user-in-charge
Recommendation 41.
Being carried without a user-in-charge
The mental element
Recommendation 42.
What if an AV requiring a user-in-charge is made to drive empty?
Provisionally licensed drivers
Recommendation 43.
The immunity from dynamic driving offences
The French approach
What is dynamic driving?
The user-in charge’s immunity: recommendation
“Engaged” or “correctly engaged”?
Recommendation 44.
The liability of a user-in-charge for non-dynamic driving offences
Insurance
Roadworthiness
Parking
Duties following accidents
Ensuring child passengers wear seatbelts
Loading
Route planning
Recommendation 45.
Communicating the dynamic/non-dynamic distinction to users
Committing dangerous driving offences through non-dynamic failures 155
The effect of section 40A of the Road Traffic Act.
A new offence for users-in-charge
Recommendation 46.
Drafting the dynamic/non-dynamic distinction
Criminal liability following handover
A specific defence where problems are brought about by the ADS
Recommendation 47.
Failing to respond to a transition demand
Reacquiring driver obligations
Recommendation 48.
Medical emergencies
Recommendation 49.
Professional users-in-charge and passenger services
CHAPTER 9: NUIC OPERATOR LICENSING
Policy development: From HARPS operators to NUIC operators
Consultation Paper 2
Consultation Paper 3
The need for a NUIC operator to oversee the journey
Terminology
What oversight duties will arise?
Remote assistance compared to remote driving
Is the remote assistant role safety-critical?
The challenges of running a remote operations centre
Regulating the organisation or the individual?
Other NUIC operator duties
Maintenance
Insurance
Safety-critical updates and cybersecurity
Other duties: conclusion
Four models of NUIC operation
Model 1: Combining the ASDE and operator roles
Model 2: A separate NUIC operator
Model 3: Privately-owned NUIC vehicles
Model 4: NUIC operation confined to a geographically limited location 177
Recommendation: All NUIC vehicles to have a licensed operator
Recommendation 50.
Recommendation: Requirements for being a NUIC operator
Good repute
Financial standing
An establishment in Great Britain
Demonstrating professional competence
Recommendation 51.
Recommendation 52.
Recommendation 53.
Recommendation: submitting a safety case
A potential NUIC operator must submit a safety case
Recommendation 54.
Recommendation: setting licence conditions
Recommendation 55.
Recommendation: powers of the regulator
Regulatory sanctions
Recommendation 56.
Power to request information
Recommendation 57.
Inspection powers
Recommendation 58.
How long should a NUIC operator licence last?
Recommendation 59.
The role of criminal offences and traffic management penalties
Who should administer NUIC operator licensing?
Consultees’ views
Conclusion
Recommendation 60.
Issues not addressed in this report
Tier 2 duties for freight services
Remote driving
CHAPTER 10: NUIC PASSENGER SERVICES
The current law
The challenges of running passenger services without a driver
Passenger services in other jurisdictions
An interim permit procedure for NUIC passenger services
The need for more evidence
Devolution
A new procedure to grant interim passenger permits
Charging fares
Would vehicles need to be authorised?
Accessibility
An obligation to publish information on safeguarding and accessibility 200
Taxi and private-hire type services: the need for consent
NUIC passenger services and bus service regulation
Consultation with road authorities and the emergency services
Recommendation 61.
Enforcing the requirement for an interim passenger permit
Recommendation 62.
National accessibility standards and a statutory advisory panel
Recommendation 63.
Recommendation 64.
Longer term options for passenger services
CANDOUR
What we said in Consultation Paper 3
Reasons for the new offences
Provisional proposals
Support from consultees
When would the offences apply?
Information to both the authorisation authority and the in-use regulator 212
Extending the offence to NUIC operators as well as ASDEs
A continuing duty to provide information?
Defining “safety-relevant information”
Misrepresentations and non-disclosures to overseas regulator
Due diligence defence
The criminal liability of senior managers
Alternative definitions of senior management
“Consent or connivance”
The nominated person who signs the safety case
Criminal liability of senior managers: the overall effect
A new offence for other employees?
Aggravated offence for death or serious injury
Aggravated offences in road traffic law
Our provisional proposal
Consultees’ views
Our conclusion
A duty of fair presentation?
Prosecution
Penalties
Recommendation 65.
Summary of recommended changes to wrongful interference offences
Tampering with the mechanism
Recommendation 66.
Tampering with infrastructure
Unauthorised vehicle taking
England and Wales
Recommendation 67.
Scotland
Causing danger to road users
England and Wales
Scotland
Should section 22A extend to Scotland?
New aggravated offence of causing death by wrongful interference
Responses to Consultation Paper 3
Recommendation 68.
Mental state: intent to interfere
Recommendation 69.
An “approved work” defence
Automated and Electric Vehicles Act 2018: a brief overview
Injury to the insured person
Secondary claims
Listing and authorisation
Recommendation 70.
Contributory negligence and causation
Contributory negligence
Causation
Consultation Paper 3 proposals
Responses to Consultation Paper 3
Conclusion
Secondary claims under the Consumer Protection Act 1987
Problems with how product liability law treats software
Not essential for the introduction of AVs
Consultation Paper 3 proposal
Responses to Consultation Paper 3
Recommendation 71.
Uninsured vehicles
Recommendation 72.
Data retention
Our proposals
Responses to Consultation Paper 3
Conclusion
Recommendation 73.
Data sharing
Consultees’ views
Conclusion
Recommendation 74.
Recommendation 75.
List of Abbreviations
ABI: Association of British Insurers.
ADS: Automated Driving System.
ADSE: Automated Driving System Entity.
AEV Act: Automated and Electric Vehicles Act 2018.
ALKS: Automated Lane Keeping System.
ASDE: Authorised Self-Driving Entity.
AV: Automated Vehicle.
AVP: Automated Valet Parking.
BPRs: Business Protection from Misleading Marketing Regulations 2008, SI No 1276.
BSI: British Standards Institution.
CAV: Connected and Autonomous Vehicle.
CCAV: Centre for Connected and Autonomous Vehicles.
CP1: Consultation Paper 1.
CP2: Consultation Paper 2.
CP3: Consultation Paper 3.
CPRs: Consumer Protection from Unfair Trading Regulations 2008, SI No 1277.
DDT: Dynamic Driving Task.
DfT: Department for Transport.
DPTAC: Disabled Persons Transport Advisory Committee.
DSSAD: Data Storage Systems for Automated Driving.
DVSA: Driver and Vehicle Standards Agency.
EDR: Event Data Recorder.
GB: Great Britain.
GDPR: United Kingdom General Data Protection Regulation (EU) 2016/679.
GPSR: General Product Safety Regulations 2005, SI No 1803.
HARPS: Highly Automated Road Passenger Service.
HGV: Heavy Goods Vehicle.
HSW Act 1974: Health and Safety at Work etc Act 1974.
IEEE: Institute of Electrical and Electronics Engineers.
IVA: Individual vehicle approval.
MIB: Motor Insurers’ Bureau.
MIT: Massachusetts Institute of Technology.
MSU: Market Surveillance Unit.
NUIC: No User-in-Charge
NUIC operator: No User-in-Charge vehicle operator.
ODD: Operational Design Domain.
OECD: Organisation for Economic Co-operation and Development.
OEM: Original Equipment Manufacturer.
PSV: Public Service Vehicle.
RoSPA: Royal Society for the Prevention of Accidents.
SAE: Society of Automotive Engineers International.
SMMT: Society of Motor Manufacturers and Traders.
StVG: Strassenverkehrsgesetz (the German Road Traffic Act).
TfL: Transport for London.
TfWM: Transport for West Midlands.
UIC: User-in-charge.
UNECE: United Nations Economic Commission for Europe.
VCA: Vehicle Certification Agency.
Glossary
ABI/Thatcham Report: Association of British Insurers (ABI) and Thatcham Research, Defining Safe Automated Driving. Insurer Requirements for Highway Automation (September 2019).
ALKS Regulation: UN Regulation 157 on uniform provisions concerning the approval of vehicles with regard to Automated Lane Keeping Systems E/ECE/TRANS/505/Rev.3/Add.156 (ALKS Regulation). It was made under the procedures set out in the UNECE 1958 Agreement (below) and entered into force on 22 January 2021.
Approval authority: Under the UNECE 1958 Agreement (described below), each Contracting Party must specify an approval authority. The approval authority has responsibility for issuing approvals pursuant to a UN Regulation, though it may designate technical services to carry out testing and inspections on its behalf. The approval authority for the UK is the Vehicle Certification Agency (VCA).
Authorisation authority: A new role recommended in this report. It will be the government agency responsible for the second stage (authorisation) of AV safety assurance in Great Britain. When authorising the vehicle, the authorisation authority will assess each of the vehicle’s ADS features and specify those which are “self-driving”. The authorisation authority will also assess whether the entity putting the vehicle forward for authorisation has the reputation and financial standing required to be an ASDE. See Chapter 5.
Automated Driving System (ADS): A term used in the SAE Taxonomy to describe a vehicle system that uses both hardware and software to perform the entire dynamic driving task on a sustained basis.
Automated Driving System Entity (ADSE): We used this term in Consultation Papers 1 and 3 to refer to the entity we now call an Authorised Self-Driving Entity (ASDE) (see below).
Automated Driving System (ADS) feature: A part of an ADS designed to operate in a particular operational design domain. As single automated vehicle may have several features: see Chapter 2.
Automated Lane Keeping System (ALKS): An ADS feature which steers and controls vehicle speed in lane for extended periods on motorway-type roads. See Chapter 2.
Authorised Self-Driving Entity (ASDE): A role recommended in this report. It is the entity that puts an AV forward for authorisation as having self-driving features. It may be the vehicle manufacturer, or a software designer, or a joint venture between the two. We discuss the ASDE role and its associated obligations in Chapter 5. We previously referred to it as an Automated Driving System Entity (ADSE).
Automated vehicles: A general term used to describe vehicles which can drive themselves without being controlled or monitored by an individual for at least part of a journey. They have an ADS able to perform the entire dynamic driving task.
Commercial practice: Defined in the Consumer Protection from Unfair Trading Regulations 2008 as “any act, omission, course of conduct, representation or commercial communication (including advertising and marketing) by a trader, which is directly connected with the promotion, sale or supply of a product to or from consumers, whether occurring before, during or after a commercial transaction (if any) in relation to a product”.
Conditional automation: A term used in the SAE Taxonomy to describe an automated driving system which can perform the entire dynamic driving task but with the expectation that a user will be receptive and respond appropriately to requests to intervene and to certain failures affecting the vehicle: SAE Level 3.
Consultation Paper 1: The first consultation paper in the joint review of automated vehicles by the Law Commission and Scottish Law Commission. It was published in November 2018 and is available at: https://www.lawcom.gov.uk/project/automated-vehicles/.
Consultation Paper 2: The second consultation paper in the joint review of automated vehicles by the Law Commission and Scottish Law Commission. It was published in October 2019 and is available at: https://www.lawcom.gov.uk/project/automated-vehicles/.
Consultation Paper 3: The third consultation paper in the joint review of automated vehicles by the Law Commission and Scottish Law Commission. It was published in December 2020 and is available at: https://www.lawcom.gov.uk/project/automated-vehicles/.
Cybersecurity Regulation: UN Regulation 155 on uniform provisions concerning the approval of vehicles with regards to cybersecurity and cyber security management system E/ECE/TRANS/505/Rev.3/Add.154. It was made under the procedures set out in the UNECE 1958 Agreement (below) and entered into force on 22 January 2021.
Driver support: Driving automation features such as adaptive cruise control or lane changing features which support the driver. The driver is still responsible for the dynamic driving task, including monitoring the environment.
Driving automation: A generic term used in the SAE Taxonomy to apply to all six levels of automation. It covers the full range of driving technology, from driver support features to automated driving features capable of carrying out the whole dynamic driving task.
Dynamic Driving Task (DDT): A term used in the SAE Taxonomy to describe the real-time operational and tactical functions required to operate a vehicle in on-road traffic. It includes steering, accelerating and braking together with object and event detection and response. See Chapter 2.
Fault accident: An accident where, if a human driver had driven the car instead of an ADS, the driver would be held liable for causing the accident in the civil law of negligence.
GB whole vehicle approval: We use this term to refer to the three domestic schemes to approve vehicles in Great Britain: individual vehicle approvals (IVAs), GB small series approvals and GB Type Approval. See Chapter 5.
Haptic: Involving the transmission of information through the sense of touch. Haptic alerts may (for example) shake the seat or vibrate the seat belt.
HARPS: Highly automated road passenger services. We used this term in Consultation Paper 2 to refer to a service which uses highly automated vehicles to supply road journeys to passengers without a human driver or user-in-charge. In this report we discuss the regulation of such passenger services through interim passenger permits, as set out in chapter 10.
HF-IRADS: Human Factors in International Regulations for Automated Driving Systems group position paper submitted on 18 September 2020 to the Global Forum for Road Traffic Safety.
Highly automated vehicle: A term used in the SAE Taxonomy to describe a vehicle equipped with an automated driving system which can perform the dynamic driving task without requiring a user to be receptive to requests to intervene. Also known as SAE Level 4.
Human factors research: The study of how humans behave, both physically and mentally, in relation to particular environments, systems, products or services. Also sometimes referred to as ergonomics.
Individual vehicle approval (IVA): The approval scheme for vehicles and trailers which have been imported, assembled or manufactured as individual vehicles. The scheme checks that vehicles meet required technical, safety and environmental standards. The Driver and Vehicle Standards Agency (DVSA) administers the scheme in Great Britain.
Interim passenger permit: A new provision recommended in this report. The permit would be granted by ministers for passenger services using NUIC vehicles. See chapter 10.
In-use regulator: A new role recommended in this report. The in-use regulator will have statutory duties and powers to maintain in-use safety once AVs are deployed on GB roads. See Chapter 6.
Minimal risk condition: A term used in the SAE Taxonomy to describe a stable, stopped condition to which a user or an ADS may bring a vehicle to reduce the risk of a crash when a given trip cannot or should not be continued.
No user-in-charge (NUIC) vehicle: A new category recommended in this report. It refers to a vehicle equipped with one or more ADS features designed to perform the entire dynamic driving task without a user-in-charge.
Operational design domain (ODD): A term used in the SAE Taxonomy to describe the domain within which an automated driving system can drive itself. It may be limited by geography, time, type of road, weather or by some other criteria.
Provisional GB Type Approval: The interim scheme in place of EU whole vehicle type approval since 1 January 2021 following the UK’s exit from the EU. It is expected that in 2022, a comprehensive GB Type Approval scheme will replace the provisional scheme.
Remote oversight: Using connectivity to allow a human to oversee vehicles even if they are not in the vehicle. It refers to tasks conducted by staff while NUIC vehicles are in use, such as identifying unexpected objects and managing emergencies. See Chapter 9.
Risk mitigation manoeuvre: A manoeuvre which is sufficient to reduce the risk of a crash, if the user-in-charge fails to respond to a transition demand. In Chapter 3 we explain that what is sufficient would be set by regulators.
SAE Taxonomy: Society of Automotive Engineers International, J3016 Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles, It was first published in 2014 and last revised, in collaboration with the International Standards Organisation (ISO), in April 2021.
Safety driver: A person who, as part of their employment, test drives vehicles equipped with driving automation technologies.
Self-driving features: Under the scheme outlined in Chapter 5, the authorisation authority would specify that an ADS feature is self-driving. The authority must be satisfied that the feature can control the vehicle so as to drive safely and legally, even if an individual is not monitoring the driving environment, the vehicle or the way that it drives. Once a vehicle is authorised as having a self-driving feature, and that feature is engaged, the human in the driving seat would no longer be responsible for the dynamic driving task.
Small series type approval: An approval scheme with technical and administrative requirements commensurate with smaller production runs. The UK’s approval authority for small series type approvals is the VCA.
Society of Automotive Engineers International (SAE): A global association of engineers and technical experts in the aerospace, automotive and commercial-vehicle industries. Its taxonomy established six levels of driving automation in technical document J3016.
Society of Motor Manufacturers and Traders (SMMT): A trade association representing more than 800 automotive companies in the UK.
Software Update Regulation: UN Regulation 156 on uniform provisions concerning the approval of vehicles with regards to software updates and software update management system E/ECE/TRANS/505/Rev.3/Add.155. It was made under the procedures set out in the UNECE 1958 Agreement (below) and entered into force on 22 January 2021.
Transition demand: An alert issued by an ADS to the user-in-charge to take over the dynamic driving task, communicated through visual, audio and haptic signals, which gives the user-in-charge a transition period within which to respond. Absent a response, the ADS performs a risk mitigation manoeuvre bringing the vehicle to a stop. This term is also used in UN Reg 157 on Automated Lane Keeping Systems, to refer to a “logical and intuitive procedure to transfer the Dynamic Driving Task (DDT) from the system (automated control) to the human driver (manual control)”.
Transition period: The period of time between the start of the transition demand and the time when the user-in-charge is expected to take over the dynamic driving task.
Type approval: Type approval is the confirmation that production samples of a type of vehicle, vehicle system, component or separate technical unit meets specified requirements. The process involves the testing of production samples and the evaluation of the measures in place to ensure conformity of production. Once type approval is given by an approval authority it allows the manufacturer to produce the vehicle type in an unlimited series, providing vehicles continue to meet the specified requirements.
United Nations Economic Commission for Europe (UNECE): The organisation was established in 1947 to promote economic cooperation and integration among its member states. The UNECE provides a multinational platform for policy dialogue, negotiation of international legal instruments and development of regulations and norms. It administers the UNECE 1958 Agreement (below).
UNECE 1958 Agreement: An international agreement governing the approval of motor vehicles in 56 countries. It was agreed in 1958 and has since been revised three times. The full title and citation for the third revision is “Agreement concerning the Adoption of Harmonized Technical United Nations Regulations for Wheeled Vehicles, Equipment and Parts which can be Fitted and/or be Used on Wheeled Vehicles and the Conditions for Reciprocal Recognition of Approvals Granted on the Basis of these United Nations Regulations (Revision 3) E/ECE/TRANS/505/Rev.3”. This is referred to in the report as the “revised 1958 agreement”. For the text, see https://unece.org/fileadmin/DAM/trans/main/wp29/wp29regs/2017/E-ECE-TRANS-505-Rev.3e.pdf.
User-in-charge: An individual who is in the vehicle and in position to operate the driving controls while a self-driving ADS feature is engaged. The user-in-charge is not responsible for the dynamic driving but must be qualified and fit to drive. They might be required to take over following a transition demand. They would also have obligations relating to non-dynamic driving task requirements including duties to maintain and insure the vehicle, secure loads carried by the vehicle and report accidents. An automated vehicle would require a user-in-charge unless it is authorised to operate without one. See Chapter 8.
been asked by the Centre for Connected and Autonomous Vehicles (CCAV) 1to review the law relating to automated vehicles (AVs). This report presents our recommendations for a new regulatory framework to govern the introduction and continuing safety of AVs on roads or other public places in Great Britain (GB).
THE RATIONALE FOR REGULATING AUTOMATED VEHICLES
-
1.2 By AVs, we refer to vehicles which can drive themselves without being controlled or monitored by an individual for at least part of a journey. They are sometimes also called autonomous vehicles or driverless cars. At the time of preparing this report, automated vehicle technology is in an advanced state of development but has yet to come into common use.
-
1.3 The possible benefits of this technology are far-reaching. AVs have the potential to improve road safety, give greater independence to people unable to drive, and provide new opportunities for economic growth.2 However, these potential benefits are not inevitable: uncertainty and regulatory barriers can impede innovation. Furthermore, the benefits are balanced by potential risks if things go wrong. Regulation has a central role to play in all these areas: maximising the benefits, reducing the risk of harm being caused by malfunctioning AVs, and providing incentives and space for responsible innovation to flourish.
Preserving flexibility
-
1.4 This is the first time that the Law Commissions have been asked to develop legal reforms in anticipation of future technological development. We are conscious of many uncertainties about how AVs will develop. The challenge is to regulate at the right time; premature or over-rigid intervention could stifle innovation, but late intervention could jeopardise safety.
-
1.5 We appreciate the industry’s desire for a clear and certain route to market, so they understand what is required to be able to deploy AVs on GB roads. We hope that our recommendations, once implemented, will provide such a route. At the same time, we are aware that in practice things may turn out to be quite different from how we imagine. Given this level of uncertainty, the theme of flexibility permeates our report.
-
1.6 Our recommendations aim to keep safety and innovation at the forefront, while also retaining the flexibility required to regulate for uncertain future development. Our recommended legislation leaves more discretion to regulators and future policy makers than might be expected in a more mature industry.
OUR TERMS OF REFERENCE
A new regulatory framework
To consider where there may be gaps or uncertainty in the law, and what reforms may be necessary to ensure that the regulatory framework is fit for purpose, including but not limited to addressing the following issues:
-
(1) who is the ‘driver’ or responsible person, as appropriate;
-
(2) how to allocate civil and criminal responsibility where control is shared between the automated driving system and a human user;
-
(3) the role of automated vehicles within public transport networks and emerging platforms for on-demand passenger transport, car sharing and new business models providing mobility as a service;
-
(4) whether there is a need for new criminal offences to deal with possible interference with automated vehicles and other novel types of behaviour; and
-
(5) the impact on other road users and how they can be protected from risk.
What is an “automated vehicle” (AV)?
-
1.9 Driving automation refers to a range of vehicle technologies. At present many technologies support human drivers by facilitating or taking over part of the task (such as advanced cruise control). This report anticipates that in future these technologies will develop to allow vehicles to drive themselves with no human intervention.
-
1.10 Our terms of reference describe an AV as a vehicle that is designed to be capable of “driving itself”: to operate in a mode, “in which it is not being controlled and does not need to be monitored by an individual, for at least part of a journey”.3 Our focus is therefore on automated driving systems which replace a human driver for at least part of a journey, rather than those which merely offer driving support.
-
1.11 Driver support technology is already in use and is presenting challenges. Drivers who misunderstand or over-rely on this technology can create significant safety risks.4 Throughout this project, stakeholders have highlighted the need for a clear boundary between technology which merely assists a human driver, and that which enables a vehicle to drive itself without being monitored. This requires consideration of technologies on each side of the boundary.5
Road vehicles
-
1.12 The review only covers “road based” AVs. We have interpreted this to refer to AVs which are used on roads or in other public places. The phrase “roads or other public places” is frequently used in British legislation and is discussed in Chapter 2. 6It includes pavements, but excludes places to which the public do not have access, such as warehouses or quarries.
-
1.13 We were asked not to look at land use: the provision of roads or how they are used. We therefore do not consider whether there should be new roads or new road infrastructure to accommodate AVs. Nor do we seek to restrict any existing road users exercising their right to use roads or other public places. Our assumption is that AVs will be introduced onto Britain’s existing road network, or something that broadly resembles existing roads.
A focus on passenger transport
-
1.14 We were asked to focus on passenger transport, as distinct from goods deliveries. 7The freight industry has a distinct regulatory framework and specialised stakeholders. We nevertheless welcomed input from the freight industry as we developed our proposals. Most of our recommendations apply to all road vehicles, irrespective of use, and would therefore also apply to freight vehicles. We suggest an additional permit scheme for passenger services in Chapter 10.8
Areas outside the scope of this report
OUR CONSULTATION
Consultation Paper 1
-
1.18 We published our first consultation paper (“Consultation Paper 1”) in November 2018. We looked at issues that affect all AVs regardless of how they are used. First, we considered how safety can be assured before AVs are placed on the market, as well as safety assurance once they are on the road. Second, we explored criminal and civil liability. Finally, we examined the need to adapt road rules for artificial intelligence.
-
1.19 We received 178 written responses. The full analysis of responses as well as the individual responses to Consultation Paper 1 are available online.12
Consultation Paper 2
-
1.20 Our second paper (“Consultation Paper 2”) was published in October 2019. It focused on the regulation of Highly Automated Road Passenger Services, or “HARPS”. We coined the term HARPS to encapsulate the idea of a new service. It referred to a service which uses highly automated vehicles to supply road journeys to passengers without the need for a responsible person on board. Such a vehicle would be able to travel empty or with only passengers on board. We considered a national operator licensing scheme for HARPS.
-
1.21 Our proposals distinguished between passenger services and other types of vehicle which could travel without a responsible person on board (such as freight services or private vehicles). However, many consultees responded that these distinctions were overly complex and difficult to apply in practice. We have consequently simplified our proposals to recommend a single licensing scheme which applies to all vehicles without a responsible human in the vehicle. These recommendations are set out in Chapter 9.
-
1.22 We received 109 responses to the paper from consultees working in a wide variety of sectors. The full analysis of responses as well as all of the individual responses to Consultation Paper 2 are available online.13
Consultation Paper 3
-
(a) those that may require a person (whom we call a “user-in-charge”) to take over driving for part of a journey. An example would be AVs that can only drive themselves on motorways; and
-
(b) “no user-in-charge” (NUIC) features that can complete a whole journey
without intervention by anyone on board (such as remotely operated ridehailing).
-
(2) safety assurance regulation, both before vehicles are put onto the market and while they are in use. This involved a shift away from the criminal enforcement of traffic rules towards a new no-blame safety culture.
-
(3) three legal roles associated with automated driving: AV manufacturers/ developers; users of AVs that are less than drivers but more than passengers (the user-in-charge); and NUIC operators.
-
1.24 We received 117 responses, which are available on our website. We are especially grateful to all consultees who contributed despite the pressures of COVID-19, whether by providing a written response or giving their views through virtual meetings and conferences. A full analysis of responses is being published alongside this report.15
STRUCTURE OF THIS REPORT
-
(1) Chapter 1 is this introduction.
-
(2) Chapter 2 introduces key concepts. First, we explain the vocabulary associated with driving automation. Second, we outline the new legal actors and regulatory schemes recommended in this report. We then set out a recommendation for a new Automated Vehicles Act and discuss the devolution issues involved. Finally, we look at three overarching themes: equality, accessibility and data.
When should a vehicle be considered as able to drive itself safely?
threshold from driver assistance to “self-driving”. We recommend a high test for a vehicle to be authorised as having self-driving features: it must be safe even if a human user is not monitoring the driving environment, the vehicle or the way it drives. A user may be required to respond to a clear and timely signal to take over driving (a “transition demand”), but otherwise must not be relied on to respond to events or circumstances.
-
(4) Chapter 4 considers when an AV is safe enough to be deployed on public roads. The issue divides opinion. While some consultees argued that AVs need only be marginally safer than human drivers, others thought that AVs should be substantially safer to gain public acceptance. We see the issue as one for political judgement. We recommend that the Secretary of State for Transport publishes a safety standard by which the safety of automated and conventional driving should be compared. A new AV in-use regulator would then be responsible for collecting the required data.
Safety assurance: initial authorisation and in-use safety
-
(5) Chapter 5 sets out our proposed authorisation scheme and explains its interaction with the existing process for the approval of vehicles. We recommend a process to assess whether a vehicle meets the threshold required to be considered as having self-driving features. The manufacturer or developer putting the vehicle forward for authorisation will need to submit a safety case demonstrating that the threshold for self-driving is met. This entity will also need to show that it is capable of keeping the vehicle safe on an ongoing basis. If so, it will be registered as an Authorised Self-Driving Entity (or ASDE) and subject to regulatory sanctions if things go wrong.
-
(6) Chapter 6 recommends legislation to establish a new AV in-use regulator, with statutory duties and powers. If an authorised AV breaches traffic rules while driving itself, this will no longer involve criminal prosecution. Instead, the in-use regulator will be given powers to apply a wide range of regulatory sanctions, including civil penalties, improvement notices and (where necessary) suspension of authorisation. The emphasis will be on a learning culture, which prevents problems from recurring.
Regulating marketing about driving automation
-
(7) Chapter 7 considers the current regulation of misleading marketing. We conclude that it does not fully address the mischief that drivers using systems that fall short of self-driving may be misled into thinking that they do not need to pay attention to the road. This is dangerous both for them and for other road users. We therefore recommend two new criminal offences, to restrict the use of certain terms (such as “self-driving”) and to prohibit practices which confuse drivers about the need to pay attention.
New legal actors: the user-in-charge and NUIC operator
-
(8) Chapter 8 focuses on the user-in-charge. In simple terms, a user-in-charge is the human in the driving seat while a self-driving feature is engaged. Their main role is to take over driving, either following a transition demand or because of conscious choice. We recommend that a user-in-charge must be qualified and fit to drive. They have some “driver” responsibilities, such as insuring the vehicle and reporting accidents. However, while the vehicle is driving itself, the user-in-charge has an immunity against any criminal offence arising from the performance of the driving task.
-
(9) Chapter 9 considers vehicles authorised to operate with no user-in-charge (NUICs). We recommend that every NUIC vehicle should be overseen by a licensed NUIC operator, with responsibilities for dealing with incidents and (in most cases) for insuring and maintaining the vehicle.
-
(10) Chapter 10 considers the additional regulation needed for passenger services using NUIC vehicles, without a driver or user-in-charge. Given the many unknowns in this area, we recommend a new form of interim permit for these services. All such services should involve an element of “co-design” to address issues of accessibility.
The duty of candour
-
1.30 Our aim is to promote a no-blame safety culture that learns from mistakes. We see this as best achieved through a system of regulatory sanctions rather than by replicating the criminal sanctions applying to drivers of conventional vehicles. However, this relies on the honesty and transparency of the ASDE and NUIC operator in sharing information with regulators.
-
(11) Chapter 11 recommends new criminal offences where an ASDE or NUIC operator misleads regulators or conceals safety-relevant information. We discuss the liability of the entity and its senior managers, and recommend an aggravated offence where a lack of candour leads to a death or serious injury.
Interference by third parties
Civil liability
-
(13) Chapter 13 reports on our review of the 2018 Act. We recommend that the listing procedure under section 1 of the Act is replaced by our authorisation procedure. However, on issues of substantive liability, our conclusion is that the 2018 Act is “good enough for now”. It should be reviewed in the light of practical experience.
Recommendations
Appendices
-
(1) Appendix 1 contains a list of stakeholders we have met and conferences attended throughout the project.
-
(2) Appendix 2 contains the project’s Terms of Reference.
-
(3) Appendix 3 relates to Chapter 7. It contains our analysis of the current law on misleading marketing about unauthorised driving automation.
ADDITIONAL MATERIAL PUBLISHED ALONGSIDE THIS REPORT
-
1.34 This report is the culmination of over three years’ work, involving analysis of the current law and wide consultation. To keep the length of this report within reasonable bounds, we focus on setting out our recommendations. Interested readers may wish to look at the following additional material that we are publishing alongside this report:
-
(1) a 32-page summary and a 4-page overview;
-
(2) a full analysis of responses to Consultation Paper 3;
-
(3) an impact assessment setting out the costs and benefits of our recommendations;
-
(4) Background Paper A, “Who is liable for road traffic offences?”. We originally published this alongside Consultation Paper 1, but we have updated and added to it;
-
(5) Background Paper B: “The role of the driver in passenger licensing”. This considers how far a driver is integral to existing schemes of private hire, taxi and PSV regulation.16
-
1.35 For further analysis of existing law, readers are referred to our consultation papers. These include an overview of private hire, taxi and PSV regulation; 17bus regulation;18 vehicle standard regulation;19 and the current law of market surveillance.20
ACKNOWLEDGEMENTS AND THANKS
-
1.36 Our thanks go to all those who took part in the three rounds of consultation, both for participating in consultation events or meeting with us to discuss the consultation papers, and for submitting formal written responses. We have held more than 350 meetings with individuals and organisations contributing to the project, and we are very grateful to them for giving us their time and expertise.
-
1.37 We include a list of stakeholders we have met and conferences attended during the project in Appendix 1.
THE TEAM WORKING ON THIS REVIEW
-
1.38 Various staff have contributed to this final report. At the Law Commission of England and Wales the lead lawyers were Jessica Uguccioni, Tamara Goriely and Connor Champ. They were assisted by the following researchers across the Scottish Law Commission and the Law Commission of England and Wales: first by Jagoda Klimowicz, Gianna Seglias, Elizabeth Connaughton and Alison Hetherington; and then by Matthew Timm, Gwen Edmunds and Hannah Renneboog.21
-
1.39 We would also like to thank Henni Ouahes (Head of Public Law, Law Commission of England and Wales), Charles Garland (lawyer and interim Chief Executive, Scottish Law Commission), Vindelyn Smith-Hillman (Chief Economist, Law Commission of England and Wales), and Douglas Hall (Office of Parliamentary Counsel) for their input during this review.
-
Chapter 2: Introducing key concepts
-
2.1 Many driver support features are currently available to help a human driver. This report anticipates that, in future, these features will develop to a point where a human can use them without paying attention to the road. Instead, an automated vehicle (AV) will be able to drive itself for at least part of a journey. This has profound legal consequences. The human driver can no longer be the principal focus of accountability for road safety. Instead, new systems of safety assurance are needed, both before and after vehicles are allowed to drive themselves on roads and other public places.
-
2.2 Existing law reflects a division between rules governing vehicle design on the one hand and the behaviour of drivers on the other. This is true at both international level (through the United Nations Economic Commission for Europe (UNECE)) 22and at domestic level. Legislating for self-driving requires an integrated approach, bridging these two regulatory spheres: the automated driving system (ADS) constitutes equipment fitted in a vehicle, but it also determines the behaviour of the vehicle.23
-
2.3 To accommodate AVs, we need a new vocabulary, new legal actors and new regulatory schemes. Here we look briefly at each. These new actors and schemes require primary legislation: we therefore recommend a new Automated Vehicles Act. Finally we consider three overarching themes: equality, accessibility and data.
A NEW VOCABULARY
-
2.4 As with every new endeavour, driving automation has acquired its own specialist language. The Society of Automotive Engineers International (SAE) has pioneered common terms to discuss driving automation through its detailed taxonomy. The SAE Taxonomy is best known for establishing six “levels” of driving automation. As we explain in Chapter 3, we do not tie our recommendations to an SAE level. However, an understanding of SAE levels is needed to participate in wider policy debates and make comparisons across jurisdictions.
-
2.5 We draw on other concepts used by the SAE, including “dynamic driving task” (DDT) and “operational design domain” (ODD). We explain our use of the words automated vehicle (AV); automated driving system (ADS); ADS feature; and self-driving.
The SAE Taxonomy
-
2.6 The SAE first published its “taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles” in 2014. Since then, the taxonomy has been updated several times and has been widely quoted throughout the world. In this report we refer to the latest version, published in April 2021.24
-
2.7 The SAE Taxonomy describes its purpose as “descriptive and informative, rather than normative”, and “technical rather than legal”.25 Its aim is to provide a common language to discuss driving automation technologies, not to prescribe how they should be regulated.
The SAE Levels
-
2.8 The SAE summarises the six levels of automation in the following figure:
 |
|
Figure 2.1 A simplified visual chart of the SAE J3016 levels (from SAE.org). |
-
2.9 Note that the SAE use the phrase “driving automation” as a generic word to apply to all levels. However, it makes a crucial distinction between “driver support features” (which must be supervised by a human driver) and “automated driving” (where a human is not driving, even if sitting in the driving seat).
-
2.10 During previous consultations, we found considerable variation in what people understood each level of automation to cover, even among those working in the field.26
-
2.11 The most difficult level is “conditional automation” (Level 3), in which the automated driving feature is generally capable of performing all the driving tasks but a human in the driving seat is expected to respond to its “request to intervene”. In SAE terminology, at Level 3, a human “fallback-ready user” must be receptive to the request or to an evident vehicle systems failure but is not expected to monitor the driving environment.27
-
2.12 Level 3 can be contrasted with Level 4 (high automation). Here, if the user fails to respond to a handover alert the issue is not safety-critical. Instead the system will put the vehicle into a “minimal risk condition”: a stable, stopped condition which reduces the risk of a crash.28
Design intent v legal prescription
As a practical matter, it is not possible to describe or specify a complete test or set of tests which can be applied to a given ADS feature to conclusively identify or verify its level of driving automation. The level assignment rather expresses the design intention for the feature....29
-
2.14 This report has a different aim. We recommend a regulatory framework to verify whether automated driving reaches the required standard to be treated differently from assisted driving.
-
2.15 Our tests are not tied to a particular SAE level. In Chapter 3 we recommend that, for an ADS feature to be considered self-driving, the authorisation authority must be satisfied that it can control the vehicle so as to drive safely and legally, even if an individual is not monitoring the driving environment, the vehicle or the way that it drives. The vehicle may issue a transition demand, requiring the human in the driving seat to take over, but the transition demand must be communicated by clear, multi-sensory signals and give the user-in-charge sufficient time to gain situational awareness.
The dynamic driving task
-
(1) sustained lateral and longitudinal motion-control of the vehicle: steering, accelerating and braking;
-
(2) object and event detection, recognition, classification, response preparation and response execution: monitoring the driving environment and reacting to other road users and the conditions of the road.30
-
2.17 Several “driver support” features, such as advanced cruise control, can steer, accelerate and brake, but cannot respond to all the conditions of the road. These features still require the driver to pay attention and react to other road users and road signs. Without “object and event detection and response”, 31a vehicle cannot carry out the whole dynamic driving task.
-
2.18 In law, drivers have many responsibilities. Many relate to the way that a driver monitors the driving environment and reacts to it, by (for example) steering and braking. However, the law also imposes responsibilities on drivers which do not relate to dynamic driving. Examples would be holding insurance, maintaining roadworthiness or ensuring that children wear seat belts. 32In this report, we draw a key distinction between dynamic driving offences and other “non-dynamic” offences.
The operational design domain (ODD)
-
2.19 The operational design domain (ODD) sets out the conditions in which any automated driving system or feature is designed to function. The conditions may relate to anything. They may, for example, relate to a place (such as Milton Keynes); a type of road (such as a motorway); a time of day (such as during daylight); a speed (such as under 60 km per hour); or weather (such as not in snow). 33The ODD is set by the manufacturer and (under our recommended scheme) must be endorsed by the authorisation authority.
-
2.20 While driving, an ADS may exit its ODD for many reasons: in our examples, the vehicle may leave the motorway, or it might start snowing. When this happens, the system will usually need to issue a transition demand to a human to take over driving or come to a stop. In some cases, the ADS may continue to drive the vehicle at reduced speed until it can stop safely. The latest draft of the SAE Taxonomy acknowledges that during this time, “an ADS may operate temporarily outside of its ODD”.34
Automated vehicles, systems and features
-
(1) An automated driving system (ADS) is defined by the SAE as the combination of software and hardware capable of performing the entire DDT.35 ADS refers to a system within a vehicle, not the vehicle itself. A single ADS may operate in different ODDs.
-
(2) An “automated vehicle” (AV) is a generic term. It refers to a vehicle equipped with an ADS which is able to conduct the entire dynamic driving task in one or more operational design domains. A vehicle may be an AV even if the ADS is not engaged at the time. The term refers to a vehicle which is capable of selfdriving, at least in some circumstances.
-
(3) An ADS feature is part of an ADS, which is designed to operate in a particular ODD. A single AV may have several ADS features. For example, it may have a motorway feature, allowing the AV to drive itself on the motorway with a user-in-charge. It may also have an automated valet parking feature, allowing it to park itself in some car parks with no user-in-charge. As the SAE describe it:
A given driving automation system may have multiple features, each associated with a particular level of driving automation and ODD.36
“Self-driving”
-
2.22 The term “self-driving” is not used by the SAE, who describe it as a “deprecated term”.37 We use the term because it can be given its own specific definition and does not carry other meanings in the SAE Taxonomy. As we explain in Chapter 3, we use it to indicate a legal threshold. Once a vehicle has been authorised as having a “selfdriving” ADS feature, and the feature is engaged, the human in the driving seat is no longer responsible for the dynamic driving task.
-
2.23 The Automated and Electric Vehicles Act 2018 refers to vehicles which are capable “in at least some circumstances or situations, of safely driving themselves”.38 In section 8(1)(a), a vehicle is said to be “driving itself” if it is “operating in a mode in which the vehicle is not being controlled, and does not need to be monitored, by an individual”.
In this report we largely endorse this definition, which embeds safety. Before being authorised, the authorisation authority must be satisfied that the vehicle is safe even if an individual is not monitoring the driving environment, the vehicle or the way it drives.
Automated Lane Keeping Systems (ALKS)
-
2.25 Automated Lane Keeping Systems allow a vehicle to steer and control speed within its lane for extended periods. In 2020, the United Nations Economic Commission for Europe (UNECE) agreed a new regulation to approve the use of ALKS on motorwaytype roads. In January 2021, Regulation 157 entered into force in the UK and the other 53 UNECE contracting parties. 39It enables ALKS to receive type approval under the international scheme of vehicle approval described in Chapter 5.40 In December 2021, Mercedes was the first manufacturer to secure approval of an ALKS feature under Regulation 157 from the German type approval authority, KBA. 41Mercedes state that, in the first half of 2022, new cars will be available with a feature which is able to drive in congested situations “on suitable stretches of motorway in Germany”.42
-
2.26 When first adopted, the ALKS Regulation only applied to passenger cars and vans, and for speeds up to 60km (37 miles) per hour.43 However, the regulation is continuing to evolve. In November 2021 amendments were adopted which extended the ALKS Regulation to heavy vehicles including trucks, buses and coaches. 44This amendment is expected to enter into force in June 2022. The Special Interest Group on UNECE Regulation 157 has been progressing further amendments to the ALKS Regulation, including:
-
(1) increasing the maximum speed to 130 km (80 miles) per hour;
-
(2) lane change and minimum risk manoeuvre capabilities; and
-
(3) standards for “detectable collisions”.45
-
2.27 In Consultation Paper 3 we used ALKS as a case study for what it means for a vehicle to be able to “drive itself”. We concluded that although the ALKS regulation was “a first regulatory step” towards automated driving, it was up to each jurisdiction decide the civil and criminal consequences of using an ALKS. As we discuss below, our recommended initial safety assurance scheme has two stages; approval and authorisation. Although approval under Regulation 157 is sufficient to meet the first hurdle, an ALKS feature will only be lawfully used in self-driving mode once the vehicle has passed the second authorisation stage.
Explaining driving automation to the public
-
2.28 One difficulty with understanding driving automation is the complexity and impenetrability of the language associated with it. The crucial distinction between “driving automation” and “automated driving” may not be immediately apparent.46 Acronyms abound: ADS, DDT, ODD. Each concept depends on understanding another concept. One cannot understand the nature of an ADS feature without understanding that it involves a system (the ADS) which can perform the entire DDT in an ODD.
-
2.29 This makes it difficult to give a succinct and clear message to the public about how to interact with driving automation. Work is being done in this area. For example, Euro NCAP has developed a five-star safety rating system for consumers, to communicate the limitations of driver assist systems available on the market today.47 Furthermore, in September 2019 ABI/Thatcham published a joint document setting out a three-part taxonomy:48
-
(1) Assisted driving, where the driver remains in charge of the driving task and must constantly monitor the road environment.
-
(2) Automated driving, where the user-in-charge needs to be available for transition of control, but not to maintain safety.
-
(3) Autonomous driving, where the vehicle has full responsibility for the dynamic driving task, and the user is effectively a passenger.
-
2.30 These concepts are similar to the distinctions in this report between driver assistance, user-in-charge features and no user-in-charge features.
-
2.31 “Automated vehicle” is the term most commonly used for vehicles which are able to carry out the entire DDT. For example, the UK Government adopted the term “automated vehicle” in the Automated and Electric Vehicles Act 2018 and in its subsequent codes of practice.49 We hope that, in time, the term will become better understood.
-
2.32 We do not recommend use of the term “autonomous” in legislation. Philosophers use the term to refer to acting in according with “reasons, values, or desires that are authentically one's own”. 50Vehicles do not have values or desires of their own, so describing them as “autonomous” may be unduly anthropomorphic. On a more practical level it may also underestimate the degree to which vehicles with no humans in the driving seat may still rely on human assistants in remote operation centres, as discussed in Chapter 9.
-
2.33 However, unlike the SAE, we do not “deprecate” use of the term “autonomous”. 51We have adopted terms such as “self-driving” which allow us to make legal distinctions without undue confusion. However, we accept that we are at the beginning of a long road in understanding driving automation, and how to communicate its many nuances to the public. The fact that a word is used in statute should not prevent other attempts to communicate. One particular suggestion is that self-driving status may be indicated by a logo, or kite mark or even a colour.52
“Road or other public place”
-
2.34 Our recommendations apply to the use of AVs on roads or other public places in Great Britain. The terms “road” and “other public place” are widely used in road traffic legislation. 53They have been interpreted many times by the courts, both in England and Wales and in Scotland. In Consultation Paper 3, we looked in detail at this case law.54
-
2.35 Essentially a road is a way by which travellers may move from place A to place B and to which the public have access. 55Access is not simply about motorised access: if, for example, members of the public are allowed to go for a walk or exercise their dogs on a university campus road, that road falls within road traffic legislation. 56Furthermore, the public do not necessarily have to have a clear right to use the road, provided that they do use it as a matter of fact and that use is permitted, either expressly or implicitly.57
-
2.36 Similarly, a public place is a place which is actually used by the general public, without objection by the landowner or occupier. 58So, for example, where a car park is open to the public, the marked lanes used to reach bays are “roads”, while the bays themselves are “other public places”.
The challenges of open access
-
2.37 Our recommendations do not apply to restricted environments, such as private car parks, ports, quarries or warehouses. For these restricted environments, the Health and Safety at Work etc Act 1974 and occupiers’ liability appear to provide a sufficient legal framework. By contrast, places which allow public access are considerably more challenging for AVs and require new forms of regulation.
-
2.38 As we said in Consultation Paper 3, roads may be used by many people, in different ways, for different purposes, at the same time. This leads to a complex environment, with an almost infinite number of scenarios, not all of which are controlled by clear rules. At a political level, competing public pressures lead to constant readjustment of how road space is allocated, whether through new junction layouts, wider pavements, new bus or cycle lanes or changes to the Highway Code. From 2016 to 2019, the Highway Code was changed 14 times. Further major changes to prioritise vulnerable road users will be introduced on 29 January 2022 if approved by Parliament.59 Traditional systems of vehicle approval focus on assessing vehicles before they are placed on the road. However, the frequent changes to road rules mean that AVs will require much greater monitoring while they are in use to ensure they can deal with (changing) road rules.
-
2.39 We have worked on the assumption that all road users who currently have access to roads will continue to do so. We do not propose that any existing road users should have their freedom to use the road restricted to make way for AVs.
THREE NEW LEGAL ACTORS
-
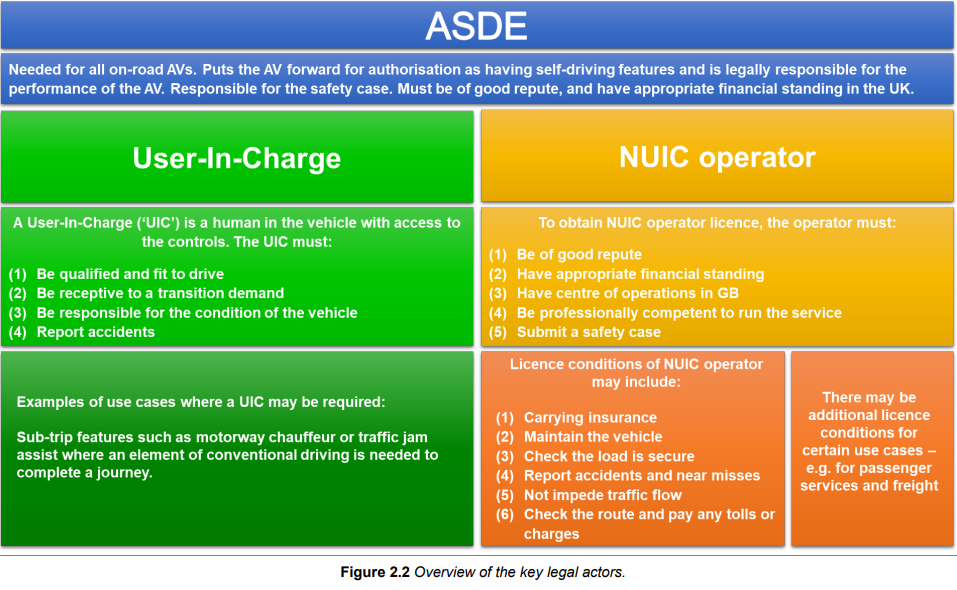
2.40 At present, most legal responsibilities for driving fall on a human driver. In the absence of a driver, these responsibilities need to be fulfilled in other ways. In this report, we recommend three new legal actors. We refer to these as the Authorised Self-Driving Entity (ASDE), the user-in-charge and the NUIC operator.
Authorised Self-Driving Entity (ASDE)
-
2.41 An ASDE is the vehicle manufacturer or software developer who puts an AV forward for authorisation as having self-driving features. The ASDE must register with the authorisation authority60 as the first point of contact if things go wrong. Our proposals retain some flexibility over the identity of the ASDE: it may be a vehicle manufacturer, or a software developer, or a partnership between the two. However, the ASDE must show that it was closely involved in assessing the safety of the vehicle. It must also have sufficient funds to respond to regulatory action and to organise a recall.61
-
2.42 The ASDE will be responsible for vehicles which are driving themselves on GB roads. Problems will be reported to the in-use regulator. The aim of the in-use regulator is to promote learning from mistakes and make improvements for the future. It will have power to apply a range of regulatory sanctions to the ASDE for breach of road rules, including compliance notices and civil penalties.
-
2.43 In Consultation Paper 3 we referred to the entity that puts an AV forward for authorisation as the Automated Driving System Entity or ADSE. Consultees pointed out that this was the wrong name: the entity should not simply take responsibility for the automated driving system (ADS) but for the safety of the vehicle as a whole. Consultees told us that it was not possible to distinguish the safety of the system from the safety of the vehicle. In the light of consultees’ concerns, we have changed the name. We have therefore replaced the old term, Automated Driving System Entity (ADSE), with the new term, Authorised Self-Driving Entity (ASDE). For the sake of simplicity, we refer to an ASDE throughout this report, even where we report on previous consultations that used the earlier term.
The user-in-charge
-
2.44 The user-in-charge can be thought of as a human in the driving seat while a vehicle is driving itself. We define a user-in-charge as an individual who is in the vehicle and in a position to operate the driving controls while an ADS feature is engaged. 62We recommend that every self-driving vehicle should have a user-in-charge, unless the ADS feature is specifically authorised for use with no user-in-charge.
-
2.45 The user-in-charge must be qualified and fit to drive, as they may be called on to take over driving if the ADS issues a transition demand. While the ADS feature is engaged, the user-in-charge is not responsible for dynamic driving. They do not control the vehicle through steering, accelerating or braking, and do not need to monitor the driving environment.63 They cannot be held liable for criminal offences which arise from these activities.
-
2.46 However, a user-in-charge does retain other driver responsibilities. Like a driver, a user-in-charge must (for example) insure the vehicle and check that any load is secure before they set off. During a journey they must ensure that any children in the vehicle are wearing their seatbelts. Following an accident, they should exchange insurance details and report the matter to the police in accordance with section 170 of the Road Traffic Act 1988. They are also required to pay any tolls and charges and check that the vehicle is legally parked before they leave it.
The NUIC operator
-
2.47 Some features will be authorised for use without a user-in-charge. We refer to these as “No User-In-Charge” (NUIC) features. We recommend that when a NUIC feature is engaged on a road or other public place, the vehicle is overseen by a licensed NUIC operator.
-
2.48 A licensed NUIC operator is an organisation rather than an individual. It will need to meet rigorous competence requirements, as discussed in Chapter 9. While a NUIC feature is engaged, the operator will be required to have “oversight” of the vehicle. This does not mean that they need to monitor the driving environment. If a driving automation system requires an individual to monitor the driving vehicle, it is not selfdriving but is simply being driven remotely. However, NUIC operator staff will be expected to respond to alerts from the vehicle if it encounters a problem it cannot deal with, or if it is involved in a collision. The SAE Taxonomy refers to these functions as “remote assistance” and “fleet operations”. 64It is not absolutely essential that this is done remotely through screens. It is possible that staff might be physically present in a limited area, such as a car park. However, we anticipate that in the great majority of cases, a NUIC operator will employ staff in a remote operations centre, with the many challenges this involves.
-
2.49 The ASDE and NUIC operator could be the same organisation, as where a manufacturer or developer also provides a passenger service. If so, it may submit a combined safety case to the authorisation authority and obtain both ASDE status and a NUIC operator licence at the same time. However, it will also be possible for the two roles to be carried out by different entities.
-
2.50 The figure on the following page provides a brief overview of how these actors fit together.
ASDE
Needed for all on-road AVs. Puts the AV forward for authorisation as having self-driving features and is legally responsible for the performance of the AV. Responsible for the safety case. Must be of good repute, and have appropriate financial standing in the UK.
NEW REGULATORY SCHEMES
The Secretary of State’s safety standard
-
2.52 In Chapter 4 we consider the standard of safety that AVs should reach before being deployed on roads and other public places. We note a range of views, from those who think that it is sufficient for AVs to be marginally safer than average human drivers, to those who think that AVs should be considerably safer.
-
2.53 We conclude that the issue is one for political judgement. We recommend that legislation should require the Secretary of State for Transport to publish a safety standard against which the safety of AVs can be measured. This standard should include a comparison with human drivers. In exercising their functions, the authorisation agency and in-use regulator should have regard to the published standard.
Approval and authorisation as self-driving
Approval
-
2.54 As with all road vehicles, an AV will be required to receive approval before it can be registered. Typically, approval involves separate approvals for systems and components followed by whole vehicle approval, for the vehicle as a whole. Approval can be given to a “type” of vehicle so that it can be produced in a small or an unlimited series. Alternatively, the UK also operates a scheme to approve individual vehicles.
-
2.55 Following the UK’s departure from the EU, Great Britain acquired more control over the way in which vehicles are approved. In this report, we recommend that manufacturers who wish to include an ADS in their vehicles should have a choice. They may obtain systems approval at international level, in accordance with a UNECE regulation, from any UNECE approval authority. Alternatively, they can apply for domestic approval under a new domestic AV technical approval scheme. In either case, the whole vehicle will need to receive the new GB whole vehicle approval that has replaced EU whole vehicle approval for most motor vehicles.65
-
2.56 Once a vehicle has been approved, it may be placed on the market, but it is not authorised to drive itself. We recommend that, before a vehicle is regarded as selfdriving, it should undergo a second “authorisation” stage.
Authorisation
-
2.57 Authorisation is new. While national or international vehicle approval is largely concerned with technical issues (verifying and validating systems against specifications), the authorisation decision considers the vehicle and its manufacturer or developer more widely.
-
2.58 The authorisation authority will assess whether a vehicle has ADS features which reach the threshold for self-driving recommended in Chapter 3. The authorisation authority must be satisfied that each specified ADS feature can control the vehicle so as to drive safely and legally, even if an individual is not monitoring the driving environment, the vehicle or the way that it drives. The authorisation authority must decide whether the ASDE has sufficient skill and financial resources to keep the vehicle up-to-date and compliant with traffic laws in Great Britain and deal with any problems that arise.
-
2.59 Once the authorisation authority is satisfied that all is in order, it will do three things. First, it will authorise the vehicle as a whole as equipped with an ADS feature capable of self-driving. Secondly, it will specify each ADS feature within the vehicle, describe the ODD and prescribe whether it can be used with or without a user-in-charge. Thirdly, it will register an entity as the ASDE.
-
2.60 Consultees stressed to us that one cannot look at an ADS in isolation. An ADS is only safe if it is embedded safely within a vehicle. Under our scheme it is the vehicle that is authorised, not the ADS. However, it would be wrong to describe a vehicle as “selfdriving” if it can only drive itself in limited ODDs. In most cases it will be the ADS feature, rather than the vehicle, which is self-driving. Under our scheme, a vehicle will be authorised as having self-driving features.
-
2.61 The legislation will not name a specific organisation as the authorisation authority. As is common with road traffic legislation, the regulatory powers will be exercised, and duties performed, in the name of the Secretary of State for Transport and allocated to an appropriate Department for Transport agency. However, we would envisage that initially the authorisation authority would be the Vehicle Certification Agency (VCA), which currently grants GB type approval.
In-use safety regulation
-
2.62 Throughout this project, we have emphasised the importance of on-going safety assurance for AVs. With changes to road rules and the driving environment, and updates to available software and technology, AVs will require continuous regulatory oversight to assure that they achieve a suitable standard of safety throughout their lifetime.
-
2.63 To support this, we recommend that legislation creates the new role of an in-use safety regulator, with a new set of statutory powers and responsibilities. The overall objective of the regulator is to ensure the continuing safety and legal compliance of self-driving vehicles while they are in-use by learning from mistakes and preventing their re-occurrence. To this end it will:
-
(1) evaluate the safety of automated driving compared with conventional driving;
-
(2) investigate road traffic infractions; and
-
(3) ensure that ASDEs provide sufficient information to users.
-
2.64 These responsibilities will be supported by powers to apply regulatory sanctions, including informal and formal warnings, compliances orders, civil penalties and in extreme cases, suspension or withdrawal of authorisation.
-
2.65 Again, the legislation will not name a specific organisation: the powers and duties will be exercised in the name of the Secretary of State for Transport. However, we would envisage that initially the in-use safety regulator would be the Driver and Vehicle Standards Agency (DVSA), which (among other things) is currently responsible for market surveillance and vehicle recalls.
NUIC operator licensing
-
2.66 Where a vehicle drives itself with no user-in-charge, considerable responsibilities will fall on the operator. To obtain a licence, a NUIC operator will need to submit a safety case to show how it will operate vehicles safely without a user-in-charge or driver. It will need to demonstrate how it will maintain connectivity; provide suitable equipment; train and supervise staff; and combat problems of boredom and inattention.
-
2.67 Initially, we anticipate that an ASDE may wish to operate its own vehicles. We have therefore designed a system where the ASDE and NUIC operator roles can be combined without undue bureaucratic duplication. We recommend that where the ADSE and NUIC operator are the same entity, the entity may submit a joint safety case to be assessed by the authorisation authority. It will also be possible for the NUIC operator to be separate from the ASDE. If so, the ASDE will need to set out what is required for the safe operation of its vehicles, and the NUIC operator will need to show how it meets the operational requirements.
A NEW AUTOMATED VEHICLE ACT
-
2.68 The introduction of automated vehicles will have profound legal consequences. As we have discussed, it requires new regulatory schemes and new actors (with new responsibilities and liabilities). We therefore recommend primary legislation - a new Automated Vehicles Act - to regulate automated vehicle on roads or other public places in Great Britain.
Devolution
-
2.69 Our current assumption is that any new legislation would be enacted by the UK Parliament in Westminster. The great majority of our recommendations fall within legislative competence reserved to the UK Parliament under the Scotland Act 1998 and the Government of Wales Act 2006. However, a small number of them fall within devolved competence, and the UK Parliament will not normally legislate for devolved matters without the consent of the devolved legislatures.66 Thus the legislative competences of the Scottish and Welsh legislatures will need to be given careful consideration.
-
2.70 Under the Scotland Act 1998, various transport matters are reserved to the UK Parliament, including the subject matter of the Road Traffic Act 1988 67and the Road Traffic Offenders Act 1988. 68Matters concerned with approval are also reserved.69 Other matters are not reserved, and are within the competence of the Scottish Parliament. This includes the law of delict 70and criminal offences other than those contained in reserved road traffic legislation. 71In the field of passenger transport, public service vehicle (PSV) operator licensing is reserved, 72while taxi and private hire licensing are within the competence of the Scottish Parliament.
-
2.71 Following the Wales Act 2017, the Welsh Parliament (the Senedd) is now able to pass legislation that does not relate to a matter reserved to the UK Parliament. Reserved matters relating to road transport include: regulation of the construction of motor vehicles; regulation of the use of vehicles; road traffic offences; driver licensing; and insurance of motor vehicles.73 Again, PSV operator licensing is reserved,74 while taxi and private hire licensing are within the competence of the Senedd.
-
2.72 Our remit does not extend to Northern Ireland: we can only make recommendations in respect of England, Wales and Scotland. The law of Northern Ireland is subject to the Protocol on Ireland/Northern Ireland and will require a different system of regulation.
The need for a joint approach
-
2.73 The new Act will cover a mix of both reserved and devolved issues, and dividing line between the two is not always clear cut. For example, in Chapter 8 we recommend that the user-in-charge should have an immunity from road traffic offences and civil penalties which arise from dynamic driving. Some of this immunity will relate to reserved offences, but not all.
-
2.74 For example, in Scotland, the immunity will be a reserved matter if it applies to most offences in the Road Traffic Act 1988 75and in motorway regulations made under section 17 of the Road Traffic Regulation Act 1984. 76However, in Scotland, speed limits on motorways and the offence of failing to comply with road signs under section 36 of the Road Traffic Act 1988are devolved.77 Similarly, in Wales, civil penalties under the Part 6 of the Traffic Management Act 2004 are devolved. We do not think that the public would be able to understand different or partial immunities based on these distinctions.
-
2.75 It would be beneficial to have a uniform scheme that applies across Great Britain. We hope the UK, Scottish and Welsh governments will work together to introduce such a scheme.
Recommendation 1.
The UK, Scottish and Welsh governments should work together to introduce a uniform scheme that will apply across Great Britain.
OVERARCHING THEMES
-
2.77 Finally, we consider three issues that were raised throughout the project: equality, accessibility and data. These issues have multiple implications, for each of stage of the project. They arise both before and after deployment, and affect both user-in-charge and NUIC vehicles. Here we explain our approach to these “overarching” issues.
Equality
-
2.78 One concern about AVs is that they may redistribute risk from one group of road users to another. Even if AVs are safer overall, and lead to lower risk for some users (such as car occupants) the fear is that they might lead to higher risks for others (such as cyclists and pedestrians). Concern about unfair risk allocation is particularly acute if a group is adversely affected on the basis of race, sex, age, disability or other protected characteristics.78
-
2.79 The Equality Act 2010 prohibits imposing detriment on people on the basis of protected characteristics in various circumstances. Furthermore, regulators of AVs (as public authorities) are subject to the public sector equality duty. They must have due regard to eliminating discrimination and advancing equality of opportunity between persons who share a protected characteristic and persons who do not share it.79
-
2.80 In Consultation Paper 1 we cited several examples where bias has crept into the design of vehicles, or into the design of other automated systems. Air bags save many lives, but the first generation of air bags posed risks to smaller passengers, such as women of small stature, the elderly, and children, because they were developed with adult males in mind.80 Current facial recognition software may also exhibit a bias towards white, male faces. For non-white and non-male faces, the accuracy of facial recognition systems may decline significantly. 81
-
2.81 In the future, there are ways in which AVs might adversely affect protected groups, even if they reduce the risk for other groups. Systems may not have been trained to deal with the full variety of wheelchairs and mobility scooters; or they may struggle to recognise certain road user groups. These issues may be exacerbated if designers are drawn predominantly from one demographic group (such as young non-disabled men).82
Responses to Consultation Paper 3
-
2.82 In Consultation Paper 3 we asked consultees for practical suggestions on how AV regulators can fulfil their public sector equality duty. This question received 73 responses, covering a variety of themes.83
-
2.83 Many consultees said that the ASDE should be required to address equality issues in its safety case. Consultees also stressed the importance of ensuring a sufficient range of test scenarios. The Parliamentary Advisory Council for Transport Safety (PACTS) and TRL said that the ASDE should provide evidence that “pertinent safety testing has been undertaken with all relevant road user (dependent on ODD)”. Furthermore “AV sensors must be able to reliably and repeatably identify all pedestrians (regardless of age, ethnicity, gender, stature, speed of movement etc)”.
-
2.84 Similarly, the Royal Society for the Prevention of Accidents (RoSPA) said:
Before these vehicles can be used on Britain’s roads, there needs to be extensive testing to provide evidence that autonomous vehicles can identify individuals of all races and ethnicities in different daylight conditions, individuals wearing robes and skirts (if the system works by identifying leg movements) and individuals in different kinds of wheelchairs and mobility scooters.
This database could include data that helps ensure all groups are treated equally, e.g. by documenting types of religious or cultural clothing that AV developers may otherwise have been unaware of, or how road crossing behaviour of visually-impaired people aided by guide dogs may differ from 'typical' behaviour, such that these permutations are engineered for.
-
2.86 Another theme was that regulators should draw on existing expertise. Reed Mobility referred to the ethical principles published by the European Commission. 84The RAC Foundation mentioned other studies of organisational bias. 85Meanwhile, the Equality and Human Rights Commission highlighted the need to comply with “the domestic (Equality Act 2010) and international (Convention on the Rights of Persons with Disabilities) frameworks”.
-
2.87 Guide Dogs UK said that “the best safeguard against unconscious bias” which could disadvantage people with sight loss would be to involve them early in the process. Several other respondents mentioned the need to consult a wide range of road users or work with vulnerable groups through an advisory group.
Embedding equality within our recommendations
-
2.88 Under section 149 of the Equalities Act 2010, public regulators must already comply with the public sector equality duty. As this is already part of the law, we do not make recommendations for new laws to this effect.
-
2.89 Regulators will need to consider equality issues at each stage of the process. In Chapter 5 we highlight that when the authorisation authority considers whether a vehicle can safely drive itself it will need to consider the safety of all road users. To this end, an ASDE will be required to submit an equality impact assessment alongside their safety case. We also agree that there is a need to consult different road user groups. In Chapter 6 we propose a forum where AV regulators and different road user groups can exchange views regularly.
Accessibility
-
2.90 At present, disabled people travel less than the rest of the population. As noted in the London Mayor’s Transport Strategy, “disabled people, who currently make up 14 per cent of London’s population, on average make one third fewer trips than non-disabled Londoners”.86 When disabled people do travel, they are more dependent on taxis and private hire services.87 The cost of these trips is a particular burden for those on low incomes.
-
2.91 Accessibility issues are partly about equality: AVs should not disadvantage people by reason of disability. However, it is also about seizing the opportunity. One of the main advantages of AVs is their potential to make life better for those with disabilities. They provide hope to people currently unable to drive that they may be able to own a car. They also have the potential to offer new forms of on-demand services. To fulfil this potential, AVs need to be developed, designed and introduced with the needs of disabled people in mind.
Responses to Consultation Paper 3
-
2.92 In the Consultation Paper 3 we pointed out that hearing loss affects around 11 million people in the UK, or one in six of the population. 88At present, this does not affect the ability to drive a car.89 We expressed concern that transition demands might rely on auditory warnings, making self-driving inaccessible for drivers with hearing impairments. We sought views.
-
2.93 The overwhelming majority of respondents said that self-driving features should be designed to be used by people with hearing impairments and other disabilities. Respondents noted that AVs have the potential to bring significant benefits to those with disabilities. As Oxbotica put it:
Accessibility should be one of the benefits that AV technologies can offer. People with hearing loss who are currently able to drive normal vehicles should find AVs an attractive alternative which will help to reduce the workload and which will introduce alert mechanisms that are adapted to their needs.
-
2.94 Pinsent Masons suggested that over time, a legal obligation could be introduced to ensure that automated vehicles are designed in a way which is accessible for all.
-
2.95 The Mobility and Access Committee for Scotland (MACS) and the Disabled Persons Transport Advisory Committee (DPTAC) both highlighted the position of disabled drivers who have adaptations for their vehicles. Adaptations can include:
steering wheel adaptations and or the ability to drive using only hand controls or while seated in their own wheelchairs.
Embedding accessibility within our recommendations
-
2.97 The needs of people with disabilities should be considered both in the design of vehicles and in the design of passenger services. In Chapter 3, we recommend that transition demands should including haptic as well as auditory signals. In Chapter 9 we recommend that trials of automated passenger services should only be granted a permit if they involve older and disabled passengers in their design.
-
2.98 However, we are only at the beginning of the process of using automated driving technology to improve accessibility. We agree with DPTAC that further research is needed to provide an evidence-base for more specific recommendations on AVs and disability.
Data
-
2.99 Most issues of “data protection and privacy” are outside our terms of reference. However, in some cases access to data is integral to our proposals. In Consultation Paper 3 we listed instances where our proposals relied on access to the appropriate data. In particular, the police will need to know whether an ADS was engaged at the time of any incident involving an AV. Similarly, insurers need to know whether the vehicle was present at the alleged time and place, whether the ADS was engaged and how the incident occurred. We are keen to ensure that the required information is available.
Current EU and UNECE initiatives
-
2.100 In Consultation Paper 3 we explained that AVs generate huge quantities of data - so considerable data may be recorded. However, under current EU and UNECE initiatives, very little data must be recorded.
-
2.101 As from July 2022, both conventional and automated vehicles sold in the EU will need to be equipped with event data recorders (EDRs). 90EDRs aim to provide data to help analyse patterns of collisions. However, under the current state of technology, EDRs will not record collisions between a vehicle and something of much lower mass, such as a motorcycle or pedestrian. Furthermore, as currently conceived, EDRs will not record details of individual vehicles. They cannot be used to investigate individual incidents.
-
2.102 AVs will need to store more data than are captured by EDRs alone. They will therefore need a second system of data capture. UN Regulation 157 on Automated Lane Keeping Systems (the ALKS Regulation) refers to this as a Data Storage System for Automated Vehicles (or DSSAD). 91The ALKS Regulation sets requirements for what a DSSAD must record. It must record each time an ALKS is activated or deactivated or issues a transition demand (together with a date and time stamp). It must also record when the vehicle is involved in a detected collision. However, at present, there are no requirements about which collisions should be detected. Initially, collision detection systems in ALKS are likely to be similar to those in conventional cars, so may not record collisions with vulnerable road users.
2.103 For each of the recorded elements, the DSSAD must record “at least” a date and time stamp. Although technically feasible, the DSSAD is not required to record location.
Data issues in this report
2.104 In Consultation Paper 3 we looked at the bare minimum of data that would be needed to make our proposals work. We concluded that the DSSAD (or other data storage system) would need to record location data. This proposal was strongly supported by consultees 92and now forms part of our recommendations.93
2.105 We also proposed that ASDEs should be under a legal duty to disclose information to insurers that is necessary to decide claims fairly and accurately. Again, the great majority of respondents agreed with us94 and it now forms part of our recommendations.95
Data issues not addressed in this report
2.106 However, many data issues are not addressed in this report. Particular concerns have been expressed about the adequacy of current collision detection systems.96 We received a detailed response from the International Telecommunications Union Focus Group on AI for Autonomous and Assisted Driving (FG-AI4AD), which looked at this issue in depth. The response points out that, if an AV collided with a pedestrian in the absence of human witnesses, there would be no clear way of establishing what had happened.97
2.107 Where a collision is detected, data will be needed to understand what went wrong. Again, the data which AVs are currently required to collect is likely to prove inadequate. 98A study for British Standards Institute recommended that AVs should record “digital commentary driving” (DCD) data streams. Following an incident this would allow investigators to understand (among other things) what the ADS “saw”, how the object was classified, and what predictions the system made about its movements. It is argued that, without this data, it will be difficult to learn from the incident to make improvements for the future.99 Although this data might be available, it is not required.
2.108 There is considerable work still to be done in developing standards for data collection concerning collisions and other incidents. There are also complex issues about how best to protect data and preserve privacy. Data is an area where more work is needed.
Chapter 3: The line between driver assistance and self-driving
-
3.1 In this chapter we ask what is required for driving automation to cross the legal threshold from driver assistance to “self-driving”.
-
3.2 Why do we refer to “self-driving” and “driving itself” instead of other competing terms currently used in the public domain? “Driving itself” is a defined term in the Automated and Electric Vehicles Act 2018 (AEV Act) and we use this definition as our starting point. We have adopted a term that is not used in the SAE Taxonomy in order to remove the risk of confusion with other widely used terms, whose technical meaning may be slightly different. Our use of “self-driving” reflects the need for a legal term of art that has a precise meaning for legal rights and duties in Great Britain.
WHY THE LINE MATTERS
-
3.3 In our review, we have highlighted the conceptual leap from human driving to selfdriving. On one side of the line, technology to assist human drivers may be very advanced but still unable to deal with all situations. Instead, it relies on the human behind the wheel to monitor the vehicle and the driving environment, and to respond to events.
-
3.4 On the other side of the line, the vehicle is regarded as self-driving. The human in the driving seat (if any) may relax and divert their attention, knowing that they are not responsible for anything that happens while the automated driving system (ADS) is engaged. The ADS itself monitors the driving environment and responds to events.
-
3.5 Consultees expressed a strong desire for a clear bright line between systems which require attention and those that do not, to minimise the potential for confusion between the two. They drew our attention to the “problem of passivity”. 100A robust body of human factors research shows that people find it more difficult to monitor a task passively than to be actively engaged in it. 101Once their eyes and minds wander away from the road, they have little ability to respond appropriately to events such as an imminent collision. When drawing the line between driver support and self-driving, the law should take account of human factors research. The law should not make unrealistic demands of humans and their ability to notice events when their attention is elsewhere.
-
3.6 In technical terms, there is a continuum between the different levels of automation. A very good driver assistance feature may look similar to one that is self-driving. In legal terms, however, the difference is profound. This is because humans either pay attention or they do not. Once the person in the driving seat is told that they can divert their attention from the driving task, they cannot be held accountable for failing to notice problems. The law therefore requires a clear-cut distinction setting out when the user is no longer responsible for the dynamic driving task.
-
3.7 Under our recommendations, once a vehicle is authorised with self-driving ADS features, and a self-driving ADS feature is engaged, the system of legal accountability will change. In particular:
-
(1) For ADS features authorised for use with a user-in-charge, the person inside the vehicle with access to its controls becomes a “user-in-charge” rather than simply a “driver”. The user-in-charge cannot be prosecuted for offences which arise from the dynamic driving task. They will have immunity from a wide range of offences related to the way the vehicle drives, ranging from dangerous or careless driving, to exceeding the speed limit or running a red light.
-
(2) For ADS features authorised for use without a user-in-charge, any occupants of the vehicle will be mere passengers. As we explain in Chapter 9, a licensed NUIC operator will oversee the journey and may be responsible for maintaining the fleet. Again, however, the NUIC operator will not be criminally liable for offences arising out of the dynamic driving task.
-
(3) If the ADS feature caused the vehicle to drive in a way which would be criminal
if performed by a human driver, this would be dealt with as a regulatory matter. The issue would be resolved between the in-use regulator and the ASDE. The emphasis would be on understanding what happened and applying that learning to improve future safety.
-
(4) For purposes of civil liability, the provisions currently contained in Part 1 of the AEV Act would apply. Compensation for victims who suffer injury, or damage caused by a vehicle driving itself, would not be contingent on proving that anyone is at fault. Instead, the insurer would directly compensate the victim.
vehicle to be authorised as having self-driving features: it must be safe even if a human user is not monitoring the driving environment, the vehicle or the way it drives. There are two interlinked parts of this definition: first, the vehicle must be safe; second, it must not rely on human monitoring.
-
3.9 In this chapter we look at what it means to monitor the driving environment, the vehicle and the way it drives. We distinguish between “monitoring” and “receptivity” to a clear and timely transition demand. We consider criteria for clear and timely transition demands and the problems in remaining receptive to other events while the vehicle is driving itself. Subsequent chapters consider safety. In Chapter 4 we look at what it means for an AV to be “safe”; in Chapter 5 we recommend an initial safety approval and authorisation process. In Chapter 6 we consider safety while vehicles are in-use.
SELF-DRIVING AND MONITORING
The definition in the Automated and Electric Vehicles Act 2018
-
3.10 Under section 1 of the AEV Act, the Secretary of State must prepare a list of all motor vehicles that are (in the Secretary of State’s opinion) “designed or adapted to be capable, at least in some circumstances or situations, of safely driving themselves” and may be lawfully used on roads or other public places in Great Britain.
-
3.11 The AEV Act introduces a new form of civil liability by which an insurer becomes directly liable for accidents caused by a listed vehicle when “driving itself”. This in turn is defined as “operating in a mode in which it is not being controlled, and does not need to be monitored, by an individual”. 102The term “individual” refers to a human, or “natural person”, rather than a company or organisation.
-
3.12 This definition has been widely accepted. We think it is broadly correct. The concept of “control” in the AEV Act covers functions influencing and indicating the vehicle’s motion. 103However, the crucial issue is what it means for an individual not to “need to monitor” a vehicle.
“Monitoring” in the SAE Taxonomy
-
3.13 We introduced the SAE Taxonomy in Chapter 2, where we considered the definitions of “automated driving system” (ADS) and “dynamic driving task” (DDT). 104Importantly, the DDT consists not only of steering, braking and, signalling. It also involves monitoring the driving environment and responding to objects and events.105
-
3.14 The SAE Taxonomy describes monitoring as “involving real-time human or machine sensing and processing of data”.106 It discusses different forms of monitoring, of which three are relevant to the present discussion.107 The ADS may monitor:
-
(1) the driving environment;
-
(2) vehicle performance (looking for system failures such as a malfunctioning brake caliper or tyre blowout); and
-
(3) the way the ADS is performing the DDT (“ADS performance”).
-
3.15 Under the SAE Taxonomy, an ADS (rather than a human user) must monitor the environment and the way the ADS performs the DDT.108 However, at Level 3 (conditional automation) the user may be expected to notice evident vehicle failures.109
Our approach to monitoring in Consultation Paper 3
-
3.16 In Consultation Paper 3, we said that, to be considered as self-driving, an ADS feature should be responsible for all three aspects of monitoring. We provisionally proposed that a vehicle should not be regarded as self-driving if “with the ADS engaged, the user-in-charge needs to monitor the driving environment, the vehicle or the way it drives”.110
-
3.17 The great majority of consultees agreed that only systems which are safe without the need for human monitoring should be described as “self-driving” under our authorisation scheme. They pointed to the public confusion which arises from calling something self-driving when in fact it requires monitoring. This can lead users to overrely on the system and expose both users of AVs and other road participants to danger. The risk of over-reliance is made worse if the system fails “often enough to present a significantly elevated risk, but not often enough to keep the supervisor alert and engaged”. 111Furthermore, manufacturers need to know what to aim for if society is to unlock the productivity benefits that can be gained from allowing users to do other things. The law must ensure there is a clear commercial advantage to producing a vehicle that is safe without human monitoring.
Conclusion: an individual does not need to monitor
-
3.18 In the light of the responses we received, we have concluded that an ADS feature should only be regarded as self-driving if a human is not required to monitor the driving environment, the vehicle or the way that it drives. As we explain below, a user may be required to respond to a clear and timely transition demand. However, the user must not be relied on to respond to events in the absence of a transition demand.
RECEPTIVITY OF A USER-IN-CHARGE TO A TRANSITION DEMAND
Taxonomy illustrates the difference between monitoring and receptivity using an example:
A person who becomes aware of a fire alarm or a telephone ringing may not necessarily have been monitoring the fire alarm or the telephone.113
A logical and intuitive procedure to transfer the dynamic driving task (DDT) from the system (automated control) to the human driver (manual control). This request is given from the system to the human driver.115
-
3.21 A majority of consultees agreed that even if a user-in-charge is not monitoring the driving environment, they could nevertheless be expected to respond to a clear and timely transition demand. Many referred to the fact that systems are being designed to function in this way, and said that the law needs to respond to this functionality. Those that disagreed focused on what would happen if the user-in-charge failed to respond. They argued that a vehicle should only be considered to be driving itself if it was able to achieve a minimal risk condition if the human failed to respond.
REQUIREMENTS FOR TRANSITION DEMANDS
A clear, multi-sensory signal
-
3.23 In Consultation Paper 3, we provisionally proposed that transition demands should be multi-sensory, including haptic signals such as vibrations in addition to visual and audio alerts. It is important that transition demands can be received by the full range of people currently permitted to drive, including those who are deaf, Deaf 116or hearing impaired.
-
3.24 We noted that hearing impairments are common, affecting one in six of the population. 117They do not interfere with a person’s ability to drive a car, 118and should not prevent someone from acting as a user-in-charge in a car. 119Therefore, transition demands should include haptic signals that can be perceived by a person who cannot hear and who is not looking at the dashboard.
-
3.25 Consultees were unanimous that a person with a hearing impairment should also be able to act as a user-in-charge. Many pointed out that “accessibility should be one of the benefits that AV technologies can offer”. 120It would be perverse if systems that issue transition demands were accessible to a smaller group of users than conventional vehicles, with the result that some people who are currently licensed to drive a conventional vehicle could not act as a user-in-charge of an automated equivalent. We therefore recommend that transition demands should involve multi-sensory alerts.
Sufficient time to gain situational awareness
-
3.26 A transition demand must be “timely”: it must allow the user-in-charge sufficient time to regain situational awareness before taking over driving. The SAE Taxonomy imposes a similar requirement on “requests to intervene” in Level 3 systems. 121These must provide the user with “sufficient time... to respond appropriately”.122
-
3.27 The length of the period is legally significant. As we explain in Chapter 8, under our recommendations, the user-in-charge’s responsibility for performing the dynamic driving task would only arise after the end of the period.123
-
3.28 In Consultation Paper 3 we said that the time necessary to complete a transition demand would depend on many factors, “including the complexity of the driving environment, whether it is day or night, and how engaging the non-driving activity proves to be”. 124The ALKS Regulation provides for a minimum of 10 seconds, which we suggested provides a floor for the acceptable transition time for that use case. Following our consultation, in April 2021, the Department for Transport published a literature review which addressed this issue. 125It found that although some reviews have concluded that 10 seconds seems an adequate time budget, there is no single, accepted takeover time. Further research is needed.
-
3.29 Responses on this issue highlighted the uncertainty about how long people need to regain situational awareness. Sufficient time will vary depending on the external environment, the user’s alertness and their personal characteristics. It will also depend on the activities the user-in-charge is allowed to undertake. Bryan Reimer of MIT suggested that “sufficient” time should be computed in light of the typical permitted non-driving related activities (such as eating, texting or watching a film).
-
3.30 Some consultees queried whether taking over on the move could ever be safe, except with very long lead-in times (much more than 10 seconds). This is because of the fatigue that disengagement may cause and the risk of skill degradation as people do less driving. Conversely, others suggested the transition period should vary depending on the urgency of the situation, with shorter periods if there was the risk of harm to a vulnerable road user for example.
-
3.31 As yet, there is no agreed international standard on the length of a transition demand. German law defines highly and fully self-driving vehicles as having technology that:
Is able to indicate to the driver - by means of visible, audible, tactile or otherwise perceptible signal - the need to retake manual control of the vehicle with a sufficient time buffer before it returns control of the vehicle to the driver (emphasis added).126
The conditions under which the system sends a take-back request to the driver... the transition period [defined as a maximum duration] 127 and the procedures for informing the driver.128
in an effective manner with sufficient lead time for the driver to safely assume dynamic control provision of a safe, predictable transition process.129
-
3.34 We remain of the view that a transition demand must allow the user-in-charge sufficient time to regain situational awareness before taking over driving. However, given the many uncertainties and the absence of reliable evidence, we are not in a position to specify how long that period should be. Different times may be appropriate for different operational design domains.
-
3.35 The issue of an appropriate transition period will need to be considered as part of the authorisation stage (stage 2) described in Chapter 5. We would expect an ASDE to put forward a safety case showing why the transition demand provides sufficient time, and for that claim to be evaluated by the authorisation authority. As more information becomes available, we would expect the GB authorisation authority to issue guidance on this issue.130
The consequences of failing to take over control
-
3.36 One of the most controversial issues is how an ADS should be programmed to react if the user-in-charge fails to take back dynamic control. A substantial minority of consultees considered that an ADS feature should only be considered self-driving if, following a failed transition demand, it is able to reach a “minimal risk condition” by coming to a safe stop out of an active lane of traffic.131
Level 3 and 4 systems
-
3.37 The ability to achieve a “minimal risk condition” is often seen as the key dividing line between SAE Level 3 and SAE Level 4. Under the SAE Taxonomy, at Level 3, the human user is expected “to perform the fallback and achieve a minimal risk condition” if the ADS cannot continue vehicle operation.132 By contrast, at Level 4, the “ADS is capable of automatically performing DDT fallback, as well as achieving a minimal risk condition if a user does not resume performance of the DDT”.133
-
3.38 However, in Consultation Paper 3 we explained that from a regulatory perspective the division between Level 3 and Level 4 is far from clear cut. A minimal risk condition is described only in general terms, as “a stable, stopped condition” 134which reduces the risk of a crash. It may cover a range of scenarios:
It may entail automatically bringing the vehicle to a stop within its current travel path, or it may entail a more extensive maneuver designed to remove the vehicle from an active lane of traffic and/or to automatically return the vehicle to a dispatching facility.135
-
3.39 A minimal risk condition can therefore include “a stop within its current travel path”. It may look similar to a vehicle’s “failure mitigation strategy” - which is also described as “a controlled stop in path”.136
-
3.40 Under the SAE Taxonomy, a Level 3 system “may be capable of performing the DDT fallback and achieving a minimal risk condition under certain, limited conditions”.137 And even a Level 4 system may have to rely on a vehicle’s failure mitigation strategy in certain “rare, catastrophic failure conditions” such as loss of backup power or “incapacitation of the ADS’s computing capability”. 138Given these complexities, our recommendations do not attempt to distinguish between Level 3 and Level 4 systems.
The need to mitigate risk if the transition demand fails
-
3.41 We do not consider it is realistic to lay down a hard and fast rule that an ADS must always bring a vehicle to a safe, legal stop out of an active lane of traffic following a failed transition demand. With all-lane running on motorways, that would be to demand more of an ADS than of a human driver. It might also delay the advent of selfdriving for too long and deprive society of its potential benefits. Even the most sophisticated system will fail sometimes and may struggle to cope with the consequences of its own failure.
-
3.42 In our view, there should be two lines of defence against a failure to respond to a transition demand. First, the user-in-charge should be held responsible for driving at the end of the transition period whether or not they have taken control. In Chapter 8, we recommend that the user-in-charge’s immunity from criminal offences should stop at that point. 139Secondly, if the user-in-charge fails to take over, the ADS should carry out a sufficient risk mitigation manoeuvre. Regulators will need to consider what is sufficient, but we would expect that (at a minimum) the vehicle should come to a controlled stop in lane with its hazard lights flashing.
-
3.43 Regulators may decide that more is required. As all respondents highlighted, the system needs to be sufficiently safe, which includes what happens in the absence of human intervention. This does not mean the complete elimination of all risk. In some (rare) scenarios the stop achieved by the ADS may be illegal or entail an increased risk to other road users, though it may still be acceptable to regulators. However, as we discuss in Chapter 4, only systems that meet the expectations of being “safe enough” should get approval. This includes the regulator’s assessment of human factors aspects of transition demands and what occurs if the user-in-charge fails to respond.
-
3.44 We think the ASDE should, as part of its safety case, disclose data about the likelihood of users failing to take over. The safety case should include mitigations against this risk and what steps the ADS itself, and other vehicle systems, can perform if a failure occurs. Connectivity and infrastructure could also play a role, for example by closing a motorway lane immediately.140 We return to this issue in Chapter 5.
RESPONDING TO EVENTS IN THE ABSENCE OF A TRANSITION DEMAND
-
3.45 One difficult issue is the extent to which a user-in-charge should be expected to respond to events in the absence of a transition demand. In Consultation Paper 3 we noted suggestions that users should respond to a variety of events, including “evident failures”, “obvious circumstances”, “extraordinary external conditions” or emergency vehicles. We expressed concern about all these exceptions to the principle that users do not need to pay attention to the driving task when the system is engaged.
The SAE view: responding to system failures, such as a tyre blow-out
-
3.46 Under the SAE Taxonomy, at Level 3, a “fallback-ready user” is expected to be receptive to “DDT performance-relevant system failures” and respond appropriately.141 The SAE give the example of “a sudden tire blow-out, which causes the vehicle to handle very poorly”, giving the user “ample kinaesthetic feedback”. The user is expected to respond by “turning on the hazard lamps, and pulling the vehicle onto the closest road shoulder”.142
-
3.47 In Consultation Paper 3 we said that this expected too much from a user-in-charge.143 When faced with a tyre blow-out, even fully-engaged drivers often fail to remedy the situation. In the US, in 2019, 612 people were killed in incidents involving tyre blow outs. 144Drivers tend to panic by braking hard, even though this has been described as the “single worse thing you can do”.145 We feared that the tendency to panic and brake would be even more pronounced where the user-in-charge was not monitoring the driving environment but emerged from other activities to confront a hazard or emergency. We thought that an ADS would be in a better position than a user-in-charge to remedy the situation.
The German view: “obvious circumstances”
-
3.48 In Germany, modifications to the German Road Traffic Act 146permit the use of vehicles with highly and fully automated features that perform the dynamic driving task.147 The driver can divert their attention when such features are engaged, but must remain “wahrnehmungsbereit”, meaning ready to perceive. The driver must take over the driving task when prompted, or when they realise that they must do so because “obvious circumstances” show that the conditions for use are no longer met.
-
3.49 It is unclear what will be considered an “obvious circumstance”. When the amendments were being considered in the German Bundesrat, important road signs and inclement weather were cited as examples that might be considered obvious.148 In Consultation Paper 3 we pointed to the risk that a user-in-charge who was not concentrating would be unlikely to notice either a road sign or that the vehicle was not complying with it.
France and Australia: responding to emergency vehicles
-
3.50 In France, the recent Mobility Law applies to users of “partially automated vehicles” (defined in terms of SAE Level 3). It requires users to respond to traffic officers and “general interest” (that is, emergency) vehicles. When the ADS is engaged, users must:
remain in condition and in position to immediately perform a take-back in order to perform the manoeuvres incumbent upon them pursuant to the provisions of this Code, in order to:
-
(i) comply with an order to stop issued by an official or agent responsible for recording offences and bearing external and visible badges of their office;
-
(ii) comply with instructions given by traffic officers.
-
(iii) facilitate the passage of a general interest vehicle.
-
(iv) give way to a priority general interest vehicle.149
-
3.51 Again, if the user is not paying attention, it seems unrealistic to expect them “immediately” or “without delay” to take-back control in the absence of a transition demand. The provision appears to be mainly concerned with emergency vehicles: the driver is expected to hear sirens, even if they are not looking at the road. However, this may not be possible if the user has a hearing impairment, or if they are listening to loud music.
-
3.52 Australia’s National Transport Commission (NTC) has recommended a similar approach, stating that the fallback-ready-user must:
remain vigilant to respond to ADS requests, mechanical failure or emergency vehicles and regain control of the vehicle without undue delay when required.150
-
3.53 The Australian provision moderates the expectation on users, who are only expected to intervene without “undue” delay. What amounts to “undue” delay may be hard to assess, which is problematic if it has serious criminal consequences for individuals.
Our proposal in Consultation Paper 3
-
3.54 In Consultation Paper 3 we expressed “grave reservations” about all these examples.151 There is a danger that the list of external circumstances may be based on things the ADS cannot do rather than on things which the user can reasonably respond to when not monitoring the driving environment. Requirements to respond to external circumstances could be used to blame human users for failures within the ADS.152 We provisionally proposed that to be classified as self-driving, the ADS feature must be safe enough even if the human user does not intervene in response to any event except a clear and timely transition demand.
Consultation responses
-
3.55 The great majority of consultees agreed that users-in-charge should not need to react to anything other than a transition demand. Some stakeholders highlighted the incompatibility of conducting non-driving-related activities with noticing “extraordinary external conditions” such as low impact collisions and emergency vehicles. Others noted that the ADS is better placed to respond to emergency situations than an out-of-the-loop user.
-
3.56 The Society of Motor Manufacturers and Traders agreed with the proposal in principle but warned against “stretching expectations to unrealistic levels”. They gave the example of a small fire within the vehicle that may not immediately affect the ADS but which the user-in-charge should react to. Responding to a fire within the vehicle is not part of the dynamic driving task. 153We therefore accept that the user-in-charge (and other passengers) should respond appropriately. We do not think that it undermines the principle that a user-in-charge is not responsible for exercising dynamic control of the vehicle in response to anything other than a transition demand.
Conclusion: no requirement to respond without a transition demand
-
3.57 In our view, to be classified as self-driving, an ADS feature must meet the criteria prescribed as part of the safety authorisation process. It must be found to be safe enough even if the human user does not intervene in response to any event except a clear and timely transition demand. 154This does not mean that the ADS feature must be able to deal with absolutely everything. Some events, such as a meteor strike or a plane landing on the motorway, are so unlikely that they do not need to be considered.155
-
3.58 However, in the early stages of automated driving, there may be many relatively common events which the ADS cannot handle, from floods to emergency vehicles. In these cases, the ADS will need to recognise that it is outside its ODD and issue a transition demand. An ADS feature should not be considered as self-driving if it relies on a disengaged user-in-charge to notice such events in the absence of a transition demand.
THE MONITORING TEST FOR VEHICLES WITHOUT A USER-IN-CHARGE
-
3.59 In Consultation Paper 3, we said that a user-in-charge feature should not be considered self-driving if an individual needs to monitor the driving environment, the vehicle or the way that it drives. We asked whether the same test should apply where the vehicle does not have a user-in-charge but relies on remote assistance from the staff of a licensed operator.
-
3.60 We pointed to two broad ways that remote operation might work. In the first, a human would be in a position to step in and exert longitudinal and lateral control of the vehicle - to steer or brake remotely in real time. In the second, the human would provide assistance and high-level commands, but have no direct control of the vehicle.
-
3.61 We said that remote steering and braking was “remote driving”, not “self-driving”. This attracted overwhelming support from respondents. We then said that “remote assistance”, where humans do not need to react to potential hazards in real time, would not prevent the vehicle being “self-driving”. However, we pointed to a possible grey area where a remote assistant is not steering or braking but might be still be monitoring the vehicle by keeping an eye on how it is moving and its surroundings through the screen. We provisionally concluded that such systems should be seen as self-driving.
-
3.62 This proved controversial. A significant minority of consultees thought that the threshold for self-driving should be the same whether an individual is in or out of the vehicle. They said it was counter-intuitive that under our proposals, human monitoring from within a vehicle would be outside the “self-driving” definition, whereas remote human monitoring would be included.
-
3.63 Several developers drew a distinction between real-time monitoring (with a view to taking over dynamic driving in an emergency) and “remote assistance”. It was said that a vehicle which requires monitoring with a view to emergency human intervention was not driving itself. Instead, it was being remotely driven. However, consultees explained that remote assistants would not monitor the vehicle but would be receptive to alerts, in the same way that a user-in-charge is receptive to a transition demand. Assistants would help the vehicle to identify unexpected objects or would sign-off manoeuvres that require human judgement. For example, an assistant might check through on-board cameras to see if was safe to allow the vehicle to mount the pavement at low speed to let an emergency vehicle through. Any monitoring of the vehicle or driving environment undertaken by remote assistants would supplement that undertaken by the ADS itself and not be safety-critical.
-
3.64 We have been persuaded that the test for self-driving should be the same for both user-in-charge and no user-in-charge ADS features. It should not depend on whether the monitoring of the vehicle is from within or outside the vehicle. However, the practicalities of alerts and transitions between driving and self-driving will be different in a remote setting. We consider vehicles which rely on remote assistance in Chapter 9.
RECOMMENDATION: WRITING THE THRESHOLD FOR SELF-DRIVING INTO LAW
-
3.65 In Chapter 2 we recommended that a new Automated Vehicles Act should be introduced. The new Act should, among other things, set the threshold for self-driving. Before the authorisation authority can authorise a vehicle as having self-driving ADS features, it must be satisfied that the following test is met. Each specified ADS feature must be able to control the vehicle so as to drive safely and legally, even if an individual is not monitoring the driving environment, the vehicle or the way that it drives. This test should apply to all ADS features, whether or not they require a userin-charge.
-
3.66 For user-in-charge vehicles, the test is compatible with requiring the user-in-charge to be receptive to a transition demand, provided that the transition demand meets the criteria we have outlined. It must issue clear, multi-sensory signals and give the userin-charge sufficient time to gain situational awareness. If the user-in-charge fails to take over, it must also mitigate against the risk of a crash by (at least) bringing the vehicle to a controlled stop. However, the test should not be satisfied if the ADS requires the user-in-charge to respond to objects or events in the external environment in the absence of a transition demand.156
Recommendation 2.
For a feature to be self-driving, the authorisation authority must be satisfied that it can control the vehicle so as to drive safely and legally, even if an individual is not monitoring the driving environment, the vehicle or the way that it drives.
Vehicles that rely on ADS features to issue transition demands to users-in-charge may be authorised as self-driving provided that the transition demand:
-
(1) issues clear, multi-sensory signals;
-
(2) gives the user-in-charge sufficient time to gain situational awareness before the end of the transition period; and
-
(3) has sufficient mitigation against the risk of a injury or damage if the user-in-charge fails to take over in response to the demand.
Vehicles should not be authorised as self-driving if an individual is expected to respond to objects or events in the external environment (such as low impact collisions and emergency vehicles) in the absence of a transition demand.
PERMITTED ACTIVITIES FOR THE USER-IN-CHARGE
-
3.68 The status of “user-in-charge” highlights that when the ADS is engaged, the human user is not responsible for the dynamic driving task. It follows that they should be allowed to engage in non-driving-related activities. However, there are limits to what the user-in-charge can be allowed to do. The user-in-charge must be ready and able to take over the dynamic driving task when the system issues a transition demand. The draft UNECE resolution on safety considerations for activities other than driving says users should
Maintain physical and mental skills to safely exercise dynamic control of the vehicle... [and]
Refrain from activity other than driving if that activity may impede this response or is unsafe.. 157
-
3.69 The draft UNECE resolution highlights the respective roles of users, industry and regulators in setting the boundaries of what users of AVs that issue transition demands should be allowed to do. Public education and provision of information about the safe use of systems which applies across all groups:
Users should... Comply with applicable laws, including when performing activities other than driving. Prior to any road use, drivers should familiarise themselves with how to operate the vehicle and the requirements regarding activities other than driving.
Manufacturers should. Inform and educate drivers about their role in the safe operation of the vehicle. Refrain from misleading names, descriptions, or marketing that could encourage improper use of the automated driving system. and consider additional measures, as appropriate to ensure proper use of the automated driving system...
Contracting parties should... Consider appropriate domestic measures to address activity other than driving. and. the roles of driver education and driver testing in ensuring that drivers have the skills and knowledge necessary to manage the demands of new technologies.158
-
3.70 Here we focus on the role of the state (in UNECE terms, “contracting parties”). We think regulators should give guidance about which activities are compatible with the use of ADS features and which are not. They also need to promote public education on the issue.
-
3.71 Secondary activities may vary depending on the ADS feature involved. As we have seen, consultees commented that the length of the transition period and the nature of secondary activities are linked. More immersive activities will take longer to emerge from than less cognitively intense ones.
-
3.72 The novelty of this technology and the drive for innovation mean that different developers’ systems will vary significantly in capability and human-machine interfaces (as they already do today in respect of driver support systems). However, we think some standardisation is essential. For every manufacturer to set their own list of permitted tasks would be a recipe for public confusion and risks compromising, rather than enhancing, road safety. The joint response from the Association of British Insurers (ABI) and Thatcham Research suggested that there should be a specific list of permitted tasks. We think regulators will need to work with manufacturers to provide a standard list of activities for each type of feature.
Guidance in the Highway Code
-
3.73 In our view, the Highway Code should set out guidance on permitted activities. For example, this could take the form of two lists: one of acceptable activities and one of unacceptable activities. It could not include every possible activity a user-in-charge might think of, but it should provide a good indication of what a user-in-charge can safely do. As many drivers do not read the Highway Code after taking their test, 159the Government should take steps to publicise its guidance on permitted activities.
Prohibited activities
-
3.74 Although the courts have regard to the Highway Code, failures to observe it do not in themselves constitute a criminal offence. 160We have considered whether any particular activities should be illegal. In response to both Consultation Papers 1 and 3, consultees expressed particular concerns about two common activities: mobile phone use (and screens more generally) 161and sleeping. For these two activities we recommend a cautious initial approach.
-
3.75 The current law on mobile phone and screen use is set out in Road Vehicles (Construction and Use) Regulations 1986. Under regulation 110, drivers are prohibited from using a handheld telephone or other handheld device except in response to a genuine emergency. 162Under regulation 109, drivers are also prohibited from being in a position to see a non-handheld screen displaying anything other than information related to driving or route finding.163
-
3.76 Many self-driving features are designed to enable a user-in-charge to use on-board screens for other purposes (such as checking email), on the basis that the screen cuts out at the start of the transition demand.164This is one of the selling points of selfdriving features: we anticipate that regulation 109 will be amended by secondary legislation to allow the use of fixed screens which cut out on a transition demand.
-
3.77 However, for now, we recommend that the other prohibitions on the use of mobile phones and screens should apply to users-in-charge as well as drivers. In other words, regulation 109 and 110 should continue to apply to a user-in-charge to prevent the use of a mobile phone, or the use of a screen which does not cut out on a transition demand. Until we know more about how users-in-charge will react to transition demands, we think it is prudent to prevent undue distraction. The regulations can be amended in the future as more evidence of driver behaviour and capacity in relation to new technology becomes available.
-
3.78 Similar considerations apply to sleeping. We think that it should be an offence to sleep while being a user-in-charge: users should remain receptive to transition demands.
-
3.79 This does not require primary legislation. A prohibition on sleeping can be introduced in secondary legislation, through the construction and use regulations. 165In time, as systems improve, offences of sleeping and screen use may no longer be necessary: if so, they could also be removed by secondary legislation.
Recommendation 3.
Recommendation 4.
-
(1) to use a mobile device (contrary to regulations 110 of the Road Vehicles (Construction and Use) Regulations 1986);
-
(2) to be in a position to see a non-handheld screen (contrary to regulations 109 of the Road Vehicles (Construction and Use) Regulations 1986) unless the screen cuts out at the start of a transition demand; and
-
(3) to sleep.
PREVENTING DANGEROUS INTERVENTIONS BY THE USER-IN-CHARGE
-
3.82 Several responses highlighted the importance of having a clear “offer and confirm” process for transition demands, as advocated by the ABI and Thatcham in their 2019 report on defining safe automated driving.166 Consultees were concerned that the user-in-charge may intervene unnecessarily, or without sufficient thought.
-
3.83 A requirement for “offer and confirm” procedures is consistent with recommendations included in the UNECE’s draft resolution on safety considerations for activities other than driving. The resolution states that automated driving systems (ADS) should continue exercising dynamic control until the driver has “intentionally” taken control of the vehicle and should verify that the driver is in fact exercising dynamic control at the end of a transition. 167It also states that ADS issuing transition demands should “monitor whether the driver is ready and able to respond to a transition demand”.168
The issue is not confined to transition demands. If a driver’s steering input or acceleration occurs when they are not looking at the road, they may not intend to take over driving. So, although monitoring for driver attentiveness is a distinct issue, it is closely related to preventing unintentional take-overs.
-
3.84 In our view, preventing dangerous or unwitting take-overs should be addressed as part of the initial approval scheme (whether at UNECE or domestic level). For example, regulators might require user attentiveness devices to verify appropriate gaze direction and head movement. Systems could also monitor that any driver input to the steering control “exceeds a reasonable threshold designed to prevent unintentional override”.169
Recommendation 5.
Safeguards against unwitting take overs should also be part of domestic GB typeapproval.
Chapter 4: Setting a safety standard
Driving safely is always a balance of safety and usefulness. The safest automated vehicle (and human driver) is the one that never leaves the garage. Industry, government and consumers must come together then to decide what safe driving means for a machine, and how we can measure conformance with that definition so that governments will feel comfortable providing a license to drive to an automated vehicle.170
-
4.2 The standard definition of “safe” is that a thing is safe if its attendant risks are judged to be acceptable. However, people do not necessarily assess risks in simple numeric terms. They may be more tolerant of risks that are familiar, voluntary or accompanied by a clear benefit to them. People are less accepting of risks that are new, strange or imposed.
-
4.3 We considered when a vehicle might be considered safe enough to be deployed on public roads. The RAND Corporation notes that there is no consensus about this issue. 171They identify two divergent approaches. Some respondents make comparisons with a safe human driver (referred to in the UK as a “competent and careful” driver). Others aim to improve on the current level of casualties caused by human drivers in general (average drivers). There is a large difference between these two standards. Competent and careful drivers cause very few accidents. By contrast, the “average driver” is based on the full range of drivers currently on the road - from the safe to the distracted, drowsy, drunk, drugged or disqualified.
-
4.4 When we consulted on this issue, everyone agreed that AVs should be safer than human drivers in general - but thereafter opinions divided. Some consultees argued that AVs need only be a little bit safer (“a positive risk balance”). Allowing vehicles on the road when they are only 5 to 10% safer than human drivers would not only save lives initially. It would also allow for substantial safety improvements over time, as the technology improves.172
-
4.5 Others argued that AVs would need to be substantially safer than human drivers to gain public acceptance. The public do not simply accept deaths and serious injuries caused by bad human drivers. Instead there is a strong desire to criminalise such behaviour.173
The public are unlikely to accept an AV that acted in the same way as a human driver who caused death by dangerous driving. Furthermore, even if AVs are safer overall, they should not introduce greater risks for any particular group, such as pedestrians or cyclists.
-
4.6 In our view, it is important to set a standard to decide whether automated driving is safe enough to be permitted on roads or other public places. We accept that before a vehicle is given authorisation, it will be difficult to measure its safety against the standard. Regulators will not be in a position to predict the level of injuries in precise terms, though they can assess a range of scenarios and known risks. The main effect of the standard will be following deployment. The in-use regulator will need to have a clear standard against which to measure the safety of vehicles in-use, for two reasons. If the standard is met, the public can be reassured after each adverse incident that AVs remain safe overall. And if the standard is not met, regulatory action can be taken to require improvements or to remove vehicles from the roads.
-
4.7 In Consultation Paper 3 we summarised the divergent views on this issue. We concluded that reaching a decision involved political judgement. Most consultees agreed. We therefore think that responsibility for setting the standard should rest with Government.
-
4.8 We have reached the view that, before any vehicles are authorised as having selfdriving features, the Secretary of State for Transport should publish a measurable safety standard. The in-use regulator would then have the task of devising practical ways to measure safety between AVs and human drivers and to collect the required data. If AVs consistently fail to meet the safety standard set, authorisation should be suspended until improvements are made.
-
4.9 In this chapter, we start with an overview of responses on the issue, to give a flavour of the debate. A more detailed account is available in the Analysis of Responses published alongside this report. 174We explain why we think that Ministers are best placed to make a decision, and how a published safety standard will fit with the other recommendations in this report.
POSSIBLE SAFETY STANDARDS: CONSULTEES’ VIEWS
-
(a) Option A: as safe as a competent and careful human driver;
-
(b) Option B: as safe as a human driver who does not cause a fault accident;
-
(c) Option C: overall, safer than the average human driver.175
-
4.11 No standard received a majority of support. Out of 89 responses, Option C (“safer than the average human driver”) received the most positive responses, but only by a small margin.176 However, many consultees thought that this was too low: it was said that public acceptance would require AVs to be at least as good as a competent and careful driver. Here we consider the views expressed, looking at each option in order of popularity.
Option C: Safer than the average human driver
Mobileye's position is that the standard mentioned in C is the most appropriate standard. Evidence shows that the average for a human driver to be involved in an accident is once every 50,000 hours of driving. Mobileye believes that a good and realistic goal for an AV, is to be achieve a better average than a human driver.
-
4.13 Mobileye explain that the 50,000 hours figure is “a simple ‘back of the envelope’ calculation”, based on US accident statistics.177
-
4.14 Several developers referred to the dangers of setting the initial standard too high, which would slow down the deployment of AVs and deprive the public of their benefits in the meantime. Five AI commented:
Ultimately, the aim should be to set clear blue water between the performance of an AV and the performance of a human. However, if too high a standard is set at the outset it will present an unachievable hurdle to obtain (and prove) pre-deployment. This would deny the public the productivity, transport cost and convenience gains AVs bring, and could restrict AV deployment to a limited number of domains and/or companies, reducing the benefit derived and market competition.
-
4.15 The Society for Motor Manufacturers and Traders similarly felt that setting too high a standard early on would “deprive society of the overall safety benefits for many years and result in needless casualties”. They advocated a standard described as “a positive risk balance while avoiding unreasonable risks”, which would be subject to continuous improvement:
We support the view set out in an industry-wide standard, ISO/TR 4804:2020, which suggests a meaningful threshold should be a positive risk balance while avoiding unreasonable risks. The acceptance criteria in determining a positive risk balance should be based on traffic accident statistics that are representative of relevant traffic types and scenarios.
As the history of automotive has shown, continuous improvement and innovation in safety is a hallmark of the industry. Aided by data from in-use monitoring, it is expected that continuous improvement and innovation will result in automated vehicles that are even safer in the future.
Using a “positive risk balance” as a starting point
-
4.16 The idea of a “positive risk balance” encapsulates the idea that AVs should be safer than human drivers, but possibly only by a small margin. Some respondents thought that the AVs should be safer than this - and should exceed human drivers by a prescribed margin. Peter Whitfield of P. Whitfield Consulting Ltd wrote:
"Safer than the average human driver" is a reasonable starting point but there is also the option to sit between this and "safe as a competent and careful human driver" by adding a stretch percentage e.g. 20% safer than average. This will help reduce casualties, increase confidence and provide a better economic case.
Some modest degree of improvement... (may be 5 - 10%) is a reasonable starting point. However, year by year this standard should increase as technology should allow us to be safer over time. Starting at 5% better and then asking for another 5% every other year, etc.
The AV industry has promoted its technology as being much safer than a human driver and promising a big saving in road casualties, so they should be held to that. An average reduction in casualties (per km) travelled on the same categories of road of at least 75% should be required.
Option A: As safe as a competent and careful driver
RoSPA believes that automated vehicles must be as safe as a human driver in all situations. These vehicles must abide by traffic rules, avoid collisions and treat other road users with consideration. We do not believe that these vehicles should be deployed on our roads before they meet these standards. [Royal Society for the Prevention of Accidents]
A major selling point for investing in the development of automated vehicles is that they have the potential to make roads a safer place for all road users. It is our expectation that the minimum standards for assessing the safety of automated vehicles would be that they are at least ‘as safe as a competent and careful human driver’. [International Underwriting Association]
To accept anything less than competent and careful driving from an AV would not be in keeping with the proposed benefits of introducing AVs onto our roads. There is also the risk that if more accidents were allowed to happen, drivers would be dissuaded from believing that AVs are safe; this could result in significant long-term issues in take-up. [Direct Line Group]
Developments of the “careful and competent” standard
-
4.20 Some consultees suggested alternative versions of this standard. Thatcham Research said that the safety benchmark should be “as safe as a competent human driver, driving a vehicle fitted with the most advanced L2 driver assistance 178available in the UK, with those systems enabled”.
-
4.21 Cycling UK suggested that the test should be that “they should never drive in a way that would result in a points deduction (let alone an automatic failure) if a human driver drove in that way during a driving test.”
We advocate this high threshold to ensure that the advent of AVs results in a step-change improvement in road safety, and not merely an incremental advance. Our current standards of road safety are intolerably poor compared with other transport networks (rail, maritime and aviation), and it is the most vulnerable groups (e.g. children, pedestrians, cyclists etc) who suffer most from these failures.
Option B: As safe as a human driver who does not cause a fault accident
-
4.23 This option received the lowest support, with just five respondents in favour of it. Among these, it was seen as easier to quantify than the “competent and careful driver” test, and more demanding than the average driver test. ITS United Kingdom commented:
We believe that the public would demand much higher than average driving standards. What would be achieved by a competent and careful driver would need to be examined in detail, probably in court anyway, so the most practical approach is (b).
[Option B] is desirable but some compromise may be necessary to make it technically achievable. For example basing the definition of 'at-fault' on a machine-verifiable technical standard rather than existing law.
All three standards too low
Our Vision Zero approach to road safety aims to eliminate all deaths and serious injuries from London's transport network by 2041. To this end we would advocate for the highest level of safety possible. We would expect this to be safer than a competent and careful human driver and continually improving.
In 2019 in London, there were 3,147 deaths and serious injuries of pedestrians, cyclists and motorcyclists, versus 575 for car occupants. Automation has the potential to deliver a sea change in road safety for these vulnerable road users, and we aren’t currently seeing the level of focus and ambition here that we would like.
Human error has been attributed to causing nearly 90% of crashes. Of this number, over 40% of this fatality is attributed to alcohol consumption, drugs, distraction and fatigue. Therefore, humans should not be used as a yardstick as we are not trying to just reduce collision numbers with driverless cars, but eliminate it.
Ethics experts have put forward several reasons for why machines, more broadly, should be held to higher standards than humans - for instance, because an error in the machine’s algorithm will be magnified through machine learning in a way that human error would not or because it is more challenging to rectify and overturn these errors in complex models or because machines are inherently limited in recognising something as new when their model does not hold.
Some early research seems to support the view that a sizeable proportion of the public wants self-driving cars to be at least two orders of magnitude safer than conventional cars, akin to rail and air travel, which is what we would predict from risk acceptability in forms of transport involving novelty and a lack of control. People expect higher safety when they are putting their lives in the hands of others, and this may be further complicated with the addition of (possibly unaccountable) automation.
Equity in the distribution of risk
-
4.30 Consultees also raised the problem that even if AVs are safer overall, they may redistribute risks, possibly from car occupants to more vulnerable road users. The Motorcycle Action Group, for example, feared that AVs increase risk “to the non-robot motorcycling community, and other road users too”.
-
4.31 Driverless Futures? noted that “a sense of justice and injustice will frame public risk perceptions”:
Regulators might have targets for safety, but members of the public may legitimately disagree especially if the beneficiaries of safety improvements are predominantly the users of ADS rather than shared by all road users.
Standards must be measurable
Known safety targets (even if they remain fluid) can provide interim clarity for developers on their progress while also giving consumers a basis for appreciating that an AV is safe enough for their needs.
It will be of the utmost importance that the definition of ‘competent and careful driver’ is clear and quantifiable in order to support manufacturers in their development of ADS. The quantification element could be in respect of incident frequency and severity rates, which could be used to benchmark the performance of automated vehicles.
A suggestion would be to seek to establish a predicted collision rate, for example one per X million miles or kilometres. This would need further clarification with respect to context because the injury-collision rate per mile travelled for human drivers is higher on rural roads and urban roads compared to motorways.
SAFETY STANDARDS: SUMMARISING THE DEBATE
-
4.35 In the course of this project, no-one has argued that the economic or social benefits of automated driving would justify an increase in road injuries. It was thought that, as a minimum, AVs should not be allowed on the road unless they drive at least as safely as human drivers.
-
4.36 However, views are split on whether AVs should be permitted to drive themselves when they are marginally safer - or only when they are much safer. The argument for allowing vehicles on the road which are only marginally safer is that even this will save lives - and it has the capacity to save many more lives as improvements are made. On the other hand, the public may demand that AVs are much safer - given that they represent a new and strange risk, which is often imposed on road users without their agreement.
-
4.37 One problem with requiring only a marginal improvement is that AVs require a change in the way that society reacts to casualties. Society currently deals with deaths and serious injuries caused by bad driving by blaming, prosecuting and imprisoning offenders. There are currently eight offences of causing death or serious injury by driving179 with significant public pressure to create more offences and to increase sentences.180 Prison sentences are common.181
-
4.38 In an automated environment, it is no longer possible to penalise individual drivers in this way. Under our scheme, authorisation would only be suspended or withdrawn if AVs fall below an established standard. If the standard is set low, AVs would only be required to replicate an “acceptable” level of both good and bad human driving. This would allow occasional collisions that display the same level of safety as drunk, drugged or disqualified human drivers. Unlike the way that society deals with bad human driving, these occasional collisions would not be seen as aberrations but as an acceptable part of the enterprise.
-
4.39 Consultees also raised issues about the appropriate comparator. ABI/Thatcham pointed out that an AV should be compared with the safest, most advanced cars with SAE Level 2 driver support,182 and suggested that comparisons should be made with those cars. Others pointed out that if an AV is providing a bus service, the comparison should be with other buses - which are much safer than motor vehicles as a whole. And if AVs are driven on motorways, the comparison should be with motorway driving (which is safer mile for mile than other roads).183
-
4.40 Finally, there are issues of risk distribution. Even if AVs reduce casualties overall, they may still disadvantage some groups. This would be particularly problematic if AVs increased the current level of risk to vulnerable road users or groups defined by protected characteristics (such as disability, age, race or sex).184
WHO SHOULD SET A SAFETY STANDARD?
-
4.41 In Consultation Paper 3, we said that the final decision over whether a vehicle was safe involved asking whether any remaining risks were acceptable to the public. We concluded that this was, ultimately, a political question which should be taken by elected representatives.
-
4.42 The Faculty of Advocates agreed:
The decision of what is “safe enough” in the context of automated vehicles is quintessentially a policy decision rather than a legal or technical decision. It should be a decision made on behalf of the British public by suitably advised politicians and for which those politicians are accountable.
We consider that the definition of the safety standard may therefore need to be more nuanced than can be achieved in a single sentence. We would tentatively propose that the definition and publication of the acceptable safety standard (against which the “sufficiently safe” decision is made) should be a duty placed on the Secretary of State rather than one to be enshrined in legislation.
The balancing of risk should rightfully sit with the Secretary of State for Transport, as this is unequivocally a political decision that should be informed by expert guidance. [AXA UK]
We believe that advice from a specialist regulator is essential to ensure that there is a full understanding and appreciation of the actual capabilities of any given vehicle but that ultimate responsibility and accountability rests at a government level. [Zurich Insurance]
-
4.45 Some consultees said that the final decision on whether AVs were sufficiently safe to gain public acceptance should be made at national rather than international level. HORIBA MIRA said that testing standards should be agreed internationally. However, “individual countries would be able to apply discretion is in making judgements on what test results are acceptable for their population”. National decision-making could take account of current traffic risks, the prevalence of problematic edge cases, the expected economic and social gains of AVs and the willingness of the population to engage with the new technology.
All these considerations are inherently both political and regional in nature, and therefore best decided by individual governments. [HORIBA MIRA]
HOW WOULD A SAFETY STANDARD BE USED?
It has never been feasible to provide an accident rate comparison between a new transport system and its predecessor (e.g. railways versus canals, or aeroplanes vs railways) prior to that new transport system being deployed commercially on a wide scale. Therefore, it shouldn't be seen as feasible or reasonable to require a statistically valid comparison of accident rates for AVs and manual vehicles prior to AVs being approved.
-
4.47 HORIBA MIRA said that before deployment, any safety standard should be seen as “a guiding philosophy” rather than a test. The safety standard becomes measurable after deployment, when vehicles are in use on the roads.
-
4.48 We agree that the safety standard will be used differently pre and post deployment. Before deployment, the safety standard sets the performance expectation, but in practice it will be difficult to measure performance against the standard. As discussed below, its main use is after deployment, when monitoring the safety of vehicles in-use.
The role of the safety standard pre-deployment
-
4.49 We discuss pre-deployment safety assurance in depth in Chapter 5. At this stage, some data on comparative collision rates may be available,185 but it may not be robust. Both the RAND Corporation 186and Intel Mobileye 187have shown that measuring comparative safety may take billions of miles of test driving to demonstrate statistically significant differences.
-
4.50 For a vehicle to be authorised as having self-driving features, the authorisation authority will need to scrutinise the ASDE’s safety case, looking at how the ADS will negotiate a wide range of scenarios. For all likely scenarios, the ASDE will need to provide evidence (drawn from road trials, track trials or simulation) that the ADS can negotiate the situation safely.
-
4.51 However, there may be some extremely rare situations which the ADS cannot deal with or cannot deal with well. An example often given is the possibility that an aircraft might land on the motorway. The authorisation authority will need to make a judgment over whether any known (but rare) risks are acceptable, drawing on the safety standard to set the performance expectations. In some instances, the standard might give specific directions over which scenarios must be covered. In others, the authorisation authority will need to weigh the issue in the round, looking at all known or anticipated risk to ensure that the Secretary of State’s standard is not exceeded.
The role of the safety standard when vehicles are in-use
-
4.52 In Chapter 6 we recommend an in-use regulator which will (among other tasks) compare the safety of automated and conventional vehicles while they are in use on the road. We see the published safety standard as central to this task. Following an adverse incident the standard can be used either to reassure the public that AVs are safe overall, or (if the standard is not met) to take immediate regulatory action.
-
4.53 Clearly, the in-use regulator should not simply ignore an adverse incident on the ground that it is within the accepted tolerance.188 AVs will be required to comply with road rules: if a road rule has been breached, our recommended scheme gives the inuse regulator power to issue civil penalties. More fundamentally, incidents should be seen as learning opportunities, leading to continuous improvements. Following an adverse incident, the in-use regulator would have power to issue an improvement notice. However, the authorities should not withdraw authorisation for incidents within the tolerance, unless there was evidence to suggest that the incidents would be repeated in a way that would fail the overall standard.
OUR RECOMMENDATION
-
4.54 We think it is important to set a measurable base line against which safety in practice can be assessed. This is needed to promote consistency and transparency.
-
4.55 Ultimately, the decision over how safe an AV should be while it is driving itself depends on whether the remaining risks are acceptable to the public. This is essentially a political question, best taken by ministers. Ministers need to set a policy which can then be interpreted and applied by regulators with the support of experts, as part of the authorisation and monitoring processes.
-
4.56 In the course of this study, no-one argued that the social or economic benefits of AVs are worth an increase in road deaths or injuries. A positive risk balance was seen as the minimum acceptable standard: overall, automated driving should cause fewer deaths and injuries than human drivers. In our view, the comparison should be with British drivers, rather than with drivers worldwide or in another country.189 As we discussed in Consultation Paper 1, road deaths in Great Britain are extremely low by international standards (with deaths in some American states and EU countries over four times higher).190
-
4.57 However, ministers may decide to set a more demanding standard. We hope that the responses to our consultation serve to highlight the regulatory choices. One possibility would be to demand a percentage improvement on human drivers: consultees variously suggested a 5% to 75% improvement. There is an attraction to the idea that AVs should be required to drive more safely over time: for example the standard could require a percentage improvement every five years over the next two decades.
-
4.58 Another possibility would be to set a more demanding comparator. For example, ABI and Thatcham Research suggested a comparison with vehicles fitted with advanced
-
188 That is, within the acceptable overall number of incidents of harm set by the Secretary of State.
-
189 In response to us, Mobileye made comparisons with drivers in the USA.
-
190 CP1, paras 5.88 to 5.90.
driver assistance. It would also be possible to compare AVs with humans who are legally permitted to drive. In other words, one could compare automated driving with a pool of human drivers after removing all deaths or injuries caused by drivers who were unlicensed, disqualified, drugged or over the alcohol limit.
-
4.59 Many consultees stressed to us that AVs should not cause greater risks to particular groups of road users, even if they were to save lives overall. During the course of this project, we have received responses from those representing vulnerable road users, including pedestrians, cyclists, motorcyclists and horse riders. 188They emphasised that AVs must be trained to be safe around all current road users: existing groups should not be subject to greater risks than they are now. We would expect this to be reflected within the published safety standard.
-
4.60 Furthermore, as we discussed in Chapter 2, the Secretary of State, as a public authority, is subject to the public sector equality duty. Public authorities must, in exercising functions, have due regard to eliminating discrimination and advancing equality of opportunity for persons with protected characteristics. 189We would expect the published standard to reflect this duty. It could, for example, provide metrics to ensure that disabled road users are not subject to greater risks than they are now following the introduction of AVs.
-
4.61 Whatever the standard set, it needs to be measurable. This will not be easy. In Consultation Paper 1 we discussed some of the technical challenges.190 In Consultation Paper 3 we concluded that collecting and comparing data “will require specialist, dedicated expertise over a period of time”. 191In Chapter 6 we recommend that the in-use regulator should be given a statutory responsibility to collect and assess data against the standard.
-
4.62 In our view, the process of setting a standard and measuring against it is essential for public acceptance. When deaths and injuries occur, it will be important to reassure the public that AVs are nevertheless safer than human drivers, and to have the evidence to support this claim. And if vehicles were to fail the standard, then it would be important to take regulatory action as soon as possible. We therefore recommend that legislation should require the Secretary of State for Transport to publish a safety standard against which the safety of AVs can be measured.
-
4.63 The safety standard published by the Secretary of State would have the status of statutory guidance. Statutory guidance does not have the binding effect of legislation. 192However, we recommend that regulators should “have regard” to it. This means that although regulators may depart from it,193 any departure from would be unlawful without cogent and compelling reasons.194
-
4.64 In Chapter 6 we look at the in-use regulator’s statutory responsibilities. As part of that discussion we recommend that the in-use regulator should collect and analyse data to measure the safety of automated driving against the Secretary of State’s safety standard. We would also like to see the in-use regulator increase understanding in this area. We therefore recommend that the in-use regulator should explore a range of possible measures to measure AV safety and advise the Secretary of State on their use.195
-
4.65 The in-use regulator will have a responsibility to consider all risks associated with automated driving, not simply adverse incidents which occur while a specified ADS feature is engaged. For example, problems might occur following take over, or if users wrongly think that the ADS is engaged while it is not.
Recommendation 6.
Recommendation 7.
Chapter 5: Initial approval and authorisation
-
5.1 At present, vehicle approval and driving are dealt with by separate systems of law. Vehicle approval is a largely international process: the UK is bound both by the Revised 1958 UNECE Agreement on Wheeled Vehicles, Equipment and Parts, and by a series of trade agreements with (for example) Japan, Korea, and the European Union. 196By contrast, driver liability and traffic management are largely a matter of domestic law.197
-
5.2 AV regulation involves making decisions about both the design of vehicles and how they discharge driver responsibilities. It must therefore fit within both legal systems. Our recommendations on approvals are designed to be fully compatible with the UK’s international obligations with regard to vehicle standards. However, decisions affecting driver responsibilities should be taken at domestic level, in a way which reflects Britain’s high level of road safety, laws on driving and unique road environment.
OVERVIEW OF OUR PROPOSED APPROVAL AND AUTHORISATION SYSTEM
-
5.3 In January 2021, the UK exited the EU and acquired greater freedom over the way in which it approves vehicles in Great Britain. In view of this, we set out in Consultation Paper 3 a comprehensive system involving a two-stage process for the approval and authorisation of AVs in Great Britain. These two stages now form part of our recommendations.
-
5.4 The first stage is concerned with the approval of the vehicle. To place an AV onto the market a manufacturer may choose to obtain systems type approval at international (UNECE) level. Alternatively, a manufacturer or developer could also apply under a domestic AV technical scheme. In both cases, the vehicle as a whole will then need to receive GB whole vehicle approval (which will soon be required for most new motor vehicles registered for use on GB roads).
-
5.5 Before the vehicle can then legally drive itself it will need to undergo a separate “authorisation” stage. Authorisation will be needed in order for the individual in the driving seat to acquire the status of a user-in-charge when using a self-driving feature and to divert their attention from the road. It would also be needed for a no user-in-charge (NUIC) vehicle to be used without a responsible person on board.
-
5.6 To obtain authorisation, the vehicle manufacturer or developer would submit its vehicle to the British authorisation authority. The authorisation authority would assess each of the vehicle’s ADS features. As discussed in Chapter 3, it would need to be satisfied that each specified ADS feature can control the vehicle so as to drive safely and legally, even if an individual is not monitoring the driving environment, the vehicle, or the way that it drives. If authorisation is granted, it should state whether each ADS feature is authorised for use with or without a user-in-charge.
-
5.7 In addition, the authorisation authority must assess whether the entity putting the vehicle forward for authorisation has the reputation and financial standing required to be an Authorised Self-Driving Entity (ASDE). The ASDE must be able to assure the vehicle’s continued safety and adherence to road rules throughout its lifetime. The ASDE must also demonstrate compliance with other laws, such as those related to data protection.
-
5.8 This two-stage process (of approval and authorisation) is set out in the following
figure:
 |
|
Figure 5.1 The two-stage process. Vehicles or vehicle types must first go through the approval stage. The vehicle or vehicle type can initially be assessed via the international UNECE type approval system or the Domestic AV technical approval scheme. The vehicle or vehicle type will then need to obtain GB whole vehicle approval via the GB Type, small series or individual vehicle approval schemes. To be authorised with self-driving features the vehicle/ vehicle type would then need to undergo the second authorisation stage. Vehicles/vehicle types which fail this stage will not have ADS features which can legally self-drive. Vehicle types that obtain GB whole vehicle approval but are not put forward for authorisation will also not have ADS features which can legally self-drive the vehicle. |
STAGE 1: APPROVAL STAGE
Two paths to approval
-
5.9 Our proposals in Consultation Paper 3 provided manufacturers and developers with a choice over how to obtain approval for an AV. Manufacturers could obtain approval internationally through the UNECE system: an example would be approval under UN Regulation 157 on Automated Lane Keeping Systems (the ALKS Regulation).198 Alternatively, manufacturers and developers may decide to obtain approval at domestic level through the domestic AV technical approval scheme.199
-
5.10 We asked consultees whether they agreed that there should be a choice of paths to approval. We highlighted that a national scheme could be particularly useful for vehicles used in limited local contexts. This could allow Great Britain to pioneer new forms of automated passenger and freight services without waiting for agreement between all the UNECE contracting states.
-
5.11 Most consultees agreed that the UK Government should establish a domestic scheme; and that developers should have a choice to apply to it:
We favour having national approval in addition to international. We are unsure how international regulation will evolve, and we believe this would inhibit early AV deployments if it were the only route to regulated operation. [Wayve]
-
5.12 Consultees thought that a domestic path could be especially useful in the early stages of AV deployment when international regulations for automated vehicles are still developing. A domestic scheme would allow appropriate flexibility, thereby encouraging innovation, whilst at the same time providing clear and unambiguous standards for those wishing to deploy their systems in a local context.
-
5.13 We are encouraged by these responses to our proposals and have kept the two-paths aspect of our approval system as part of our recommendations.
-
5.14 However, we also note consultees’ concerns that the domestic route should not diverge too far from the international one. Although international standards are currently in their infancy, these will no doubt develop over time. Some consultees thought that divergence between the two routes might compromise safety or result in unnecessary duplication should manufacturers eventually wish to apply via both:
There needs to be a fine balance between ensuring that the type approval processes for vehicles allowed onto the UK roads are stringent enough, but also ensuring that they do not diverge too significantly from other markets given that the UK manufactures many cars for export as well. [ABI/Thatcham]
-
5.15 As international standards begin to emerge, we agree that it is important that efforts be made to harmonise the international and domestic type approval processes, as far as is practicable and safe. We hope that as the UK continues to participate in the development of UNECE regulations it will incorporate best practice and any relevant provisions into the domestic scheme.
Approving an AV, not an ADS
-
5.16 In Consultation Paper 3, we framed our proposed approval process as an “ADS” approval system. This reflected uncertainties about how ADSs would be developed, manufactured and fitted in vehicles before being placed on the market. Currently, many automated vehicle developers fit their ADSs into vehicles manufactured by others. 200We therefore asked whether a developer should be able to submit an ADS for either domestic approval or authorisation if they were not responsible for manufacturing the rest of the vehicle.201
-
5.17 A significant portion of our stakeholders thought that it would be wrong to approve an ADS separately from a vehicle. This was particularly true for stakeholders who were concerned with assuring AV safety:
A self-driving system is highly sensitive to small changes. For example, small adjustments of the control system will affect the vehicle dynamics, the position of the sensors and their field of view will affect the perception system. It should be considered whether the developer would have sufficient knowledge about the rest of the vehicle to be in a position to provide sufficient information to satisfy the requirements to obtain approval. [Five AI]
It is important to recognise that you cannot take an approved ADS, put it on an approved vehicle, and expect them to be approved together. [Assuring Autonomy]
While the majority of the software and hardware that comprise an ADS may be portable between vehicles, most safety outcomes are dependent on vehicle-specific attributes (such as sensor mounting points which affect field-of-view and propensity to gather debris on the sensors, braking capability, controller/actuator calibration, vehicle dimensions, etc). [Connected Places Catapult]
-
5.18 Some consultees such as Bryan Reimer (MIT) suggested that developers would need to submit the package together with the vehicle manufacturer, or at least make the case to the regulator that the manufacturer’s systems were no longer relevant.
-
5.19 In a similar vein, consultees also voiced concerns about approving the “installation” of an ADS into a vehicle. In Consultation Paper 3 we proposed that developers should specify the type of vehicle in which their ADS could be installed. Consultees highlighted that it was incorrect to think of an ADS as something separate which could be “installed”:
“installed” is the wrong terminology. ADS need to be integrated into the vehicle at the point of manufacture [Thatcham/ABI]
An ADS is not installed. It is weaved and integrated into all the other systems that exist. This is not about treating the ADS as a separate component and then bolting it on. The ADS needs to be absorbed into the warp and weft of the whole vehicle. [Assuring Autonomy International Programme]
-
5.20 Stakeholders have since described to us how integrating all of a vehicle’s systems is a complex task. They noted that current vehicle approvals are based on assessing systems in a given vehicle or vehicle type rather than individual systems in isolation,202 and this would need to remain so for AVs.
-
5.21 We are persuaded by these arguments and agree with consultees that both stages of the approvals process will need to ensure that the ADS is appropriately integrated with the vehicle. To emphasise this, we no longer refer to an ADS approval scheme but rather an “AV approval scheme”.203
-
5.22 However, taking stock of the current AV development landscape, we think it is still likely that some developers, at least initially, will wish to adapt vehicles manufactured by others to become self-driving. For this reason, we still seek to ensure that this model of AV development is captured by our AV approval scheme. Considering whether an ADS is safely integrated within the vehicle is a largely technical matter which would need to be included in the first approval stage.
-
5.23 Stakeholders have highlighted to us that vehicles constructed by multiple parties can obtain approval under current approval processes. Approval authorities have the capacity to approve vehicle types which are “complete”, “incomplete” or “completed”. Broadly speaking the difference between these approvals is as follows:
-
(1) complete vehicle approval is given when a fully finished vehicle is brought to the technical service for approval;
-
(2) incomplete vehicle approval assesses the specification of a partially assembled vehicle;
-
(3) completed vehicle approval assesses the final assembly, as a fully finished product, of a multi-stage vehicle that has previously received incomplete vehicle approvals.
-
5.24 Most conventional passenger vehicles are submitted by manufacturers for complete vehicle approval. However, both the incomplete and completed vehicle approval can be used as part of a multi-stage build, where different manufacturers build different parts of the vehicle and receive incomplete vehicle approval. Vehicles such as buses
and heavy goods vehicles are often built and approved in this way. It offers developers who do not build an entire vehicle a route to technical approval.
GB whole vehicle approvals
-
5.26 We have already noted the changing law of vehicle approvals following the UK’s exit from the EU. Since 1 January 2021, Great Britain has operated a Provisional GB Type Approval Scheme to replace EU whole vehicle type approval.
-
5.27 EU whole vehicle type approval supplements the UNECE framework, under which manufacturers can obtain UNECE approval for individual systems and components. To receive EU whole vehicle type approval, manufacturers must meet two sets of requirements. First, manufacturers need to confirm that they have obtained a series of UNECE approvals for the constituent parts of the vehicle. Second, manufacturers must show that the vehicle type meets additional EU safety, security and environmental standards. For example, the EU imposes additional standards for exhaust emissions, windscreen wipers and eCall.204
-
5.28 At present, if the manufacturer holds a valid EU whole vehicle type approval, the Vehicle Certification Agency (VCA) issues provisional approval. However, it is expected that in 2022 a comprehensive GB Type Approval scheme will replace the provisional scheme. GB Type Approval will cover most passenger and goods vehicles 205and will be required in order to register vehicles for use on GB roads.
-
5.29 Under the GB Type Approval scheme, new vehicles brought to the market for the first time in Great Britain will need to comply with GB Type Approval requirements. According to the VCA website the following are expected to be introduced as part of the scheme:
-
(1) GB approval number marked on the vehicle/product;
-
(2) GB Certificate of Conformity supplied with all vehicles;
-
(3) Manufacturer's representative based in UK;
-
(4) VCA Conformity of Production checks.206
-
5.30 The Department for Transport may consult on its proposals before implementation.
-
5.31 As we saw, EU type approval has two elements. Manufacturers must show that they have obtained UNECE approval for individual systems and components - and must also meet additional EU requirements. GB Type Approval is likely to follow this pattern. Under the 1958 agreement, the UK will still need to accept approvals issued in other UNECE countries.207 However GB Type Approval could place additional GB-specific requirements on the manufacturer: requirements which do not replicate the UNECE approvals already given.208
-
5.32 We have framed the first stage of our approval and authorisation process as having two potential bases: UNECE type approval for vehicle systems or a domestic technical approval scheme for AVs. It is important to highlight that most vehicles with UNECE systems approvals will be required to obtain GB Type Approval for the entire vehicle before they can be placed on the market. However, UNECE type approvals are likely to allow satisfaction of some - or possibly all - of the GB Type approval requirements.
-
5.33 GB Type Approval could impose additional requirements, in a similar way to EU whole vehicle type approval. These requirements could be the same as, or different from, those imposed by the EU. GB Type Approval could, for example, require vehicles to have additional data storage or collision detection systems. The VCA could also require manufacturers to provide certain information. The VCA could, for example, require ongoing reporting of adverse incidents involving a vehicle fitted with an ADS as a condition of granting GB Type Approval. The VCA could also require the manufacturer to state whether the vehicle is intended to be self-driving, to help identify those vehicles which should also undergo the second authorisation stage of the process.
-
5.34 The UK also operates domestic schemes to approve individual vehicles and vehicles which are produced in low numbers. Individual vehicle approvals (IVAs), unlike type approvals, are given to a single vehicle. Physical inspection and other tests of the vehicle are required before approval is given. Small series type approval is similar to GB Type Approval but it has technical and administrative requirements designed for smaller production runs. IVAs, GB small series approvals and GB Type Approval relate to a whole vehicle; we refer to them collectively as GB whole vehicle approvals.209
Domestic AV technical approval
-
5.35 Responses to Consultation Paper 3 were in favour of establishing a domestic path for the approval of AVs. In light of this, we recommend that the UK Government should establish a domestic AV technical approval scheme for the approval of vehicles with ADS features which are not covered by UNECE approvals. Vehicles with ADS features approved under this domestic scheme should be able to obtain GB whole vehicle approval, if all other criteria for approval are met.
-
5.36 The approval system could work in two broad ways. One way would be to verify a given vehicle system against a detailed list of specifications. Most UN Regulations work in this way: the ALKS Regulation, 210for example, sets out detailed rules for some specific scenarios (though it takes a broad-brush approach to others). These detailed specifications could be set out in secondary legislation.
-
5.37 An alternative approach would be similar to the exemption procedures for new technologies in EU law and the revised 1958 agreement. 211These provide that new technologies or new concepts may be approved even if they do not meet the detailed specifications set out in UN Regulations, so long as they ensure “at least an equivalent level of safety and environmental protection”. This requires a broader validation. The applicant would provide a full safety case and the type approval authority would then have discretion to establish its own methods to assess that case.
-
5.38 At the time of writing this report, the full nature of GB whole vehicle approval has yet to be established. The existing powers in the Road Traffic Act 1988 may be amended, so we cannot comment in depth on the legislative powers to establish an AV technical approval scheme. However, our understanding is that GB whole vehicle approval is likely to be sufficiently wide and sufficiently flexible to allow for the approval of safe ADS features in the absence of UNECE approvals. This may be done before the vehicle is considered for GB whole vehicle approval, or it might be as part of a single process.
Recommendation 8.
STAGE 2: AUTHORISATION
-
5.40 The approval process allows a vehicle to be placed on the GB market. It does not change the legal status of the vehicle’s users. Before a person in the driving seat can turn away from the driving task and acquire the legal status of a user-in-charge, the vehicle will need to be authorised as having self-driving features. The same is true for vehicles without anyone in the driving seat.
-
5.41 The authorisation process must not replicate the checks that have already been carried as part of the approval stage. Under the terms of the revised 1958 UNECE Agreement, member countries must not require further testing or documentation for issues that have already been covered by type approval. Art 3(2) of the Revised 1958 Agreement, prohibits “any further testing, documentation, certification or marking” concerning a UNECE approval. However, it is permissible to require new documentation and tests for issues that are not covered by the approval process, and which are aimed at answering different questions.
-
5.42 So, whilst the national or international approval will be largely concerned with technical issues (verifying and validating systems against specifications), the authorisation decision will be based on a wider consideration of the vehicle, its ADS features and its manufacturer or developer.
-
5.43 The second stage of our scheme (the authorisation stage) requires a UK regulator to determine whether a vehicle can drive itself safely. As we recommend in Chapter 3, the GB authorisation authority must ask whether each specified ADS feature can control the vehicle so as to drive safely and legally, even if an individual is not monitoring the driving environment, the vehicle or the way that it drives.212 It must also assess whether or not the manufacturer or entity putting forward the vehicle is capable of undertaking the duties of an ASDE.
The authorisation authority
-
5.44 In this report we refer to the UK regulator with responsibility for the authorisation stage as the “authorisation authority”.
-
5.45 The VCA has, for the most part, sole responsibility for the approval of vehicles in the UK. They are the UK’s type approval authority under the UNECE 1958 Agreement and they administer the GB Type Approval scheme. It is therefore likely that the VCA will also be given responsibility for the authorisation stage. Given their responsibility for vehicle approvals, the VCA will no doubt develop internal procedures for processing both type approvals and authorisation, perhaps in parallel. However, the exact organisational requirements will be a matter for the UK Government and will not be set in statute. For clarity we continue to refer to a distinct authorisation stage and authorisation authority in the remainder of this chapter.
Why is the authorisation stage necessary?
-
5.46 As discussed in Chapter 3, our recommendations draw a bright line. Where a vehicle is authorised as having self-driving features, and when those features are appropriately engaged, the person in the driving seat is no longer criminally liable for the dynamic driving task. 213Instead, the AV and its ADS features must comply with any road traffic rules that regulate the dynamic driving task. Whilst technical standards for AVs are being developed by the UNECE, there is no international agreement on the specific road rules that AVs must comply with and what legal liabilities arise from their use. This remains a matter of national competence. It is therefore for the UK to ensure that AVs permitted to self-drive on British roads are capable of doing so in compliance with road traffic law and safely. In Chapter 4 we recommend that the assessment of what is sufficiently safe should have regard to the Secretary of State’s published safety standard.
-
5.47 Recently, the Vienna Convention on Road Traffic 1968 was amended to clarify its position on AVs. The new article 34 bis makes it clear that compliance with the convention does not require a driver if there is an ADS which, apart from type approval, complies with “domestic legislation governing operation”. This new article makes it clear that parties to the convention may impose additional requirements for vehicles to be allowed to drive themselves in their respective territories.214 Therefore, the status of the human user may differ from country to country.
-
5.48 A key part of our scheme is assigning overall responsibility for the dynamic driving task to the ASDE.215 We see the ASDE as crucial to the effective enforcement of AV safety through a workable system of monitoring and sanctions. The ASDE will have ongoing obligations to keep its vehicles safe and ensure that they continue to drive in accordance with British laws. The ASDE will be required to report certain safety related data to the authorisation authority and the in-use regulator. It is also important to check that the ASDE is in a position to comply with other relevant laws in Great Britain during the life of the vehicle, including laws on data protection and environmental protection.
-
5.49 Therefore, before a vehicle can “drive itself” in Great Britain, in addition to approval, a detailed consideration of the vehicle, the ASDE and the ability of the ASDE to comply with its legal obligations will be required. As a matter of good practice, this process should make clear to potential ASDEs what legal obligations will fall on them during the life of a vehicle.
-
5.50 For all these reasons, we believe it is important for there to be two distinct stages: approval and then self-driving authorisation. After this, vehicles will be authorised as having self-driving ADS features and an ASDE will be identified as taking responsibility for the vehicle on an ongoing basis.
Support for a second authorisation stage
We agree with this second stage of the Law Commissions’ two stage process. Separate to the issue of technical vehicle or system approval, the approval of an ADS to be competent to drive on UK roads and to comply with UK road rules is a matter for national law, as is the obligation on the Secretary of State to designate automated vehicles under AEVA. We agree with the Law Commission that this approach reflects the current international approach to motor vehicle approvals and the national approach to driving standards (including where appropriate mutual recognition of driving licences).
As rightly pointed out by the Law Commissions’ report, the current legal framework for defining a vehicle as capable of self-driving is inadequate. We welcome the suggestion of establishing a new legislative framework for classifying self-driving vehicles. Members of the public and a broad range of experts should be involved in developing this framework.
Authorisation outcomes: the effect of failing to gain authorisation
-
5.54 In Consultation Paper 3 we suggested three possible outcomes of the authorisation procedure: not self-driving but driver assistance; self-driving with a user-in-charge; and self-driving with no-user-in-charge.216
-
5.55 Consultees had strong misgivings that the authorisation process might lead to an ADS feature being allowed to be used as a “driver assistance” feature. Consultees noted that a feature designed from the outset to be used without a driver might not be safe when used with one. An extreme example of this might be a vehicle designed without steering wheel controls. Such a vehicle, if not authorised for self-driving, could not then be used as a driver assistance feature.
-
5.56 We have been asked what would happen if the authorisation authority assessed a vehicle with type approvals from another country and GB type approval only to conclude that it was not safe to be put on the road as either self-driving or as a conventional vehicle. An example might be where type approval agencies in other UNECE countries were insufficiently familiar with GB road traffic laws to adequately assess ADS features for authorised use as self-driving in Great Britain. 217Such deficiencies in the approval may not become apparent until assessed by the authorisation authority.
-
5.57 Under the 1958 Agreement, the UK is obliged to accept approvals that come from other UNECE countries. However, mechanisms exist within the 1958 Agreement for contracting parties to resolve disputes about the interpretation or application of the technical regulations annexed to it. Article 10 of the 1958 Agreement provides that any dispute over the interpretation or application of the Agreement is to be settled by negotiation. A dispute unable to be settled is submitted to arbitration which is then binding on the parties. 218Our understanding is that such disputes are rare. Most technical regulations under the 1958 Agreement are written with input from all countries and interpretation is agreed before regulations are approved.
-
5.58 We agree with consultees that the authorisation procedure should not determine whether the ADS feature under review is a driver assistance feature. The outcome of a refusal of any authorisation should simply be that that the vehicle is not authorised for self-driving. If it is clear that an ADS feature with UNECE approval is not safe either with or without a driver, the UNECE dispute procedure can be invoked.
Different outcomes for different features?
-
5.59 Several consultees noted that some AVs may have some features which can only be used with a user-in-charge, and some features which can be used without one. For example, a vehicle may be equipped with an ADS feature such as automated lane keeping which requires a user-in-charge (UIC) to be in the driving seat while it is engaged. The same vehicle may also have an automated valet parking feature which can be used with no user-in-charge (NUIC). Therefore, depending on the ADS feature in operation, the vehicle could be used either with or without a UIC.
-
5.60 We agree with consultees that in future it is feasible that a single self-driving vehicle could be authorised with both UIC and NUIC features. We have therefore adopted the term “ADS feature” throughout this report.219 Simply put, an “ADS feature” is an automated driving system which is limited to a particular Operational Design Domain (ODD).
-
5.61 The authorisation authority will need to assess that each ADS feature in the vehicle fulfils the relevant requirements for UIC or NUIC use under UK law. For example, when operating in a UIC mode the vehicle will need to be able to issue appropriate transition demands. When NUIC features are engaged, the authority will need to be satisfied that the ADS can deal with reaching the limits of its ODD.
-
5.62 For this reason, the authorisation will not be a simple refusal or grant of an application. Instead, the authorisation will need to specify each ADS feature, describe its ODD and state whether that feature can safely be used either with or without a UIC.
Recommendation 9.
Authorisation assessment
-
(1) when the ADS feature is engaged, can the vehicle safely drive itself in compliance with traffic law even if an individual is not monitoring the driving environment, the vehicle or the way it drives;
-
(2) is the vehicle is supported by a suitable ASDE; and
-
(3) can the ASDE assure the safety of the vehicle and its continued compliance with GB law, throughout its lifetime?
-
5.65 In Chapter 3, we recommend that primary legislation should set the threshold for when a vehicle can be authorised as having self-driving features. In particular, the vehicle would not meet the threshold if an individual were expected to respond to external events in the absence of a transition demand. We believe that transition demands are compatible with self-driving. However, it will be important for the ASDE to show that the user-in-charge has sufficient time to gain situational awareness and, if they fail to take over, that there is sufficient mitigation against the risk of a crash.
-
5.66 In assessing a prospective ASDE the authorisation authority will need to consider a wide range of factors. We consider that an applicant should present as a minimum: evidence of approval (through one of the GB whole vehicle approval schemes), a safety case, an equality impact assessment and evidence of the applicant’s ability to undertake the duties of an ASDE on an ongoing basis.
The safety case
-
5.67 In Consultation Paper 3 we highlighted the role of the safety case as a tool which encourages manufacturers to assess and mitigate risk before deployment. A safety case also aids the regulator’s assessment of whether a vehicle meets the requisite level of safety. We noted their use in several high-risk industries such as nuclear, oil, gas and rail and that they are also becoming increasingly common in the automotive industry.
-
5.68 In brief, a safety case is a document, or a set of documents, which present a clear, comprehensive and defensible argument for the safety of a given system in a given context. 220A safety case consists of three main elements: claims, argument and evidence. The claims should define the safety objective or requirements of the system. The argument must then communicate the relationship between the evidence and the claims - implied arguments are not enough. Any mandatory technical standards can also be incorporated by the manufacturer as part of a safety case.
-
5.69 The benefit of a safety case approach is that the regulator could set the levels of risk that AVs must achieve, in line with the Secretary of State’s published safety standard. The regulator could also require that accepted technical standards must form part of the safety case. However, the applicant could be afforded flexibility in the evidence it provides to the regulator and the mix of tests it performs to gather the evidence.
-
5.70 Most consultees agreed that applicants should present a safety case to the regulator. Many also agreed that the regulator should provide clarity on what the safety case should provide.
-
5.71 Given the widespread agreement with our proposals, we continue to advocate using a variety of techniques to assess safety, as evidenced in a safety case. When applying for authorisation the ASDE would present a safety case to the regulator. The regulator would then independently review the safety case as part of the authorisation process.
-
5.72 In Chapter 11 we discuss the need for a “nominated person” to sign the safety case and confirm that they have taken steps to ensure that the information is correct and complete. In our view, the nominated person should occupy a senior position in the organisation. If the nominated person is insufficiently senior, the authorisation authority could reject the safety case.
An equality impact assessment
-
5.73 As we discuss in Chapter 2, the authorisation authority, as a public body, is subject to the public sector equality duty. They must, for example, have due regard to advancing equality of opportunity for those with protected characteristics (which includes race, sex, age and disability).
-
5.74 There are several ways in which AVs could have an unequal impact on the basis of protected characteristics, both for their own users and for other road users. In Chapter 3 we discuss how transition demands need to be designed for those with hearing loss. In Chapter 4, we comment that an overall safety benefit should not be at the expense of increasing risks for vulnerable groups. To assist the authorisation authority in fulfilling its equality duty, we recommend that the ASDE should submit an equality impact assessment. This should show how it has taken account of the needs of vehicle users and others using the road, to ensure that people are not treated unequally on the basis of protected characteristics.
Data
-
5.75 In Consultation Paper 3 we considered the data needed for our proposed scheme to work. In particular, we looked at the data that would need to be collected, stored and shared to investigate collisions and traffic infractions and to decide insurance claims.
-
5.76 We summarised initiatives at both EU and UNECE level to introduce “event data recorders” (EDRs). EDRs are triggered by sharp deceleration and record key data about the event (such as speed and braking).221 They are intended to allow authorities to analyse patterns of problems, rather than investigating individual collisions.
-
5.77 We also discussed the requirement in the ALKS Regulation for a second system of data capture, known as a Data Storage System for Automated Driving (or DSSAD).222
The DSSAD must record each time an ALKS is activated or deactivated or issues a transition demand (together with a date and time stamp). It also records when the vehicle is involved in a detected collision. However, there are as yet no standards for what collisions must be detected: it is possible that many “soft” collisions would not be detected by the system.223
-
5.78 Furthermore, the ALKS regulation does not require location to be recorded. Our understanding is that it would be technically feasible to add GPS co-ordinates to the time stamp, but this was omitted from the ALKS Regulation owing to privacy concerns. Instead, the ALKS Regulation leaves data issues as a matter of national competence.
The need for location data
-
5.79 In Consultation Paper 3 we concluded that location data would be needed to make our proposals work. Following a collision it will be important to know if the ADS feature was engaged. If a collision is not detected by the system it is unlikely that witnesses be able to pinpoint an exact time with sufficient accuracy to match the time against the vehicle data. We therefore proposed that AVs in Great Britain should record location as well as time. Following a short review of data protection law, we felt that this would be compatible with data protection principles. We received strong support from consultees, who agreed that location data was necessary to establish who was driving at the time of an incident and ensure accountability.
-
5.80 We therefore recommend that the authorisation authority must be satisfied that the vehicle can record and store the necessary data. Specifically, the vehicle must record and store location data for detected collisions and for the activation and deactivation of the ADS. We discuss how long the data should be stored for in Chapter 13 and recommend a period of at least 39 months.
Safeguarding data
-
5.81 AV data raises considerable privacy concerns. In Consultation Paper 3 we provisionally proposed that ASDEs should present regulators with details of how data will be recorded, stored, accessed and protected. The regulator should only authorise a system as self-driving if these systems comply with data protection law. Consultees were resoundingly in favour of this proposal. These safeguarding provisions now form part of our recommendations on authorisation.
Registering the ASDE
-
5.82 To be authorised, an AV requires an ASDE to undertake ongoing duties in relation to the vehicle.
-
5.83 A wide variety of organisations may work together to develop self-driving vehicles. They may also use a variety of structures to manufacture vehicles, bring them to market or deploy them on the roads. Whatever the internal structures, we think it is important that a single entity is registered with the authorisation and in-use authorities as the first point of reference in the event of problems.
-
5.84 We recommend that the ASDE must have been involved in the safety assessment. It must submit a safety case and other required documentation. It must also be willing to vouch for the information it has given the authorisation authority. If the information in it is inaccurate the ASDE might be guilty of a serious criminal offence, as discussed in Chapter 11.
ASDE requirements
-
5.85 We recommend that the ASDE must be of good repute and have appropriate financial standing.
-
5.86 These requirements are common in the road traffic sphere and are required for public service vehicle (PSV) or heavy goods vehicle (HGV) operators (for example).224 The Senior Traffic Commissioner provides statutory guidance to traffic commissioners on what amounts to appropriate financial standing225 and good repute.226
Good repute
-
5.87 Within PSV and HGV licensing, a person is not of good repute if they have more than one conviction for a serious offence or a road traffic offence.227 However, Traffic Commissioners have wide discretion in determining whether an applicant is of good repute. 228Traffic Commissioners must have regard to relevant convictions of an employee, officer or agent of an applicant, 229and may also take other considerations into account.230
-
5.88 At this early stage of AV development, we believe that there should be flexibility in relation to what amounts to good repute. This can be adjusted over time as more experience regulating AVs is gained. For this reason, we recommend that the Secretary of State have the power to specify by regulations what amounts to good repute for the purposes of registration as an ASDE.
Appropriate financial standing
-
5.89 As part of the authorisation process the regulator will need to assess whether the ASDE has sufficient funds to ensure they can fulfil their obligations on an ongoing basis. In Consultation Paper 3 we suggested that the ASDE should have sufficient funds accessible to the regulator to respond to improvement notices, to pay fines and to organise a recall.
-
5.90 Some consultees expressed concern that these requirements might be “potentially burdensome” and “prohibitive” for smaller, more agile market participants and thought they might stifle the development of ADS technologies. Others argued that the funds required should depend on the sales model and the number of vehicles, or thought that the regulator should look for suitable insurance cover rather than capital reserves.
The assessment of sufficient resources (including access to sufficient funds if required) should be in the context of the proposed deployment/sales model, not just volume [Five AI]
We propose instead that the ADSE should be responsible for acquiring appropriate insurance. [Oxbotica]
-
5.91 We agree that the appropriate financial standing requirements should not be unduly prohibitive and should be flexible enough to accommodate a wide range of manufacturers and business models. We also agree that the ASDE should be able to show appropriate financial standing in a number of ways. For example, rather than cash reserves, the ASDE might be able to fulfil its financial standing requirements by showing that it has appropriate insurance in place. Accepting insurance as an indication of appropriate financial standing could allow smaller companies and startups to satisfy authorisation authority that they are capable of acting as an ASDE.
-
5.92 Again, we recommend that the Secretary of State should have the power to specify by regulations what amounts to appropriate financial standing.
Duties on the ASDE arising from authorisation
-
5.93 We recommend that an ASDE be required to undertake a range of ongoing duties as a condition of authorisation. The duties will be primarily enforced by the in-use regulator, but the authorisation authority may also become involved if the in-use regulator recommends that authorisation for the vehicle be withdrawn.
-
5.94 At a high level the duties can broadly be divided into those which relate to the safety of the vehicle and those related to disclosure of information to relevant parties.
Duties relating to safety
-
(1) ensuring the vehicle continues to drive safely and in accordance with road rules;
-
(2) making relevant updates where necessary and/or mandated by the in-use regulator, including updates to ensure compliance with road rules;
-
(3) informing users and operators about the vehicle's self-driving features and the limitations of those features.
Duties of disclosure
-
(1) ensuring relevant vehicle data is accessible to insurers and users so that civil claims can be decided justly and fairly. (We discuss this in more detail in Chapter 13);
-
(2) disclosure of data as requested by regulators, including,
-
(a) reporting incidents to the in-use regulator and authorisation authority,
-
(b) providing sample performance data to the authorisation authority and the in-use regulator;
-
(c) submitting relevant evidence where required by the in-use regulator to investigate an incident involving the ASDE’s AVs;
-
(3) co-operating with the road collision investigation unit;231
-
(4) sharing relevant information with local transport authorities, police and emergency services, where necessary for the purposes of improving traffic flow or responding to emergency situations or dealing with road rule infractions.
Recommendation 10.
-
5.97 For a vehicle or vehicle type to be authorised in Great Britain as self-driving as having self-driving features, a prospective Authorised Self-Driving Entity (ASDE) must submit the vehicle or a vehicle representative of the type to the authorisation authority. Before granting authorisation, the authorisation authority must be satisfied that the vehicle or vehicle type:
-
(1) has obtained approval (through one of the GB whole vehicle approval schemes);
-
(2) can drive itself safely and legally even if an individual is not monitoring the driving environment, the vehicle or the way it drives;
-
(3) can record location data for detected collision events and ADS activation/ deactivation; and
-
(4) is supported by a suitable ASDE which has demonstrated its ability to comply with relevant laws (including laws on data protection and environmental protection).
Recommendation 11.
Recommendation 12.
Recommendation 13.
-
(1) assuring their AV will continue to drive safely and in accordance with road rules throughout the lifetime of the vehicle;
-
(2) disclosing information where required by law or if required to do so as a condition of the authorisation process;
-
(3) co-operating with the authorisation authority, the in-use regulator and the road
collision investigation branch.
Recommendation 14.
Recommendation 15.
A NEW LEGISLATIVE FRAMEWORK
-
5.103 In Consultation Paper 3, we provisionally proposed that a new legislative framework should provide regulation-making powers to provide structure to the scheme and ensure consistency and transparency. In particular, regulations should specify:
-
(a) who should assess whether a vehicle is capable of self-driving;
-
(b) the procedure for doing so; and
-
(c) the criteria for doing so.
5.104 This drew overwhelming agreement.232 Several consultees stressed the need for any framework to be flexible. Whilst legislation should establish an authorisation scheme, the criteria to be applied might change, as understanding develops. KPMG commented:
as more data is collected in the UK and abroad, and different regimes develop in other countries, alternative procedures might emerge.233
5.105 We are encouraged that the great majority of consultees agreed that a new legislative framework is needed and should provide regulation-making powers. We also agree that, as far as possible, the framework should remain flexible such that it can be updated in line with the development of AV technology and best practice.
Appeals
5.106 In Consultation Paper 3 we asked for observations on how the current appeals process for type approvals works under regulation 19 of the Road Vehicles (Approval) Regulations 2020. We also asked whether there should be a similar provision which would allow manufacturers to appeal the authorisation decision.
5.107 We received comparatively little feedback on these points. Appeals appear, in practice, to be seldom used in relation to the approval process. Most consultees did not feel as if they knew enough about the current appeals process to provide observations.
5.108 In relation to the authorisation decision consultees generally felt that there would be a need for an appeals process:
We would like to ensure there is a right to appeal for all future AV regulation. [Wayve]
An appeal process is important.... There is a lot that will not be black or white, making technical arguments on benefits vs risks critical. [Bryan Reimer (MIT)]
5.109 Among those who addressed the detail of regulation 19, the main comment was that it only provided applicants with 14 days to appeal. It was suggested that this might not be enough time for developers to re-mount their case for authorisation.
Yes, we agree that the process should be similar but, given limited experience to date, are concerned that 14 days may not be enough time to gather evidence. [Stagecoach Group plc]
5.110 The authorisation decision will follow a more holistic assessment, not just of the technical capabilities of the vehicle but also the ability of the ASDE to take responsibility for its vehicle on an ongoing basis. Given the range of factors the authorising authority will have to consider, we believe that an appeals process is required. We think that prospective ASDEs should have a route of appeal where they have a case that the authorisation authority has erred in their assessment.
5.111 We are sympathetic to the argument that prospective ASDEs should have the time they need to consider their position, take legal advice and put forward an appeal. The effect of any delay would be felt by the manufacturer themselves, rather than a third party. We therefore think that it would be more appropriate to allow 12 weeks to appeal than 14 days.
Recommendation 16.
5.112 The new Act should provide regulation-making powers to specify:
-
(1) the application process and fees;
-
(2) who should assess whether a vehicle is capable of self-driving safely;
-
(3) the procedure for doing so;
-
(4) the criteria for doing so; and
-
(5) the format of a decision (including the outcome for each ADS feature).
The new legislative framework should also require that if authorisation is granted, it should state whether the AV is authorised for use with or without a user-in-charge.
Recommendation 17.
5.113 The new Act should provide a process for appealing against an authorisation decision.
-
Chapter 6: In-use safety assurance
-
6.1 Throughout the course of our consultations we have emphasised that the safety assurance of automated vehicles will be an ongoing process. More so than with conventional vehicles, regulation will be required to ensure that AVs continue to comply with road traffic laws and changes in road infrastructure. As the technology is new, it is also important that AVs are observed under real-world conditions to see if they achieve the standard of safety required or present any unforeseen issues.234
-
6.2 In Consultation Paper 3 we set out our provisional proposals for a regulatory scheme that would ensure that AVs were safe once they were deployed. This scheme would be operated by an in-use regulator who would have the powers to deal with the particular challenges AVs present. Challenges include the safety of software updates, collecting data to compare the safety of automated and conventional driving, and how to communicate with users.
-
6.3 Stakeholders overwhelmingly supported our proposals for an in-use safety assurance scheme (the “in-use scheme”). Most could see the value in having a regulator who was focused on monitoring the safety of AVs after initial approval.
-
6.4 We considered the responsibilities of the in-use regulator and the powers it would require in order to fulfil these responsibilities. We provisionally proposed that the inuse scheme should investigate breaches of traffic rules and apply a flexible range of regulatory sanctions. Again, this drew majority support, with three-quarters of respondents agreeing with the proposal.
-
6.5 In the light of the overwhelming support for our proposals, we now recommend legislation to establish an in-use scheme. In this chapter, we discuss the regulator’s statutory responsibilities and powers under the scheme. We also discuss other topics which are related to in-use safety assurance: a road-user forum to discuss how to apply road rules to AVs, collision investigation and cybersecurity.
A NEW STATUTORY SCHEME
-
6.6 In Consultation Paper 3 we provisionally proposed that legislation should establish a scheme to assure the safety of automated driving systems following deployment. We noted current market surveillance powers available to regulators and proposed that the in-use regulator be given additional powers and responsibilities. We said that these powers should include improvement and redress orders and the withdrawal or suspension of authorisation.
-
6.7 This proposal received overwhelming support. Of the 63 people who responded to this question, 56 (89%) said yes and 7 made other comments. No-one disagreed.
-
6.8 Consultees thought that the safety of AVs would need to be monitored. This was partly because the technology was new and would develop over time - and partly because the driving environment changes:
The safety of these vehicles under real world conditions is yet to be known and both technology and regulation will evolve, an automated vehicle may well comply with driving rules when approved but quickly become out of step with regulation in the years that follow. [AXA]
It is important that there are mechanisms to require improvements, withdraw approval and update standards for future approvals based on operational experience. [CertiCAV]
Recommendation 18.
Should AV authorisation and the in-use scheme have the same regulator?
-
6.12 Increasingly, the dividing line between approval and in-use assessment of motor vehicles is becoming blurred. Systems for software updates and cybersecurity will need to be assessed at the initial approval stage but have more to do with the technical means and processes by which a vehicle will be updated throughout its life cycle. 235This raises the question of whether the original authorisation authority should also be responsible for monitoring the safety of the vehicle once it is on the road.
-
6.13 In Consultation Paper 3 we described how, under retained EU law, vehicle approval authorities and market surveillance authorities must function independently. Vehicle approvals are the responsibility of the Vehicle Certification Agency (VCA) and market surveillance is the responsibility of the Driver and Vehicle Standards Agency (DVSA).
However, the United Kingdom now has the freedom to decide its own policy with respect to Great Britain.236 We sought views on whether the administrator of the inuse scheme should be separate from the authorisation authority or whether the two should be combined in a single body.
-
6.14 In response, more consultees favoured separate bodies than a single body. Out of 63 responses, 29 (46%) were in favour of a separate bodies, 15 (24%) favoured a single body and 19 made other comments.
-
6.15 Those who favoured separate bodies gave two main reasons: (1) that the functions are sufficiently different to require two entities; and (2) that having separate bodies would avoid conflicts of interest. Consultees also said it was desirable to have equivalent structures to EU member states, and that any demarcation issues could be overcome by cooperation.
-
6.16 Many consultees commented that vehicle approval and in-use monitoring are fundamentally different tasks. For example, Pinsent Masons argued that the current position of having two distinct bodies (VCA and DVSA) should remain as the basic framework:
so that the two should have different priorities and different powers, more specifically tailored to the tasks they perform and responsibilities they hold.
that the safety scheme administrators and type-approval authorities should be kept separate to ensure that safety considerations are not compromised by the pressures often seen in type approval.
The advantage of such an approach is that it would bring together expertise and would stop problems from falling between demarcation lines. The number of technical, legal and policy specialists in this area is still small, and it makes sense to concentrate their expertise.
Maintaining the distinction between approval and in-use safety
-
6.19 In this report, we do not make a recommendation about which agency should act as the in-use regulator. We agree with stakeholders that there are advantages to using existing Department for Transport (DfT) agencies; the main one is that they can draw on current in-house administration and expertise and increase staffing levels as time goes on. Similarly, preserving the current distinction might be beneficial whilst experience of regulating AVs is gained.
-
6.20 However, agencies within a department such as DfT may have overlapping functions that are subject to change over time. This is because the powers exercised by an agency are held by the Secretary of State with the agencies acting in the Secretary of State’s name. 237The Secretary of State can therefore reallocate functions or amend the institutional arrangements within a department. Our intention is to preserve a similar level of flexibility here, so that the Secretary of State can reallocate functions to the appropriate agency as time goes on.
Working together
-
6.21 Whichever agency is responsible for the in-use scheme will have to work closely with the authorisation authority. As already touched upon, the dividing line between preplacement and in-use assessment of motor vehicles is becoming increasingly blurred. An example of this can be found in Annex 4 of UN Regulation 157 on Automated Lane Keeping Systems (the ALKS Regulation). This Annex provides that manufacturers should report critical incidents to approval authorities, for example, collisions and potential safety-relevant gaps related to an approved ALKS system. 238The approval authority may be the VCA or it may be in another jurisdiction.
-
6.22 As outlined in Chapter 5, the authorisation scheme will check that an AV has technical approval, can safely drive itself, and conforms with UK specific laws such as those relating to data retention and the environment. If the authorisation authority became aware that the conditions for authorisation were no longer met, it could, under our scheme, suspend or withdraw the authorisation. Such conditions might include the technical approval for a system becoming invalid because the manufacturer has failed to perform its ongoing obligations.
-
6.23 However, should such a situation occur, we think the in-use regulator should be informed because the matter relates to in-use safety and will need to be investigated. The in-use regulator may then decide to issue regulatory sanctions, including civil penalties. Correspondingly, the authorisation authority might aid the work of the in-use regulator by recommending appropriate actions to improve or rectify a particular problem.
-
6.24 This type of co-operation already happens between vehicle approval and in-use authorities. There is currently two-way communication between the VCA and DVSA. The VCA may become aware of an issue with an approval, in which case they would inform the DVSA, who would liaise with the manufacturer to organise the appropriate action for in-service vehicles (such as a recall). Alternatively, the DVSA may become aware of a problem with vehicles in-service, in which case they would inform the VCA as appropriate. The VCA would then consider if there was an issue with an approval which could lead to an amendment or withdrawal of the approval. Often the relevant system approval would be from an overseas authority, in which case there is a formal mechanism for VCA to notify that authority.
-
6.25 We expect that in the early years of AV deployment much will need to be worked out in terms of protocols for engagement and the appropriate distribution of responsibilities between the approval, authorisation and in-use schemes. As we have previously indicated, our intention is to preserve flexibility such that the Secretary of State can re-allocate functions to the appropriate agency as time goes on.
IN-USE SAFETY SCHEME: RESPONSIBILITIES
-
6.26 The in-use scheme would have an overall objective of ensuring the continuing safety and legal compliance of automated vehicles (AVs) while they are in-use on GB roads or other public places.
-
6.27 Broadly speaking, the scheme would have three overarching responsibilities. First, it would compare the safety of AVs with conventional vehicles, evaluating AV safety against the Secretary of State’s published safety standard. Secondly, it would investigate road traffic infractions. Lastly, it would ensure that Authorised Self-Driving Entities (ASDEs) provide adequate information about their vehicles to UICs and NUIC operators. We set out each of these responsibilities in turn.
Evaluating the safety of AVs
-
6.28 In Consultation Paper 3 we described measuring comparative safety as essential. We thought it important that the in-use scheme regulator collect and compare safety data from AVs with data relating to human drivers. This would enable the regulator to validate claims about the safety of AVs and reassure the public about the technology.
-
6.29 However, we also noted the difficulties with making such comparisons. Currently, road safety statistics provide reliable data about rare events (such as fatalities) but less data about more common events, such as minor collisions. Any system to compare safety will need to devise appropriate comparison measures and gather the necessary data for both automated and conventional driving.
-
6.30 Our view in Consultation Paper 3 was that such comparisons would require specialist and dedicated expertise over time. We therefore provisionally proposed that the in-use regulator should be under a statutory duty to compare the safety of automated and conventional vehicles using a range of measures. They should also be given powers to collect the data required.
-
6.31 This drew strong agreement from consultees. In Shoosmiths’ view, the “importance of this comparative analysis cannot be understated as [it will affect] public confidence in ADS”. Stakeholders in the vehicles manufacturing and insurance sectors thought that the regulator should collaborate with industry and other stakeholders when developing metrics for assessing safety.
-
6.32 Many consultees agreed that comparing AVs to human drivers could prove difficult, with several raising privacy concerns about how data would be gathered and used. The RAC Foundation stressed that any monitoring should be by consent:
If the individual is to be monitored they should be aware it is happening and it should be with their consent e.g. by their agreeing to the data being gathered and shared as part of accepting the terms and conditions of a telematic insurance policy. There should also be safeguards on how such information gathered to establish general patterns of behaviour should, or should not, be used in respect of the individuals from whom it is gathered.
-
6.33 For this reason, consultees mentioned the need to anonymise the data. However, these concerns went to the detail of how comparisons would be made, not to the principle itself.
-
6.34 In Chapter 4, we recommended that the Secretary of State should publish a safety standard against which the safety of AVs can be measured. We added that the in-use regular should be under a statutory obligation to collect and publish data to measure the safety of automated driving against this standard. We see this task as central to the in-use regulator’s work. The in-use regulator will have a responsibility to consider all risks associated with automated driving, including problems which might occur following take over, or if users wrongly think that the ADS is engaged while it is not.
-
6.35 We also hope that the in-use regulator will become a world-class source of expertise on the measurement of automated driving safety, commissioning research on a range of possible measures. The literature in this area refers to leading measures (which indicate safety concerns in the absence of actual harm) and lagging measures (which involve harm).239 In our view, the in-use regulator should explore both types of measure so that the Secretary of State can determine how the safety of automated driving should be measured, both generally and for particular types of vehicle.
Recommendation 19.
-
(1) to collect and analyse data to measure the safety of automated driving against the Secretary of State’s published safety standard;
-
(2) to publish their findings; and
-
(3) to explore a range of possible measures to assess automated driving safety.
Recommendation 20.
Investigating traffic infractions involving AVs
-
6.38 In both Consultation Papers 1 and 3 we proposed that where an AV appears to have committed a traffic offence, the matter should be referred to a regulatory authority for investigation. The regulatory authority could then, if necessary, impose civil penalties on the Automated Driving System Entity (ADSE), which we now refer to as the Authorised Self Driving Entity (ASDE).240
-
6.39 There has been strong agreement with this proposal throughout our consultations. In response to Consultation Paper 1, the majority of consultees agreed that if a prohibited manoeuvre is carried out by an ADS, the police should refer the matter to a regulator for investigation. The regulator should then be able to apply a range of regulatory sanctions to the ASDE, including improvement notices, fines and (if necessary) withdrawal of authorisation. Of the 101 consultees who responded to the question in Consultation Paper 1, 84 consultees (84%) agreed and only six disagreed with the proposal that the regulator should investigate such incidents.
-
6.40 In Consultation Paper 3 we asked whether our proposed in-use regulator should have the responsibility to investigate all traffic infractions involving AVs. By “traffic infraction” we meant any driving behaviours which would attract prosecution or a civil penalty if brought about by a human driver.
-
6.41 In Consultation Paper 3 we highlighted that although some contraventions may not be safety critical, they are against the public interest. Additionally, traffic infractions are likely to be an important leading indicator that something has gone wrong with an AV. We thought that instances such as these should be reported to the in-use regulator so that action can be taken.
-
6.42 Consultees overwhelmingly agreed that the in-use regulator should investigate all traffic infractions. Of the 71 respondents who answered, 53 (75%) agreed, 3 (4%) disagreed and 15 (21%) answered "other". Some consultees highlighted additional reasons why the in-use regulator should investigate all traffic infractions involving an AV and not just those which were deemed safety critical. For example, Firstgroup said:
a bus service held up by an automated vehicle which has strayed over the bus lane marking may have a significant adverse impact on up to 100 people, and this needs to be taken into consideration.
We agree that investigating both safety-related and other traffic infractions, including those subject to a penalty charge notice, is appropriate. This investigation would help build a picture of why certain infractions are occurring and provide the understanding to remedy them, improving both safety and compliance. This has the potential not just to relate to a single operator but also to drive improvements across the entire CAV ecosystem. [TfL]
In use monitoring needs to align with behavioural rules and identify anything that goes beyond these rules. Breaches need to be categorised and investigated - in the same way as a collision would be investigated. Learning should be fed back into the development of rules, scenarios generated for validation and safety goals. [PACTS/TRL]
Relying on reports from the police, local authorities and the public
-
6.45 In Consultation Paper 1 we discussed the process for investigating incidents, using speeding as an example. A speed camera detects a vehicle driving at 37 miles an hour in a 30 mile an hour area and the police serve a notice of intended prosecution on the registered keeper. We proposed that if a vehicle was driving itself at the time, the registered keeper would provide the relevant data indicating that the ADS was engaged to the police. If the problem appeared to lie with the software, the police would submit the issue to the in-use regulator.
-
6.46 There was widespread agreement with this approach. In Consultation Paper 3 we said that these proposals remain part of our proposed scheme. 241They would not only apply to speeding but to the range of dynamic driving offences and civil penalties.
-
6.47 Many consultees agreed with us and stressed that the in-use regulator should rely on reports from the police and local authorities in the way we had set out. Otherwise, the task of investigating infractions would be impossibly large for the in-use regulator or duplicate the efforts of the police.
Yes, but only if by investigate you mean process and act upon reports from other agencies, such as local authorities and the police. Otherwise, it would be an impossibly large task, particularly if it covers nonsafety-related infractions, such as driving in a bus lane or blocking a box junction. [The Institute of Highway Engineers]
In order to avoid any overlap between the enforcement powers of local police forces and any regulator(s) - with duplication of effort - we would propose that infractions should continue to be investigated by police in the way, with a power to make referrals to the regulator(s) as appropriate. [BLM Law]
Conclusion: investigating traffic infractions
-
6.49 We recommend that the in-use regulator should investigate traffic infractions and apply sanctions where appropriate to ensure compliance. This proposal is integral to the whole scheme. If the user-in-charge is not liable for dynamic driving offences or for civil penalties arising from moving vehicle infractions, the ASDE must take responsibility for these issues.
-
6.50 When we talk of “investigating” infractions we are not suggesting that the in-use regulator should duplicate the work of the police and local authorities. In practice, we think that most infractions will be brought to light through the normal channels. Often the authorities will only discover that the ADS was engaged at the time of the infraction after they have sent a notice of intended prosecution or a civil penalty notice to the registered keeper. The keeper will need to respond to say that the ADS was engaged at the time. Only once it is established that the ADS was engaged at the time of any infraction would the in-use regulator get involved.
-
6.51 We use the term “investigate” to emphasise that penalties will not be automatic. The ASDE will not simply be given a £130 fine in the way that a human driver would. Once it is established that the infraction has been committed, and that the ADS was engaged at the time, the in-use regulator will need to communicate with the ASDE to establish how and why this happened. In the light of these discussions the regulator should apply an appropriate sanction. As discussed below, the regulator will need to follow a fair process, which gives the ASDE an opportunity to challenge both the finding that there has been a contravention and the sanction.
Who will refer cases to the in-use regulator?
-
6.52 We wish to allow flexibility over how the in-use regulator will receive cases. It is possible that it might receive complaints directly from members of the public. For example, a cyclist who has been cut off by a self-driving car might notify the regulator, and possibly upload dashcam footage on a website.
-
6.53 We would hope that the in-use regulator would remain open to this possibility. However, this is unlikely at first. The cyclist may not know whether the vehicle was in self-driving mode at the time of the infraction, so would need to contact the police. The police would investigate and refer the matter to the in-use regulator if the vehicle was driving itself at the time.
-
6.54 We would also anticipate that the in-use regulator would be open to referrals from insurers. Insurers may become aware of incidents occurring with particular AVs or in particular circumstances which result in claims but do not come to the attention of the police or local authorities.
-
6.55 It is possible that the ASDE might report infractions voluntarily if they become aware of them. In Chapter 5 we discussed how ASDEs should be under a duty to report incidents involving their AVs as a condition of authorisation.242 We also discuss in Chapter 11 the question of a duty of the ASDE to provide safety-critical information to the regulator.243 However at least initially, we do not think that self-reporting by the ASDE will play a significant role in the reporting of infractions. An AV will generally behave as it is programmed to do and may not have the ability to detect that its programming is defective. We suspect that most infractions will arise from failures to notice signs/update maps in response to changes to speed limits and other traffic regulation orders. The ASDE will not be able to report a breach unless it has become aware of the change.
-
6.56 Initially, the great majority of referrals are likely to come from the police and local authorities. We believe the in-use regulator should work with the police and local authorities to establish a protocol so that infractions can be investigated efficiently and effectively without undue duplication of efforts.
Recommendation 21.
-
(1) to investigate traffic infractions referred to it; and
-
(2) if the infraction has been caused by the ADS feature/s, apply a flexible range of regulatory sanctions.
“Traffic infraction” refers to an action (or inaction) which forms part of the dynamic driving task and which (if conducted by a human driver) would make the human driver liable for a criminal offence or civil penalty.
Recommendation 22.
Communication with users
-
6.59 In Consultation Paper 3 we highlighted the degree of public confusion about driving automation. 244We explained that there are already laws to require manufacturers to provide consumers with safety warnings and to prevent misleading marketing. However, the institutional structures for enforcing these laws are diffuse. We provisionally proposed that the in-use regulator should have powers to require ASDEs to communicate information about their AVs in a clear and effective way, including where necessary through training.
-
6.60 There was strong support for this proposal. 245Consultees noted that although AVs have the potential to reduce crashes, they might also increase safety risks if not used properly. Some felt that the manufacturer should provide mandatory training to reduce this risk, whilst others noted the challenges of training different users who might learn in very different ways.
-
6.61 In Consultation Paper 3 we suggested that it was premature to consider changes to the current driving test or a new formal licence category. However, several consultees thought that this might be needed. DPTAC said that:
in principle, anyone who elects to use AV related vehicles should be required to pass a competency-based test (as an extension to a driving licence) in order to drive an AV.
-
6.62 We do not know how difficult users will find it to adapt to AVs. At this stage, we are not recommending mandatory additional training. As the technology is in its infancy, there is, as yet, little upon which to base a standardised test. However, we envisage that, for the most part, using an ADS feature (including engaging and disengaging the ADS) will be designed to be as intuitive as possible.
-
6.63 That said, users of AVs do need to understand their responsibilities and liability in relation to the driving task, especially where the user is expected to act as a user-in-charge. It is therefore crucial that the in-use regulator should ensure that ASDEs communicate information about what the user must and must not do in a clear and effective way.
-
6.64 Regulation 12 of the General Product Safety Regulations 2005 (the GPSR) already gives enforcement authorities the following power:
-
(1) Where an enforcement authority has reasonable grounds for believing that a product is a dangerous product in that it could pose risks in certain conditions, the authority may serve a notice (“a requirement to mark”) requiring the person on whom the notice is served at his own expense to undertake either or both of the following, as specified in the notice—
-
(a) to ensure that the product is marked in accordance with requirements specified in the notice with warnings as to the risks it may present,
-
(b) to make the marketing of the product subject to prior conditions as specified in the notice so as to ensure the product is a safe product.
-
6.65 We do not think that Regulation 12 goes quite far enough. The in-use regulator will need powers that are not confined to “marking the product” or initial marketing. Instead, the in-use regulator should have power to require ASDEs to provide suitable, clearly worded and easily comprehensible information to owners, users-in-charge and registered keepers throughout the life of the vehicle.
Recommendation 23.
-
6.66 The in-use regulator should have power to require ASDEs to provide suitable, clearly worded and easily comprehensible information to owners, users-in-charge and registered keepers throughout the life of a vehicle.
NEW POWERS TO APPLY REGULATORY SANCTIONS
-
6.67 In Consultation Paper 3 we highlighted that our proposed system of enforcement would give the in-use regulator new powers to apply regulatory sanctions. We discussed previous work the Law Commission published in 2010 on how criminal enforcement and regulatory sanctions should be used in a regulatory context.246
-
6.68 The 2010 paper noted the wide and flexible range of non-criminal sanctions made available to regulatory bodies under the Regulatory Enforcement and Sanctions Act 2008. These include fixed monetary penalties, stop notices or enforcement undertakings (by which the business agrees to take specific actions to prevent a problem from recurring or remedy the damage caused). Sanctions such as these enable a more proportionate, speedy response to regulatory breaches. Criminal sanctions can, by contrast, be expensive, take a long time and give uncertain outcomes.
-
6.69 In Consultation Paper 3 we proposed that the in-use regulator should have the ability to make use of:
-
(1) informal and formal warnings;
-
(2) fines;
-
(3) redress orders;
-
(4) compliance orders;
-
(5) suspension of authorisation;
-
(6) withdrawal of authorisation; and
-
(7) recommendation of attendance at a restorative conference.
-
6.70 The great majority of respondents agreed. Of the 68 consultees who responded to this question, 58 (85%) thought that the regulator should have the power to impose all of these sanctions and only one thought they should not.
-
6.71 In agreeing, consultees stressed the need for a wide range of graduated sanctions:
We agree that each of these could have a place in a regulator's toolkit, where measures are gradual and proportional. We suggest the approach taken by this regulator should encourage mutual learning in the industry during early AV deployments. [Wayve]
-
6.72 Some consultees did have specific concerns though. The SMMT, for example, thought that the ASDE must be informed of the offences and shown the evidence, with provision made also for self-reporting and collaborative investigation.
-
6.73 We note that there are existing powers under the GPSR that give the DVSA the ability to issue recall notices for motor vehicles in the UK. However, we are keen to provide the in-use regulator with a wide range of sanctions, which can be used flexibly to deal with the many uncertainties in this area. With 85% of consultees supporting this proposal in its entirety, we believe that there is a mandate for the in-use regulator to be given the power to impose the proposed regulatory sanctions.
-
6.74 The main alteration to our proposal is in relation to withdrawal of authorisation. As authorisation will be given by the authorising authority, we think that the authorisation authority should also formally withdraw it. Where appropriate, the in-use regulator should recommend withdrawal of authorisation to the authorisation authority. The authorising authority would then make a decision about whether to act upon the recommendation. We discuss this below at 6.105. We also now refer to “fines” as civil penalties, to distinguish more clearly between regulatory and criminal sanctions.
-
6.75 Here we consider the sanctions in more detail. First, we look at the existing powers of recall in relation to motor vehicles. We then look at each recommended sanction in turn.
Existing powers under the General Product Safety Regulations 2005
Where an enforcement authority has reasonable grounds for believing that a product is a dangerous product and that it has already been supplied or made available to consumers, the authority may serve a notice (“a recall notice”) requiring the person on whom it is served to use his reasonable endeavours to organise the return of the product from consumers to that person or to such other person as is specified in the notice.247
-
(1) any other action would be insufficient to prevent the risks to health and safety;
-
(2) the action currently undertaken by the producer or the distributor is unsatisfactory or insufficient to prevent the risks; and
-
(3) the authority has given the producer or distributor a minimum of 7 days’ notice.248
-
(1) a suspension notice, prohibiting a person from supplying or distributing the product for a period of time;249
-
(2) a requirement to mark the product with warnings about the product;250
-
(3) a withdrawal notice, prohibiting any further placement on the market.251
-
6.79 An appeals process enables producers or suppliers to challenge the decisions of the enforcement authority to issue these safety notices.252
-
6.80 The DVSA has issued a code of practice setting out how they exercise these powers in the automotive sector. Where a safety defect has been found, the producer or manufacturer is expected to agree a plan with the DVSA which might include:
must not be driven.
“reasonable” consumer action.
maintenance or similar checks. This may be used with a recall.
maintenance or servicing requirements can detect a potential problem and avoid the defect.253
-
6.81 Under our recommended scheme, the in-use regulator will have these existing powers to issue a recall notice, and this does not need primary legislation. However, in practice, recalls alone will not be sufficiently flexible enough to deal with range of issues that AVs present. Nor would they give the in-use regulator sufficient flexibility to deal with a non-compliant ASDE. For this reason, we recommend that the in-use regulator should have power to apply further regulatory sanctions (as set out below).
Warnings
require extensive administrative resources to administer.254 However, warning notices are most effective when they are backed with credible threats of further sanction. As the Macrory report on making regulatory sanctions effective explains:
advice and incentives should play a key role in ensuring regulatory compliance, and should normally be the first response of regulators. Nevertheless, an effective sanction regime plays an equally vital role in a successful regulatory regime. It underpins the regulator’s advisory functions, and its very existence will often act as an inducement to compliance without the need to invoke the formal sanctions.255
-
6.83 Formal warnings are used in the financial sector. For example, the Financial Conduct Authority (FCA) is required to issue a warning notice if it is considering imposing a penalty on an authorised person.256 The recipient then has the right to make representations to the FCA. In the light of these representations, the FCA decides whether to issue a decision notice.257
-
6.84 In response to Consultation Paper 1, several respondents stressed that the regulator should start with a co-operative approach. There may be many reasons why problems have occurred, from the user’s failure to update, to difficulties in communicating traffic regulation orders. The system should allow for discussion and informal advice as well as more formal warnings. We agree.
Civil penalties
-
6.85 Civil penalties will be a key regulatory sanction in our scheme.258
-
6.86 In Consultation Paper 3 we provisionally proposed that the regulator should have discretion over the amount of any monetary penalty. Most consultees agreed. However, industry representatives raised two concerns. The first was that the regulator should develop and publish a framework to ensure that sanctions are proportionate and consistent. The second was that legislation should set a maximum amount. We consider each concern in turn.
A published framework
-
6.87 The SMMT suggested that the in-use regulator should publish a public statement setting out its approach to sanctions. We agree. It is important that penalties are applied in a consistent way, according to established principles.
-
6.88 This does not require primary legislation. Rather it can be achieved through a statutory instrument, making the in-use regulator subject to sections 21 and 22 of the
Legislative and Regulatory Reform Act 2006. Under these provisions, regulators must carry out regulatory activities in a way that is transparent, accountable, proportionate and consistent. They must also have regard to the Regulators’ Code. In turn, the Regulators’ Code requires regulators to “publish a clear set of service standards”, including information on their enforcement policy, explaining how they respond to non-compliance.259
Setting a maximum amount
-
6.90 Maximum penalties are common in regulatory regimes. In the UK the Information Commissioner, the Office of Communications (Ofcom) and the Office of Gas and Electricity Markets (Ofgem) all run regulatory regimes with the power to issue civil penalties subject to legal maximums.260 Similarly in the USA, the civil penalties issued by NHSTA for infringements of statutory motor vehicle safety standards are subject to fixed maximums.261
-
6.91 Some consultees to Consultation Paper 3 noted that any penalties issued by our inuse regulator should not be disproportionate. We agree, and believe that the power to set a maximum should be established in regulation. There are different ways that this could be done. One option is to define maximum penalties in terms of a fixed sum applicable to a single violation or a fixed sum applicable to a related series of violations. Alternatively, maximum penalties might also be defined in terms of a percentage of a regulated party’s total annual worldwide turnover. The UK Data Protection Act 2018, for example, sets a maximum fine of £17.5 million or 4% of annual global turnover, whichever is greater.
-
6.92 However, we do not believe it is appropriate for the Law Commissions to determine the amount of any maximum penalty or the way it should be done. Instead, we leave this issue for Government to determine.
Redress orders
-
6.93 It is now common for regulators to have powers to provide redress. In the energy sector, for example, legislation distinguishes between penalties and consumer redress orders. While penalties must be paid into the consolidated fund, consumer redress orders can be used to compensate customers affected by the consequences of a contravention. Following a power outage in August 2019, for example, three energy firms agreed to pay £10.5 million into Ofgem’s redress fund to compensate homes and businesses left without electricity.262 Where “it is impractical to identify all affected consumers, payment could, for example, be ordered to a proxy group or to a suitable fund to recognise wider detriment to the market”.263
-
6.94 In our view the legislation on automated driving should include provision for both civil penalties and redress orders. Redress orders would not be needed to recompense individual victims, who would be paid by the insurer under section 2 of the Automated and Electric Vehicles Act 2018. However, redress orders could be used in other circumstances. For example, if AVs repeatedly misused bus lanes, a redress order could compensate bus passengers for longer journey times.264
Compliance orders
-
(1) update software, where an update is needed to ensure safety and continued compliance with the law;
-
(2) keep maps up-to date, where an AV relies on maps to ensure safety and compliance with the law; and
-
(3) communicate information about an AV in a clear and effective way, including where necessary through training.
-
6.96 There was substantial support for this proposal. Out of 65 responses to this question, 51 (78%) consultees replied yes and only one replied no. However, several industry consultees said that the regulator should not prescribe how these things are to be done.
-
6.97 Five AI said that “It would be undesirable to empower the regulator to require the ASDE to take a specific action” if that action then caused a regression elsewhere.265 However:
it may be possible to fix the issue using one of a number of different approaches (for example, a software update, hardware change, process change (e.g. new calibration method), an ODD change (a new route) or an infrastructure aid change) and the ADSE may consider a different approach is better. For example, the ADSE may prefer to upgrade the sensor hardware on a vehicle rather than the software to fix an issue with an AV hesitating to merge into a lane.
-
6.98 Similarly, Oxbotica queried whether there would be “expertise within the regulator to determine” what steps should be taken. The SMMT also made a similar point, stressing “technology neutrality”: although it was an ASDE’s responsibility to take appropriate action to ensure their systems remained compliant, this may potentially be done in a variety of ways.
-
6.99 We think it is essential that the in-use regulator has power to issue compliance orders to require ASDEs to take steps to resolve safety concerns, eliminate malfunctions and comply with the law. We envisage a system in which the most serious penalties are imposed for failure to respond appropriately to a compliance order. However, we accept that at this stage of development it is likely that the ASDE will have much greater understanding of how a system works than the regulator. Therefore, for technical issues, involving changes to software or hardware within the vehicle, the regulator should specify the result to be achieved, rather than the means for doing so.
-
6.100 When it comes to requiring communication with users, we think that the regulator should have power to be more specific.266 It should, for example, be able to mandate the use (or non-use) of words, phrases or symbols, if its own research or consultation shows this to be the best way forward.
Suspending and withdrawing authorisation
-
6.101 Perhaps the most serious regulatory sanctions in our proposed in-use scheme are recommendation of withdrawal or suspension of authorisation. In our view, these sanctions are appropriate in extreme cases where an ASDE has committed a serious breach or fails to act when the in-use regulator issues a compliance order. They would be a “last resort”, after lesser regulatory sanctions have proved ineffective, and hopefully would rarely need to be used.
-
6.102 In both the aviation and rail sectors, regulators have powers to withdraw or suspend authorisation for operation. For example, the Civil Aviation Authority (CAA) has powers to regulate all UK airlines to ensure they comply with international safety standards. The CAA may issue operational and airworthiness directives. Operational directives allow the CAA to prohibit, limit or make conditional the operations of an aircraft operator. For aircraft on the UK register the CAA may also issue mandatory Airworthiness Directives (ADs). ADs are issued to address unsafe conditions. Where an operator fails to comply with an AD the aircraft is no longer considered airworthy and operations must be stopped.
-
6.103 In the rail sector, in order to be placed into service, all infrastructure or rolling stock must be authorised or certified by the Office of Rail and Road (ORR).267 For infrastructure, operators require a safety authorisation, while for vehicles, a safety certificate is required.268
-
6.104 Regulation 16 of the Railways and Other Guided Transport Systems (Safety) Regulations 2006 provides that the ORR “shall revoke a safety authorisation if it is satisfied that the conditions of that authorisation are no longer met and there is a
significant safety risk arising as a result”. The ORR must, before revoking either an entire safety certificate or a part of it, notify its holder that it is considering revocation and give them the opportunity to make representations.269
-
6.105 In the most serious cases, the in-use regulator should be able to act quickly to suspend authorisation. However, we think withdrawing authorisation should be a matter for the authorisation authority. 270So rather than withdraw authorisation, the inuse regulator should make a formal recommendation to the authorisation authority that authorisation is withdrawn. This may relate either to a specified ADS feature or to the vehicle as a whole. Crucially, this will not detract from the authorisation authority’s independent power to suspend authorisation temporarily or permanently.
Restorative conferences
6.107 Restorative conferences encourage a greater understanding between all those directly affected by an incident. In 2006, the Macrory report looked at sanctioning regimes and penalty powers in detail.271 The Macrory report received overwhelming support from consultees for the use of restorative conferences. 272An example of their use is by the Australian Competition and Consumer Commission following the mis-selling of insurance policies to Aboriginal communities. Senior insurance company managers came away ashamed from visits to remote communities where they met with the victims of insurance mis-selling, local Aboriginal community councils and local officials. 273The company ultimately agreed to compensate policyholders, establish an education fund for financial literacy and conduct an internal inquiry. These outcomes were significantly better than could have been expected through litigation.
6.108 In the context of AVs, restorative conferences could be appropriate in some circumstances.274 Following a death or serious injury, for example, senior managers from the ADSE could meet the victim and/or their family face-to-face to discuss why the accident happened and what steps were being taken to ensure that it never happened again. As with the other proposed regulatory sanctions, consultees were overwhelmingly in favour of this power.
Appeals
6.109 In Chapter 5 we recommended that the new legislative framework for AV authorisation should set out a process for appealing against the decision of the authorisation authority. Similarly, we also believe that there should also a process for appealing against regulatory sanctions imposed by the in-use regulator.
6.110 Appeals processes are a typical feature of regulatory sanction schemes. For example, under section 162 of the Data Protection Act 2018, a person who is given an information, assessment, enforcement, or penalty notice by the Information Commissioner has a right of appeal. 275 Similarly the Competition Act 1998 makes provisions for persons aggrieved by a decision by the Competition and Markets Authority (CMA) to bring appeals in relation to that decision.276
6.111 In line with other regulatory sanctions schemes, we recommend that the new Act which establishes the role of the in-use regulator and gives it powers to enforce its findings, should also set out an appeals process.
Recommendation 24.
-
(1) informal and formal warnings;
-
(2) civil penalties;
-
(3) redress orders;
-
(4) compliance orders;
-
(5) suspension of authorisation;
-
(6) recommendation of withdrawal of authorisation; and
-
(7) recommendation of attendance at a restorative conference.
Recommendation 25.
Recommendation 26.
Recommendation 27.
Recommendation 28.
SEARCH WARRANT POWERS
-
6.117 At present, if the police have reasonable grounds for believing that an offence has been committed, they may apply for a warrant to enter and search premises for evidence. 277“Premises” includes vehicles. 278The problem is that, under our scheme these powers will no longer apply once it is clear that the ADS was engaged at the time of the incident as, in those circumstances, no offence will have been committed.
-
6.118 This suggests that the in-use regulator will also need powers to apply for warrants to obtain this information so that they can investigate possible infractions. It is common for regulators to be given search warrant powers. A recent Law Commission report into search warrants published in 2020 identified 176 search warrant provisions contained in 138 separate pieces of legislation.279
-
6.119 The search warrant powers of different regulatory bodies vary in both the grounds for issuing a search warrant and the conditions under which such warrants can be executed. The Financial Conduct Authority, the Competition and Markets Authority, the Information Commissioner and Ofcom are all examples of regulators who apply for and execute search warrants as part of specialised regulatory investigations.
Agencies within DfT such as the VCA and DVSA also have search warrant powers.280
-
6.120 As the Law Commission report discussed, warrants issued as part of a specialised and regulatory investigation need not be targeted towards prosecution. Instead they might offer a more general way to ensure that the regulator can obtain information from relevant parties. It identified three broad conditions which commonly apply to the issue of a search warrant in the context of specialised investigations:
-
(1) a notice or order to produce the required information / documents has been issued but not complied with; or
-
(2) a notice or order to produce the required information / documents has not been given but would not be complied with in any event; and/or
-
(3) if a notice or order to produce the required information / documents were given, it is likely that the material would be destroyed, removed or tampered with.281
-
6.121 Ideally, the in-use regulator would, in most circumstances, not be required to use search warrant powers. Rather the regulator would request specified information or documents from the ASDE and the ASDE would be forthcoming. This is in line with our aim of fostering a safety-first culture where regulators and ASDEs can collaborate to promote safety.
-
6.122 However, should an ASDE not comply with requests for information, we believe that the in-use regulator, similarly to the police, should have the power to obtain information by way of a search warrant. We also consider that a search warrant should be available in cases where, if a notice or order to produce the required information / documents were given, it is likely that the material would be destroyed, removed or tampered with.
Recommendation 29.
SHOULD THE REGULATOR HAVE A CONSUMER PROTECTION ROLE?
-
6.124 In response to our proposals on withdrawal of authorisation, one stakeholder asked how consumers would be compensated if a self-driving feature is suspended. This links to the question of whether the in-use regulator should have a consumer protection role.
-
6.125 We considered this in Consultation Paper 2. We noted that consumers who pay a significant purchase price for an AV may be faced with considerable ongoing updating and maintenance costs. At least initially, these may be difficult to anticipate. Furthermore, concerns about safety, cyber-security and the protection of intellectual property may reduce access to independent aftermarket providers, such as repair shops. The costs of updates, repairs and spare parts may not be subject to competitive pressure.
-
6.126 In Consultation Paper 2 we asked if the safety assurance agency should ensure that consumers are given information about these costs before they buy an AV. This received a mixed response, with just over half (59%) saying that the new regulator should have such a role. However, many people thought that consumer protection should not be the responsibility of a safety assurance agency. SMMT put this point forcefully:
Centralising both the pre-deployment approval and post-deployment regulation of consumer affairs and market surveillance under one unitary authority creates confusion and blurs the focus of this agency. These responsibilities can be adequately performed by existing agencies, namely the Advertising Standards Authority in respect of regulating consumer and marketing materials and the Competition and Markets Authority in respect of market surveillance.
-
6.127 In practice, the issue of costs will be linked to the issue of compensation when selfdriving features are suspended or withdrawn. If consumers find that they are paying high and surprising costs for self-driving features which rarely work, this is likely to generate complaints. The question is whether the in-use regulator should play a role in resolving those complaints - by, for example, requiring clearer price information or price rebates when features do not work.
-
6.128 Our view is that the in-use regulator should focus on safety concerns. It should not become distracted by consumer protection issues. Existing legislation such as the Consumer Rights Act 2015 already affords consumers protection in relation to goods such as motor vehicles and digital content which may be supplied with them. This existing consumer protection legislation is applied by the Competition and Markets
Authority which already has responsibilities to protect consumers and investigate problems in certain markets or sectors.
OPEN TO EXTERNAL VIEWS
-
6.129 When AVs are deployed on public roads, they will have the potential to affect all road user groups. There is also much that will be learnt about AVs by local authorities, academics and road safety groups over time. In Consultation Paper 3 we asked what formal mechanism might ensure that the regulator is open to these external views (such as duties to consult or an advisory committee).
-
6.130 In all, 55 respondents answered this question, of whom 26 favoured an advisory committee and 14 supported a duty to consult, with some arguing for both.
-
6.131 Those who favoured an advisory committee pointed to the range of expertise that could be included. The Urban Transport Group said that “it makes sense to draw upon the expertise of road user and safety groups, provided that a range of views are sought and that no single group of road users is allowed to dominate over others”.
-
6.132 DPTAC commented:
In the first instance, the establishment of a professional body consisting of the manufacturing sector, agencies with a service provision for enabling technology for AVs (eg SatNav), and users of AVs would most likely be very helpful. This could take the form of a working group to enable discussions to take place to progress issues, which need to be resolved as they arise.
-
6.133 Consultees also mentioned a variety of other mechanisms to ensure openness and transparency. KPMG thought it important to record meetings with outside interests. Highways England thought that transparency could be embedded into processes, for example, by requiring the in-use regulator to undertake Regulatory Impact Analyses. Other consultees thought that there should be independent oversight: for example, George Atkinson wrote:
Just as the HM Inspectorate reports on the effectiveness of policing and other bodies so the Regulator should come under similar scrutiny. Further, the Regulator will be of great interest to a Parliamentary Select Committee, their presence and actions closely monitored and challenged by road safety organisations.
-
6.134 We agree with consultees that there is a need for the in-use regulator to be open and transparent. In our view, the principle should be set out in legislation: in the furtherance of its responsibilities, the regulator should be required to take steps to engage with and involve those with an interest in the safety of automated vehicles, including local traffic authorities, the emergency services, road user groups and experts in the field. The regulator would have discretion about how this principle is implemented: it might establish one or more advisory bodies, or find other ways to involve stakeholders.
Recommendation 30.
-
6.135 The in-use regulator should be under a duty to engage with those with an interest in the safety of automated vehicles, including local traffic authorities, the emergency services, road user groups and experts in the field.
A FORUM TO COLLABORATE ON ROAD RULES
-
6.136 Throughout our consultations we have seen strong public concern about road rules. This concern has led to a series of Government and regulatory initiatives. The latest example is the proposed changes to the Highway Code laid before Parliament on 1 December 2021.282 This followed a review of the Highway Code to improve the safety of vulnerable road users. The proposals include new rules about overtaking, passing distances, priority at junctions and opening vehicle doors. 283If approved by Parliament, the changes will come into force at the end of January 2022.
-
6.137 In Consultation Paper 3 we noted that these proposals demonstrate a trend towards replacing guidance with rules. One proposed change, for example, is that there should be quantified rules about how much distance a vehicle should leave when passing pedestrians, cyclists and horse riders. Generally, the proposals require a minimum passing distance of 1.5 metres at lower speeds, and 2 metres at higher speeds and for larger vehicles. 284This is more specific than current guidance which advises drivers to give vulnerable road users at least as much room as they would another vehicle when overtaking.285 These developments point to a formalisation of previously less precisely formulated driving behaviours.
-
6.138 However, we do not think it would be appropriate for Government to attempt to design an all-encompassing precise “digital road rules book” which can be programmed into automated driving systems. After analysing the response to Consultation Paper 1, we concluded that a digital rule book that sets precise rules for every instance is not possible. It is impossible to predict all future scenarios in advance and an expectation that regulators should do this would place an impossible burden on them. In the same way, it is not realistic to ask developers to prescribe the behaviour of ADSs in advance for every scenario.
-
6.139 However, in Consultation Paper 3 we said that it was possible to provide a more structured dialogue between developers and regulators, which would allow developers to raise issues of concern. Regulators cannot provide precise rules, but they can set out broad principles for developers to follow. They can also ensure good information conduits with developers, so that systems can adapt to the many new initiatives in this area. We therefore proposed that the Government should establish a forum for collaboration on the application of road rules to automated driving.
Consultees’ views
-
6.140 The vast majority of respondents agreed with this proposal. Of the 75 respondents, 71 answered “yes” (95%), and 4 (5%) answered “other. No one disagreed with the proposal.
-
6.141 The main reasons for agreeing with this proposal was that it would promote safety and consistency, and would facilitate discussion between developers, regulators and road users. Some consultees also thought that a UK forum should also cooperate with international work on AV safety.
We agree so long as such a forum is neither parochial nor divorced from the wider discussion required to assure that there is no unexpected or unwarranted divergence in the expected behaviour of autonomous vehicles in different jurisdictions. This appears to us to be an area where the focus should be on international cooperation. [Faculty of Advocates]
Behaviour rules have started to be developed by software developers - where possible this existing understanding should be built upon rather than starting from the beginning. There needs to be established rules and a process for adapting and amending these to reflect developments and learning.
A dialogue between developers and regulators regarding the application of road rules to self-driving vehicles is desirable. However, eventually, it is the concern of the state, in accordance with its priorities, to determine principles and precise rules for ADSEs to follow. In Mobileye's opinion, creating a digital code for this purpose is possible and desirable, and Mobileye's RSS could serve as a basis for such code....
Mobileye is aware that the Law Commission's current stand is that a digital highway code that sets precise rules for every instance is not possible.. However, after years of research and testing Mobileye stand behind its position that the RSS can do just that.
-
6.144 Mobileye invited the Law Commissions to continue dialogue and to reconsider the feasibility of a code based on their Responsibility-Sensitive Safety Model (RSS). It also stressed the importance of programming AVs “so they will be allowed to depart from road rules when it is safe and in order avoid collisions”.
-
6.145 Another developer, Motional, also advocated working with international organisations with the eventual goal of creating “a comprehensive behavioural model”. Similarly, Professor Sally Kyd agreed that the forum should be advisory. However, she also thought that, over time, it should develop a version of the Highway Code for AVs.
A diverse range of relevant stakeholders including road safety organisations, emergency services, vehicle manufacturers, software engineers, data managers, insurers, etc. should be represented.
Conclusion
6.147 With 95% of consultees agreeing with our proposal, we continue to think that the UK Government should establish a forum to collaborate with developers on how road rules apply to automated driving. Given the many uncertainties, we are not minded to recommend a specific statutory duty prescribing the way in which the UK Government should establish a forum at this stage. However, we think that the in-use regulator and approval authority should be part of such a forum and hold discussions with developers and the public. The forum should consider how road rules and other traffic laws might be adapted for automated driving. We do not envisage that the forum would have any power to change road rules itself. Instead it should make recommendations to the UK Government, devolved administrations and local government.
Recommendation 31.
6.148 The UK Government should establish a forum for collaboration on how road rules, traffic laws and guidance such as the Highway Code should apply to automated driving.
COLLISION INVESTIGATION
6.149 In Consultation Paper 3, we proposed that a specialist collision investigation unit should be established to analyse data on collisions involving AVs; to investigate the most serious, complex or high-profile collisions; and to make recommendations to improve safety without allocating blame. This unit would be separate from the in-use regulator but provide independent reports with recommendations which could be used by the in-use regulator to improve safety. This unit would be constituted similarly to accident investigation branches in the aviation, rail and maritime sectors.
6.150 A clear majority of respondents agreed with this proposal. Of the 82 respondents, 67 answered “yes” (82%) and only 4 (5%) answered “no”. Respondents who agreed with the proposal highlighted that a specialist accident investigation unit would be needed for AVs as these investigations would require new types of expertise. Others also highlighted that the independent investigation of incidents could inform the safety assurance process:
If automated cars malfunction, they are likely to do so in ways which are unfamiliar to coroners or police officers. Understanding the causes of such failure will involve new types of expertise. [Royal Society for the Prevention of Accidents (RoSPA)]
An independent collision investigation unit with trained personnel could provide huge insight into how to reduce collisions. Especially where there is a novel pattern, for example, where oddities in the road design could have been a contributing factor across systems from multiple ADSEs. [Oxbotica]
6.151 Given the high level of support for specialist collision investigation we are recommending that an independent collision investigation unit be given responsibility for investigating serious, complex or high-profile collisions involving AVs.
6.152 We note that currently the RAC Foundation in collaboration with the DfT and National Highways are undertaking a project to investigate the feasibility of a road collision investigation branch (RCIB). The project has published papers already and is due to produce a final report in 2022. 286This unit would be a specialist investigation unit for all road traffic accidents, not just those involving AVs. In October 2021, DfT also launched a consultation asking for public views on the creation of a RCIB.287
6.153 In the absence of final recommendations from the RAC Foundation, and because the government is consulting on the matter, we have not sought to allocate responsibility for AV collisions to a road collision investigation unit. However, we believe that if such a road collision investigation unit were to be established, it would be preferable to give this unit responsibility for investigating collisions involving AVs - which would avoid duplication of effort. As many stakeholders have also indicated, at least in the initial stage of deployment, collisions involving AVs are likely to involve conventional vehicles as well.
Recommendation 32.
6.154 An independent collision investigation unit should be given responsibility for investigating serious, complex and high-profile collisions involving automated vehicles.
CYBERSECURITY
-
6.155 Although cybersecurity lies outside our remit, it forms a crucial part of ongoing safety assurance. In Consultation Paper 3 we said it was important to be clear about the institutional responsibility for cybersecurity. We therefore asked if the in-use regulator should be responsible for this area.
-
6.156 The overwhelming majority of consultees thought that the in-use safety assurance scheme should be responsible for cybersecurity. Out of 54 responses, 49 (91%) said yes and only 3 said no.
-
6.157 Consultees stressed how cybersecurity and safety would be linked:
it is fundamentally almost impossible to separate safety and security in automated vehicles.... The issues of safety and security must be considered in tandem as cybersecurity is the most important building block in ensuring safety of automated vehicles. [Blackberry]
-
6.158 A few consultees thought that, given the rapid rate of change in the cybersecurity sector, it might not be feasible for the in-use regulator to embrace the issue. Rather the in-use regulator should work with other agencies which specialise in cybersecurity.
-
6.159 Only three consultees disagreed with giving responsibilities to the in-use regulator. These consultees highlighted that UN Regulation 155 on Cyber Security and Cyber Security Management System adequately covers cybersecurity. The SMMT, for example, felt that the “UK should fully apply [Regulation 155] instead of considering a scheme that at best duplicates, or at worst undermines, it”.
-
6.160 Regulation 155 requires that manufacturers put in place a system of cybersecurity measures for a given vehicle type. An approval authority then verifies that the manufacturer has, amongst other things, taken the necessary steps to:
-
(a) collect and verify the information required under the Regulation through the supply chain so as to demonstrate that supplier-related risks are identified and are managed;
-
(b) document risks assessment (conducted during development phase or retrospectively), test results and mitigations applied to the vehicle type, including design information supporting the risk assessment;
-
(c) implement appropriate cyber security measures in the design of the vehicle type;
-
(d) detect and respond to possible cyber security attacks; and
-
(e) log data to support the detection of cyber-attacks and provide data forensic capability to enable analysis of attempted or successful cyberattacks.288
-
6.161 The duty to maintain the systems and account for current risks is ongoing. Approval for the systems may be withdrawn by the original approval authority if it comes to light that the system no longer conforms to the specifications of Regulation 155. Manufacturers who gain approval in accordance with this regulation must maintain and keep their cybersecurity systems up to date throughout the life cycle of a vehicle. The UK’s vehicle approval agency, the VCA, is currently developing its expertise on cybersecurity as it relates to Regulation 155.
-
6.162 Cybersecurity is however a large and complex area and the subject of several Government initiatives. For example, in 2016, the Government established the National Cyber Security Centre (NCSC) to advise both public and private sector organisations in the UK on cybersecurity risks. Such organisations may in the future, as consultees have suggested, support the work of the in-use regulator in relation to cybersecurity.
-
6.163 As with other recommendations in our report, our intention is to preserve flexibility so that the Secretary of State can re-allocate functions to the appropriate agency as time goes on. In time it may emerge that other agencies, such as the authorising authority, DVSA or VCA, are better placed to have oversight over cybersecurity matters related to the ongoing safety of AVs.
-
6.164 However, in the absence of any concrete alternatives, we recommend that the in-use regulator should have oversight for this important area. The in-use regulator should have responsibility for developing and encouraging best practice with regards to ongoing AV cybersecurity. Additionally, where a lack of security gives rise to a safety concern, the regulator’s powers to deal with safety concerns should apply.289
Recommendation 33.
Chapter 7: Marketing of driving automation
-
7.1 In Chapter 5, we recommend a process to authorise AVs that can safely drive themselves for whole or part of the journey without human monitoring. Vehicles will be authorised with specified self-driving features which can be used either with or without a user-in-charge.
-
7.2 Feedback to both Consultation Paper 1 and Consultation Paper 3 resoundingly agreed that “unauthorised automated driving systems should be prohibited”. 290In our summary of responses, published in July 2021, we said that we would give further thought to the definition of an ADS for these purposes:
An ADS is normally defined in terms of hardware and software “that are collectively capable” of performing the entire dynamic driving task on a sustained basis. However, we most wish to prohibit systems that are not “capable” of safely performing the dynamic driving task but which give the impression of being self-driving.... We therefore think that the prohibition should be aimed at unauthorised systems which purport (through marketing for example) to be self-driving or which give users the (false) impression that the user does not have to monitor the driving environment.291
-
7.3 If businesses can describe driving automation technologies 292as “self-driving” even when those technologies have not been authorised, the effectiveness of the safety authorisation scheme is undermined.
-
7.4 Evidence suggests that many drivers are currently confused about which systems are or are not self-driving. 293This has the potential to be dangerous by encouraging people to think that they do not need to be fully engaged in the driving task, even for a technology which provides mere assistance. This problem is aggravated if marketing gives drivers the misleading impression that they do not need to monitor the road while driving.294
-
7.5 In this chapter, we make recommendations to prevent unauthorised driving automation from being marketed as self-driving, or in a way likely to confuse drivers into thinking they do not need to pay attention to the road.
DRIVING AUTOMATION THAT IS NOT SELF-DRIVING
-
7.6 As we explain in Chapter 2, the term “driving automation” covers the full range of driving technology, from driver support features to ADS features capable of carrying out the whole dynamic driving task.
-
7.7 In Chapter 5 we consider safety assurance for vehicles before they are permitted on the road. We recommend a two-stage process: approval and authorisation. A vehicle equipped with driving automation features may receive GB Whole Vehicle Approval but may not be authorised. Approved but unauthorised vehicles will be allowed on the road, but their features will not be self-driving under UK law.295 The person in the driving seat is not a user-in-charge but simply a driver, with full responsibility for the dynamic driving task.
-
7.8 Here we are focused on approved vehicles with driving automation features that have not been specified as self-driving by the authorisation authority. It is important that these features are not oversold as self-driving.
THE CURRENT LAW
-
7.9 During informal discussions, the Society of Motor Manufacturers and Traders (SMMT) were concerned about creating additional criminal offences when existing laws are adequate. We have therefore reviewed existing law on misleading marketing and product safety, to see if they provide the required protection. The results are set out in Appendix 3.
-
7.10 We focused on the Consumer Protection from Unfair Trading Regulations 2008 (CPRs) and the General Product Safety Regulations 2005 (GPSR). Whilst these laws partly cover the present mischief, their application to self-driving technologies is cumbersome and uncertain, with the risk of gaps in protection. We therefore think there is a need for additional protection where terminology has the potential to be particularly misleading (such as misuse of the term “self-driving”).
-
7.11 Unlike the CPRs, the offences we recommend below would not be limited to practices which would cause a reasonably circumspect consumer to make a “transactional decision” (such as buying a car). Instead, the offences are aimed at practices likely to confuse any driver, including those who use vehicles owned by others. We have, however, been influenced by the CPRs’ two-limb approach. Under the CPRs, some practices are automatically unfair, because, for example, they display an unauthorised trust mark. 296Others are unfair because their overall presentation is likely to deceive its audience. 297This approach is reflected in the two distinct offences that we recommend.
-
7.12 Our recommendations are also influenced by the protection offered to certain specific terms under existing law. This includes the term “royal” and geographical indications for products with a specific origin, such as Scotch Whisky. We discuss such protections in Appendix 3.
EXPERIENCE IN OTHER JURISDICTIONS
-
7.13 Misleading marketing of AVs is a live issue that has arisen in other jurisdictions. Regulators around the world are adopting a range of approaches to regulate AV marketing.
-
7.14 California has adopted targeted regulation directed specifically at misleading advertisements of AVs:
-
(1) “No manufacturer or its agents shall represent in any advertising for the sale or lease of a vehicle that a vehicle is autonomous” unless it meets all of the [authorisation] requirements.298
-
(2) If “the use of terms to describe the performance of a vehicle .. will likely induce a reasonably prudent person to believe a vehicle is autonomous”, this constitutes an advertisement that a vehicle is autonomous.299
-
7.15 In China, a fatal accident led to calls for standardised terms in the marketing of vehicles with driver assist functions. 300In Germany, the issue has been approached as a matter of unfair competition. 301In the US, consumer rights groups have also urged the Federal Trade Commission to investigate whether the name “autopilot” is misleading.302
TWO NEW CRIMINAL OFFENCES
-
(1) uses certain terms (“self-drive”, “self-driving”, “drive itself”, “driverless” and “automated vehicle”) in connection with driving automation technology that is:
“Commercial practice”
-
7.18 Burges Salmon highlighted that the offences should be confined to commercial statements used in marketing or made to sell a product. They should not, for example, extend to academic or political discussion. We recommend confining both offences to “commercial practices”. “Commercial practice” is a commonly used concept in consumer law. The CPRs define a commercial practice as:
any act, omission, course of conduct, representation or commercial communication (including advertising and marketing) by a trader, which is directly connected with the promotion, sale or supply of a product to or from consumers, whether occurring before, during or after a commercial transaction (if any) in relation to a product.303
-
7.19 This is a broad concept. It covers not only advertising but also instruction manuals and in-vehicle instruction, as well as social media posts and press releases issued after the sale. However, it is not all encompassing. It is confined to conduct of a commercial nature and would not apply to academic or policy discussions of the issue.
-
7.20 We recommend adopting a definition similar to that used in the CPRs, with one change. Practices should not be confined to products supplied “to or from consumers”. It should also apply to driving automation in commercial vehicles, such as vans.
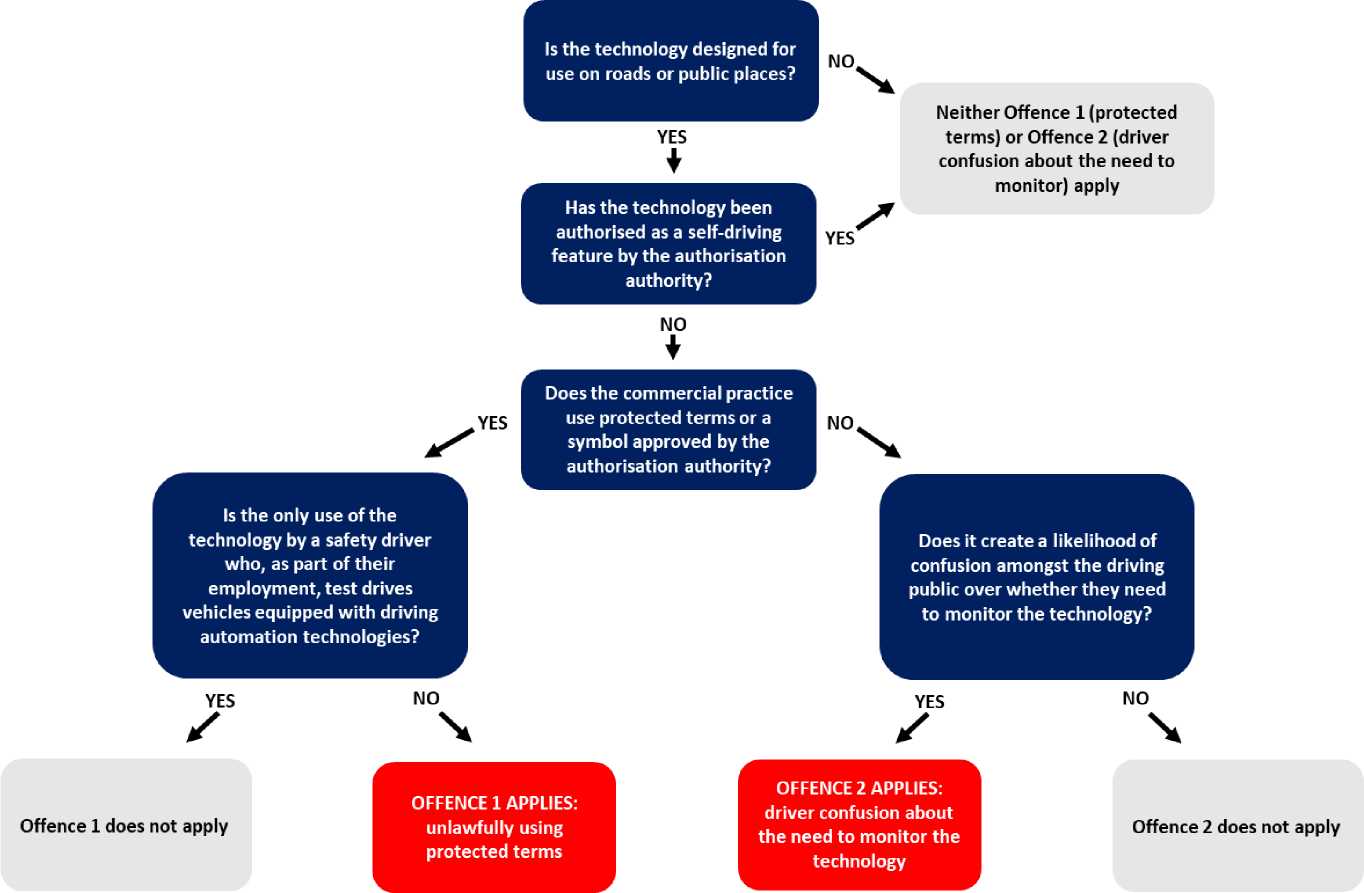 |
|
Figure 7.1 Overview of the two new marketing offences. |
Offence 1: Describing unauthorised driving automation as “self-driving”
-
7.21 Under the SAE Taxonomy, the phrase “driving automation” applies to systems that can only perform part of the dynamic driving task, as well as those which can do all of it.304 Driving automation includes, among other things, driver support systems, such as adaptive cruise control. We consider it necessary to ensure that a driver support system cannot be marketed as “self-driving” or able to “drive itself” when such technologies are not specified as self-driving features under our AV authorisation scheme.305
-
7.22 In our view, it should be a criminal offence to use these terms in connection with unauthorised driving automation designed for use on the road or in public places. The offence should be committed even if the claim of “self-driving” is accompanied by material that stresses the need for a driver to remain fully attentive. Drivers should not be forced to distinguish between vehicles authorised with self-driving features (which do not need to be monitored) and technology described as “self-driving”, when it is not self-driving. This would amount to a confusing mixture of messages. That confusion could be dangerous, not only for the drivers themselves, but for other road users.
-
7.23 We recommend a limited exception where the system is only used by safety drivers during trials.306
What terms should be protected?
-
7.24 The appropriate terminology to describe automated driving is far from settled. 307Our aim with these offences is not to prescribe what language is best. We confine our recommendations to prohibiting the language most likely to mislead the public into thinking they do not need to carry out or pay attention to the driving task. The terms we have identified are: “self-drive”, “self-driving”, “drive itself”, “driverless” and “automated vehicle”.
-
7.25 We considered whether the term “automated” should also be protected when applied to a system rather than a vehicle. On balance, we think this would be too wide. Variations of the words “automated”, “automation” and “automatic” are widely applied to automobiles, the automotive industry and a wide variety of parts, ranging from gearboxes to windscreen wipers to brakes. 308However, the two word phrase “automated vehicle” has a narrower application and is gaining a distinct meaning as driving technology develops. The term was adopted by the Automated and Electric Vehicles Act 2018 and we recommend its use in a new Automated Vehicles Act. We have therefore concluded that “automated vehicle” should be given specific protection.
-
7.26 In Chapter 2, we explain that the language of automated driving is still developing. Industry and policymakers are at the beginning of a long road in communicating automated driving’s many nuances to the public. Considerable work is taking place in this area. 309At this stage, we are reluctant to be overly prescriptive about other terms that should not be used. Non-protected terms which nevertheless create a likelihood of confusion would be caught by Offence 2, described below. Such terms might include “autonomous” or “autopilot”.
-
7.27 Some stakeholders suggested that consumer testing could inform and assess the actual likelihood of confusion against proposed controlled terms. We think further research could be beneficial to determine whether any additional terms should be protected. We therefore recommend that the Secretary of State for Transport should have the power to add any additional terms likely to cause confusion to drivers in Great Britain. In the light of experience, the Secretary of State may decide to protect terms such as “automated driving” or “autonomous” as well as those related to self-driving.
Protecting a possible kitemark
-
7.28 In their response to Consultation Paper 1, Five AI suggested that the use of a kitemark or equivalent symbol might be beneficial for consumers, as indicating that a vehicle is self-driving. Matthew Avery of Thatcham Research has also mentioned the possibility of a standardised symbol to indicate self-driving.310
-
7.29 As the industry develops, there may be merit in developing a recognisable kitemark or symbol to indicate self-driving, particularly if standardised internationally. If such a kitemark were to be approved by the authorisation authority, we think that its use should also be protected.
What commercial practices would be covered?
-
7.30 The offence applies to commercial practices which use terms in connection with driving automation designed for use on roads or public places. It covers technology integrated into motor vehicles, together with additional parts, features or software. It would cover an “after-market kit”, which purports to add “self-driving” features to conventional vehicles.311
-
7.31 Consultees pointed out that rental companies often advertise “self-drive” vans and cars. This means that the customer drives - in contrast to a home removals service, which includes a driver. Here the word “self-drive” in its accepted usage of the expression does not suggest that the vehicle drives itself (and is not being used in connection with a driving automation technology), so it would not be caught by the offence.
-
7.32 In addition, the offence is restricted to technologies which are designed for use on roads and other public places. It would not cover technology designed for off-road environments, such as racing tracks, farms, mines or warehouses. It would continue to be legal to advertise a self-driving tractor or lawnmower, provided it was not intended for use on the road.
What authorisation is required?
-
7.33 Under our recommendations, vehicles will be authorised as having specified selfdriving features. The offence would apply if any of the prescribed terms, including “self-driving”, were applied to an ADS feature which had not been specified as selfdriving by the authorisation authority. Even if a vehicle had been authorised, only those features which are specified as self-driving for that particular vehicle could be described as such.
Trials and safety drivers
-
7.34 It is not our intention to prevent developers from engaging in commercial practices concerned with “self-driving” trials. Developers should continue to be allowed to advertise to the public to take part in a “self-driving” trial, alongside a safety driver. In this case, the public would merely be passengers and therefore not at risk of being misled into failing to pay attention to the driving task.
-
7.35 Industry best practice provides that safety drivers should receive specialist training and comply with their employer’s safety procedures and policies. 312As safety drivers undergo specialist training, they are not at risk of being misled into failing to pay attention by claims that features are “self-driving”.
-
7.36 We therefore recommend that the offence should not apply if the only use of the driving automation technology is by a safety driver. We define “safety drivers” as persons who, as part of their employment, test drive vehicles equipped with driving automation technologies.
Recommendation 34.
-
(1) the terms “self-drive”, “self-driving”, “drive itself”, “driverless” and “automated vehicle”;
-
(2) any other terms prescribed by the Secretary of State for Transport by regulations; or
-
(3) any symbol or kitemark approved by the authorisation authority to identify authorised ADS features;
unless the driving automation technology is specified as a self-driving feature by the authorisation authority under the authorisation scheme recommended in this report.
The offence should not be committed if the only use of the driving automation technology is by a person who, as part of their employment, test drives vehicles equipped with driving automation technologies (a “safety driver”).
Offence 2: Misleading drivers that a vehicle does not need to be monitored
-
7.38 In our view, it should also be a criminal offence to engage in a commercial practice which is likely to confuse drivers into thinking that an unauthorised driving automation technology does not need to be monitored when on a public road or place.
-
7.39 In some ways, Offence 2 is wider than Offence 1. It is not limited to any particular words (such as “self-driving” or “driverless”). As with Regulation 5(2) of the CPRs, it takes into account the overall presentation, rather than focusing on a specific term. Nor does the commercial practice have to be primarily concerned with driving automation features. It could apply to a commercial practice concerned with another product. An example might be an advertisement for car insurance which showed someone failing to monitor a vehicle, when the make and model in question was not authorised as self-driving.
-
7.40 Instead, the offence focuses on the effect of the commercial practice: is it likely to create confusion among drivers over whether the driving automation technology needs to be monitored when used on a road or public place? The prosecution would need to show that the driving public were, in all the circumstances, likely to be confused into thinking that the technology did not need to be monitored.
A prudent person test?
-
7.41 Consumer legislation often refers to a hypothetical person who is “prudent”, or “reasonably observant and circumspect”. Many people are not reasonably circumspect - but consumer protection legislation aims to help people look after their own interests.
-
7.42 The present context, however, is not consumer protection but general public safety. A hypothetical prudent driver would never drive without looking at the road. They would always read the manual and understand the disclaimers. However, many human drivers do not read manuals, and many discount legal disclaimers which are given less prominence than the main claim. In this case, the “mischief” is experienced by the road user who may be killed or injured by a confused driver. Road users need protection against confused drivers who are not observant or prudent, as well as those who are.
-
7.43 We have therefore borrowed from the Scotch Whisky Regulations 2009 to refer to the “likelihood of confusion on the part of the public”.313 This looks at the likelihood of actual confusion, rather than at a hypothetical prudent person. The courts are best placed to make such an assessment.
-
7.44 SMMT were concerned about removing the prudent person test. They thought an unintended consequence could be to legitimise ignorant and irresponsible behaviour, such as moving out of the driving seat while a driver assistance feature was engaged. In response to SMMT’s concerns, it is important to stress that the marketing offences would not remove the liability of drivers in any way. Drivers of unauthorised vehicles would still be required to pay due care and attention. They would commit criminal offences (sometimes very serious offences) if they fail to do so. This would remain the case irrespective of whether or not a manufacturer has been found guilty of these marketing offences.
Recommendation 35.
-
(1) engage in a commercial practice;
-
(2) which creates a likelihood of confusion among the public (or a part of the public) licensed to drive;
-
(3) over whether a driving automation technology needs to be monitored when used on a road or public place;
-
(4) when that driving automation technology has not been specified as a selfdriving feature by the authorisation authority.
Online marketing across jurisdictions
-
7.46 We have considered the issue of driving automation technologies advertised online across multiple jurisdictions, for example, on YouTube or other social media platforms such as Twitter.
-
7.47 There may be situations where a driving automation technology is approved by a foreign regulator as “self-driving” in their territory. However, it may not be authorised as self-driving in GB. The global nature of the automotive industry and the internet mean that people in GB may see online material even if not addressed to them. In these circumstances, we think that those involved with marketing driving automation should do all they can to restrict access to the material or to make it abundantly clear that material relates to some jurisdictions and not others.
-
7.48 We recommend that both offences should be subject to a limited due diligence defence.314 This would only be available if the commercial practice in question was engaged in from outside GB, for example, if it was a commercial communication directed at consumers in Germany. A business would have a defence if the commercial practice that gave rise to the offence originated from outside GB and it had taken all reasonable precautions and exercised due diligence to prevent GB drivers from being misled. Whether the defence was made out would be a matter for the courts to decide.
Recommendation 36.
-
(1) the commercial practice giving rise to the offence was engaged in from outside Great Britain; and
-
(2) the person engaging in the commercial practice took all reasonable precautions and exercised due diligence to prevent drivers in Great Britain from being misled.
Enforcement
How should the new provisions be enforced?
-
7.50 Enforcement under the CPRs does not only use criminal prosecutions. Under Part 8 of the Enterprise Act 2002, enforcement agencies may apply to the civil courts for civil enforcement orders. Here, the courts apply a civil burden of proof (on the balance of probabilities). If the court finds that the trader is engaged, or is likely to engage, in conduct which infringes the law, it may order the trader not to engage in such conduct. 315Enforcement orders are similar to injunctions or interdicts: breach is a contempt of court, and the trader can be fined or imprisoned.
-
7.51 The Enterprise Act also provides opportunities for consultation and voluntary compliance before any formal orders are made. It is common for the court to accept undertakings rather than make a formal order. 316Breach of an undertaking can also put the trader in contempt of court.
-
7.52 Civil enforcement orders and voluntary undertakings can be more effective than prosecution. We think they should also be available in this context. During informal discussions, stakeholders agreed that the new enforcer should have access to similar powers. The decision whether to seek criminal prosecution or pursue civil enforcement would be a matter of discretion for the enforcement agency. The agency would be required to publish guidance on how it exercises its statutory powers.
-
7.53 We have considered whether any new enforcer should simply be included among those who can take action under Part 8 of the Enterprise Act. A possible problem with this solution, however, is that under Part 8, enforcement action can only be brought if there has been an act or omission which “harms the collective interests of consumers”. 317This may not apply to an AV regulator bringing proceedings on the basis of protecting the safety of all road users, not simply consumers.
-
7.54 An alternative would be to replicate the essential Part 8 powers in new legislation without requiring the consumer harm test. Simplified Part 8 powers could include the power to:
-
(1) obtain a civil enforcement order 318(including an interim order);319
-
(2) accept undertakings;320 and
-
(3) issue further proceedings (for example, for failing to comply with an order).321
-
(1) investigate potential breaches of the BPRs;322
-
(2) apply for an injunction to secure compliance with any of the regulations;323
-
(3) accept undertakings;324 and
-
(4) prosecute businesses for engaging in misleading advertising.325
-
7.56 We have concluded the new Act should borrow from the experience of the BPRs, despite the fact they have been used infrequently and limited case law exists on the operation of the regime. The new Act should give the enforcement agency powers to accept voluntary undertakings and to apply to a court for civil enforcement orders. These powers would be similar to those used in the Enterprise Act 2002 but would not require harm to the collective interests of consumers.
Recommendation 37.
Who should be responsible for civil enforcement?
-
7.58 We recommend that the new Act should require the Secretary of State for Transport to nominate an enforcement agency responsible for pursuing civil enforcement and preventing the offending conduct. In practice, we think the Secretary of State would nominate an existing agency to do this, such as the Driver and Vehicle Standards Agency (DVSA). The advantage of this approach is that civil enforcement powers would be exercised by an organisation that understands the nature of self-driving. It would be aware of the dangers of failing to monitor the driving environment and of how easily the public can become confused.
-
7.59 We considered whether the civil enforcement powers should be exercised by existing consumer protection agencies, such as Trading Standards and the Competition and Markets Authority. However, the issue is not simply one of consumer protection. Some drivers with the potential to be misled may not be consumers: they may not have made a purchase or may be acting in a professional rather than consumer capacity. However, they may still pose a danger to other road users.
Recommendation 38.
Chapter 8: The role of a user-in-charge
-
8.1 Many automated vehicles (AVs) will require a human in the driving seat to take over the controls in some circumstances. We refer to this person as the “user-in-charge”.
-
8.2 In Chapter 5 we explained that when a vehicle is authorised as self-driving, the authorisation authority will look separately at each automated driving system (ADS) “feature”.326 During authorisation, each feature will be authorised for use either with or without a user-in-charge. Here we focus on the role of the human in the driving seat while an ADS feature authorised for use with a user-in-charge is engaged.
-
8.3 In Consultation Paper 1 we explained that a user-in-charge must be fit and qualified to drive, as they may be called on to take over driving following a transition demand. While the ADS is engaged, the user-in-charge would not be responsible for the dynamic driving task. However, they would retain certain other responsibilities normally associated with drivers (such as carrying insurance). In response to Consultation Paper 1, the majority of consultees (79%) supported the idea of a user-in-charge.327 However, many consultees requested more detail on how the concept would work in practice.
-
8.4 In Consultation Paper 3, we developed the concept, setting out provisional proposals about the definition and responsibilities of a user-in-charge. Overall, our proposals received broad support. We received detailed feedback from consultees which has helped us to refine our thinking.
-
8.5 Here we offer our final recommendations on the user-in-charge. We start with the definition. In broad practical terms, the user-in-charge is the person in the driving seat while an ADS feature is engaged. However, our definition allows for the fact that driving seats might change as vehicles develop.
-
8.6 We then outline the responsibilities of a user-in-charge. Since a user-in-charge may be required to take over manual driving to complete the journey, they must be qualified and fit to drive. We recommend new offences to prevent AVs from being used by unqualified or unfit users-in-charge or without a user-in-charge. We also consider whether provisionally licensed drivers should be able to act as users-in-charge.
-
8.7 While the ADS is engaged, users-in-charge would have immunity from any dynamic driving offences or civil penalties. However, the user-in-charge would retain responsibility for non-dynamic driving responsibilities, such as insurance and maintenance.
-
8.8 The final section focusses on the handover between ADS and human. Once a person has completed the takeover from the ADS, they become a driver and their immunity from dynamic driving offences ceases. We consider the need for a specific defence where problems are initiated by the ADS before the human takes over. We also discuss the legal effect of failing to respond to a transition demand.
THE DEFINITION OF A USER-IN-CHARGE
-
8.9 The concept of a user-in-charge applies where a vehicle is authorised as having a self-driving ADS feature for use with a user-in-charge. Under our recommendations, the user-in-charge would be defined as an individual who is in the vehicle and in position to operate the driving controls while such an ADS feature is engaged. We look at each element of the definition in turn.
An individual
In position to operate the vehicle controls
-
8.11 Given current vehicle design, a user-in-charge is expected to remain in the driving seat throughout the journey. This enables the user-in-charge to take over driving, either in response to a transition demand or through a voluntary offer and confirm procedure.
-
8.12 We recognise the possibility that in the medium to long term, as AVs become more advanced and vehicle design changes, not every vehicle that requires a user-in-charge will have a “driving seat” in the conventional sense. Some of the controls may look different, such as a joystick replacing the steering wheel. However, the requirement that the user-in-charge be in position to operate the vehicle controls is sufficiently flexible to accommodate these developments.
In the vehicle
Not remote operation
-
8.13 As we explained in Consultation Paper 3, we do not think that a user-in-charge should be located remotely. 328Instead, running a remote operations centre should be an organisational responsibility. In Chapter 9 we recommend that remote centres are run by licensed NUIC operators who can ensure that staff provide remote assistance safely. An organisation, rather than an individual, is required to provide staff with reliable connectivity, training, appropriate equipment and workload.
Not “in direct sight”
-
8.14 In Consultation Paper 3, we suggested that the user-in-charge could be outside the vehicle provided they remained in direct sight of it. This was intended to retain some flexibility to cover possible future technological innovations. For example, a future feature might allow a vehicle to park itself with the possibility of issuing a transition demand to a user-in-charge nearby.
-
8.15 However, many consultees expressed doubts about the idea that a user-in-charge may be outside the vehicle but in sight of it. 329One criticism was the lack of clarity of the phrase “direct sight”. Burges Salmon pointed to the distinction between seeing the vehicle and seeing along its path:
A dynamic driving task demands not just line of sight from user to vehicle but also functional line of sight along the path of the vehicle. Line of sight principles as applied to buses and rail (including light rail), for example, are based on how far the driver can see ahead of the vehicle along its path.
-
8.16 More generally, several respondents thought that “direct sight” stretched the definition of a user-in-charge too widely. The Faculty of Advocates thought it “unconvincing” that a person would be able to regain control of the vehicle “to the extent necessary” merely by being in sight of it. KPMG similarly expressed concern that:
Despite clear multisensory transition demand signals, a user-in-charge that is outside of the vehicle may not be able to take over the controls of the vehicle in the same way that a user-in-charge in the driving seat can.
-
8.17 Other respondents said that the flexibility we were trying to achieve may not be needed. The Society of Motor Manufacturers and Traders (SMMT) could not envisage what sort of feature might be caught by the “direct sight” proviso. They pointed out that someone using current “remote control parking” features would not be a user-in-charge but a driver who is “fully responsible for the operation of the vehicle”.330 They commented that “the only known and foreseeable application of automated driving that does not require the user to be in the vehicle” is automated valet parking (AVP). However, it is not envisaged that AVP will require the user to be in direct sight of the vehicle.
-
8.18 We find consultees’ reasoning persuasive. We have come to the conclusion that only an individual inside a vehicle should be capable of being its user-in-charge. We accept that it would not be safe to expect someone to respond to a transition demand once they have left the vehicle. A person who has left the vehicle is likely to focus on the rest of their day, possibly turning their back on the vehicle and walking away. We do not think that a signal from a mobile phone would be a substitute for the full visual, audio and haptic warnings needed for a clear transition demand.
-
8.19 It is also true that, to the best of our knowledge, the “direct sight” extension is not needed for any feature currently being developed. For remote control parking, the user is a driver, with a duty to monitor the vehicle and the driving environment.
-
8.20 Future self-driving features might be developed where a nearby human fulfils a similar role to the user in charge. One might imagine, for example, a feature in which a person walks alongside a refuse truck travelling at low speed. Rather than monitoring
the vehicle, they may be focused on other activities, such as emptying bins. However, they may be required to respond to an alert if something goes wrong (in much the same way as a user-in-charge responds to a transition demand). Alternatively, an attendant might oversee self-driving vehicles within a car park, responding to alerts if problems arise. However, these possibilities all carry inherent risks. In these circumstances, we think that responsibility should rest with a licensed NUIC operator, who must ensure that the system is safe overall. The operator would need to provide suitable equipment to receive alerts from vehicles, train its staff and monitor their performance.
An ADS feature is engaged
-
(1) an individual takes control of the vehicle;
-
(2) (where the ADS issues a transition demand) the transition period ends; or
-
(3) (where the vehicle comes to a stop), an individual switches off the ADS or the engine; the ADS issues an alert to say that the trip is completed; or the user-in-charge leaves the vehicle voluntarily.
-
8.23 This legal definition does not necessarily require an ADS to be actively engaged in practice. An ADS might become non-operational, either because it has malfunctioned or because it has run out of charge. In these circumstances, the user-in-charge would not be responsible for any dynamic driving infractions where (for example) the vehicle ran out of control down a hill or came to a sudden and dangerous stop in lane.
-
8.24 Similarly, an ADS would continue to be engaged under this definition if the vehicle comes to a stop by the side of the road. The user-in-charge would not be responsible for the stop or a subsequent wait. However, the user-in-charge would need to check that the vehicle is legally parked before leaving it.
Recommendation 39.
For these purposes, a “relevant ADS feature” is an ADS feature in an authorised vehicle which the authorisation authority has specified as self-driving for use with a user-in-charge.
An ADS is engaged from when it is switched on until:
-
(1) an individual takes control of the vehicle;
-
(2) (where the ADS issues a transition demand), the transition period ends; or
-
(3) (where the vehicle comes to a stop), an individual switches off the ADS or the
engine; the ADS issues an alert to say that the trip is completed; or the userin-charge leaves the vehicle voluntarily.
QUALIFIED AND FIT TO DRIVE
-
8.26 As outlined in Consultation Paper 3,331 the main role of a user-in-charge is to be ready to take over driving. The user-in-charge would be allowed to take over driving at any stage, provided that they go through a procedure to prevent this happening by mistake (“offer and confirm”). They may also be prompted to take over driving by a transition demand. This means that the user-in-charge must be qualified and fit to drive.
Consultation Paper 3 proposals
-
8.27 In Consultation Paper 3 we provisionally proposed that legislation should create new criminal offences to underline this point. We thought it should be an offence to use an AV as an unfit or unqualified user-in-charge, or to cause or permit another person to do so.332
-
8.28 There are currently seven offences relating to the state of the driver of a motor vehicle, which cover:
-
(1) unlicensed driving;333
-
(2) disqualified driving;334
-
(3) driving a vehicle with false declaration as to any relevant disability or prospective disability;335
-
(4) driving with uncorrected defective eyesight;336
-
(5) driving under the influence of drink or drugs;337
-
(6) driving with alcohol concentration above the prescribed limit; 338and
-
(7) driving with concentration of a controlled drug above the specified limit.339
-
8.29 We thought that it should be an offence to act as a user-in-charge in contravention of any of these requirements. Legislative reform may not be strictly necessary in all cases: it is already an offence to be “in charge” of a vehicle while unfit to drive through drink or drugs or over the prescribed alcohol or drug limits. 340However, we saw value in a consolidated, comprehensive list of duties which is understandable by members of the public.
Support for requirements to be qualified and fit to drive
-
8.30 There was a very high level of support for this requirement.341 Transport for London, for example, thought it would have “a positive impact on safety”. The Bar Council said that the new offences should replicate the structure of “comparable existing offences”, since any “substantial divergence... would risk confusion”. For example, they thought unfitness through drink or drugs should be separate from being over the prescribed limit.
-
8.31 We recommend that legislation should create offences of being unqualified or unfit to drive that mirror the criminal liability that already applies to drivers. This will ensure that users-in-charge (as potential drivers, following a transition demand) understand their liability and that no confusion arises.
-
8.32 The effect of the recommendation is that if an ADS requiring a user-in-charge is engaged, the individual in the driving seat commits a criminal offence if they are unqualified or unfit to drive. The message would be clear: sitting in the driving seat with the ADS engaged while over the alcohol limit is a crime.
Recommendation 40.
-
(1) without a licence authorising them to drive a motor vehicle of that class;
-
(2) while disqualified from obtaining a licence;
-
(3) with a false declaration as to any relevant disability or prospective disability;
-
(4) with uncorrected defective eyesight;
-
(5) when under the influence of drink or drugs;
-
(6) with alcohol concentration above the prescribed limit; and
-
(7) with concentration of a controlled drug above the specified limit.
Causing or permitting an unfit or unqualified person to be a user-in-charge
-
8.34 In Consultation Paper 3, we proposed that it should also be an offence to cause or permit an unfit or unqualified person to act as a user-in-charge. This would apply, for example, to a person who encouraged their inebriated friend into the driving seat, or to an employer who suspected a worker had lost their licence, but still allowed them to use an AV.
-
8.35 We explained that “cause or permit” offences are common in road traffic law, particularly for roadworthiness offences. For example, a person commits an offence under section 40A of the Road Traffic Act 1988 if the person “uses, or causes or permits another to use” a vehicle in dangerous condition.
-
8.36 Under the current law, it is an offence to cause or permit another person to drive without a licence. 342However, none of the other offences relating to the state of the driver have a cause or permit equivalent. For example, it is not currently an offence to cause or permit another to drive under the influence of drink or drugs, or with uncorrected eyesight. Rather than re-enact this inconsistency into new legislation, we provisionally proposed that it should be a criminal offence to cause or permit any unqualified or unfit persons to be users-in-charge. Our proposal was therefore to create a “cause or permit” equivalent to every offence listed above.
-
8.37 In response to Consultation Paper 3, most consultees supported the provisional proposal, but some worried that it would extend liability too far. Consultees did not object to criminal liability for someone who “caused” the offence, by (for example) helping a drunk friend into the driving seat and turning on the ADS. However, two law firms, Pinsent Masons and DAC Beachcroft, expressed concerned that a passenger might “permit” the offence simply by accepting a lift from someone who appeared drunk.343
The current law
-
8.38 In view of the concerns expressed, we have looked again at the current law in this area. We think that our original analysis overstated the meaning of “permitting”. A person can only be liable for permitting another person to use a motor vehicle if they are in a position to forbid that person from using the vehicle.344 The only people who can “permit” the offence are an employer, the owner of the vehicle, or another person who has control over it on the owner’s behalf.345 The offence of “permitting” an unfit user-in-charge would not normally apply to a passenger who simply accepted a lift from a drunk user-in-charge, unless the passenger owned the vehicle.
-
8.39 Even without “causing or permitting” offences, people may be held liable for being accessories to crimes. In England and Wales, it is an offence to aid, abet, counsel or procure any summary offence under section 44 of the Magistrates’ Courts Act 1980.346 In Scotland, similar statutory provisions apply.347 For road traffic offences, these provisions have been interpreted to produce similar outcomes to “causing or permitting” offences. For example, in Pope v Minton, 348the owner of a car had aided and abetted his disqualified friend to drive by leaving him his car to use. In the Scots case of Valentine v Mackie,349 the accused was found guilty of aiding and abetting a provisionally licensed driver to drive the accused’s vehicle while over the permitted alcohol limit. Given these cases, our proposal would not necessarily represent an extension of the current law.
-
8.40 We continue to think that an offence of causing or permitting an unqualified or unfit person to act as a user-in-charge would bring welcome clarity to the law. Although similar outcomes may be achieved under the law of aiding and abetting, “cause or permit” offences make the prohibition more understandable. We think that given the passive nature of being a user-in-charge, it is important to give a clear message that, for example, helping a drunk user-in-charge into a driving seat and turning on the ADS is a criminal offence.
Recommendation 41.
BEING CARRIED WITHOUT A USER-IN-CHARGE
-
8.42 In Consultation Paper 3, we proposed a new offence of allowing oneself to be carried in a vehicle without a user-in-charge. 350This offence targets situations where no one has access to the controls. For example, several (possibly drunk) passengers might sit in the passenger seats, because none of them wants to carry responsibility for the situation. We proposed that in such cases, all passengers should be guilty of being carried without a user-in-charge.
-
8.43 This proposal attracted majority support.351 Some respondents suggested that the problem could be avoided through appropriate design, by for example, requiring that the vehicle must “detect an alert human occupying the driver’s seat before commencing a journey”. 352However, the SMMT commented:
This proposal is important to prevent the misuse, or abuse, of the automated driving system (ADS), such as the user-in-charge vacating the driver’s seat after activating the ADS... Although technical solutions such as driver availability and monitoring systems should be able to prevent such abuses, they must not be seen as a substitute for legislation that clearly forbids being carried without a user-in-charge.
The mental element
-
8.45 In response to our first consultation, several respondents expressed concerns that such an offence could operate unfairly. Passengers might be subject to criminal penalties even if they had no knowledge that a user-in-charge was required by law, or that there was no user-in-charge in fact. They gave examples where the passenger is a child; 353a blind person unaware that there is no user-in-charge in the vehicle;354 or a person who is unconscious or asleep. 355Consultees suggested adding a mental element to the offence to exclude such cases.
-
8.46 In Consultation Paper 3, we sought views on whether the new proposed offence should only apply if the person:
-
8.47 Consultees overwhelmingly supported having a mental element to the offence. Some respondents favoured the suggested test, but we received a range of alternative suggestions. The most common was that the “ought to know” test should apply to both limbs. In other words, the prosecution should be required to show that the person charged knew or ought to have known:
-
8.48 Respondents pointed out that this would avoid difficulties in proving that a passenger knew that the vehicle did not have a user-in-charge.357 Kennedys Law noted that this was “more in line with most other driving offences”. The Senators of the College of Justice 358thought that such a test “would capture the scenario of drunk users without applying, for example, to a child or a blind person”.
-
8.49 We are convinced that this alternative test would make the offence somewhat more straightforward to prove, while still protecting those who had no reason to know a user-in-charge was required. We therefore recommend this mental element for the proposed offence.
Recommendation 42.
What if an AV requiring a user-in-charge is made to drive empty?
-
8.51 Another possible scenario is that a vehicle requiring a user-in-charge is made to drive with no-one in it at all. For example, a person might evade the driver availability recognition system, engage the ADS, shut the door and watch as the vehicle drives empty down the street.
-
8.52 Such behaviour would be extremely dangerous, and we think it should be criminal. It would be caught by the new offence we recommend in Chapter 9 of using a vehicle without a driver or user-in-charge unless it was authorised for such use.359
PROVISIONALLY LICENSED DRIVERS
-
8.53 In Consultation Paper 3, we sought views on whether provisionally licensed drivers should be able to act as users-in-charge if they are accompanied by an approved driving instructor in a vehicle with dual controls.
-
8.54 We made a comparison to motorway driving. In June 2018, the law changed to allow learner drivers to take driving lessons on motorways in England, Scotland and Wales in vehicles fitted with dual controls.360
-
8.55 Most consultees who responded to this question favoured allowing a learner driver to familiarise themselves with AV technology under supervision. The Association of Personal Injury Lawyers (APIL) said:
This is the only way for people to gain hands-on experience with automated technology and will teach them the limitations of different ADSs from the outset of their driving experience. This will further enhance safety in the future.
-
8.56 Aviva Insurance noted that the alternative was learner drivers “waiting until they pass their test” to find that “the next day they are behind the wheel of an AV experimenting with AV systems and capability”.
-
8.57 We agree that a learner driver should be permitted to engage an ADS, so as to be able to practise the skill of retaking control of the vehicle in a controlled environment.
We accordingly recommend that a provisional licence holder should be able to act as a user-in-charge, if accompanied by an approved driving instructor in a vehicle with dual controls. This can be achieved through existing regulation-making powers, without need for legislative reform.361
-
8.58 The first generation of user-in-charge vehicles are likely to operate only on motorwaytype roads. However, in the future, their operational design domain may extend to other types of roads, on which vehicles travel at lower speeds. It may be that in those conditions, safety will not require users-in-charge with provisional licences to be accompanied by an approved instructor in a dual control vehicle. Instead it might be sufficient to create parity with the supervision requirements for non-motorway driving. This allows learner drivers to be accompanied by a person over the age of 21, who is qualified to drive that type of vehicle, and has held the licence for at least three years.
-
8.59 Given the current stage of the technology’s development, it is too early to make a decision on this. However, the width of existing regulation-making powers for provisional licences means that should the UK Government wish to enact this policy in future, there is sufficient flexibility to do so through secondary legislation.
Recommendation 43.
THE IMMUNITY FROM DYNAMIC DRIVING OFFENCES
-
8.61 To be considered “self-driving”, a vehicle should be able to perform the entire dynamic driving task. This includes not only steering and braking, but also object and event detection and response. The vehicle needs to be able to monitor the driving environment and react to other road users and the conditions of the road.
-
8.62 Therefore, in Consultation Paper 3 we provisionally proposed that a user-in-charge should have an immunity from any criminal offence or civil penalty which arise out of dynamic driving. This immunity is an essential plank of our scheme. If users are told that they do not need to pay attention to the dynamic driving task, they cannot be prosecuted for failures that arise out of dynamic driving. As we note below, the French legislation gives a similar immunity.
-
8.63 Despite some concerns, most consultees agreed with the proposal. DAC Beachcroft summarised the arguments for the immunity:
First and foremost, it would be wrong for the user-in-charge to be held accountable where s/he is not in control of the vehicle. ... It would also undermine one of the rationales for automated driving, which is to enable the user-in-charge to engage in other activities during road travel, as users-in-charge would feel obligated to monitor the dynamic driving task when the ADS is engaged for fear of incurring a civil or criminal liability. It follows that it would also risk undermining consumer appetite for ADS, as well as undermining public trust and confidence.
The French approach
-
8.64 On 14 April 2021, the French Ministry of Ecological Transition released two orders creating regulations for automated vehicles. The French legislation refers to the person behind the wheel when an ADS is engaged as a “driver” rather than a “user-in-charge”. As discussed in Chapter 3, the law requires the driver to respond to some events, such as the presence of emergency vehicles.
-
8.65 However, as far as the immunity is concerned, the French approach is similar. Under the new order, where the ADS exercises dynamic control of the vehicle, the driver is no longer criminally responsible for the offences resulting from a vehicle manoeuvre, provided the driver engaged the ADS in compliance with its terms of use. Instead, the vehicle manufacturer or its agent becomes liable for the breach.
-
8.66 The driver immunity applies to “offences resulting from a manoeuvre of a vehicle whose driving functions are delegated to an automated driving system”, where that system exercises “dynamic control of the vehicle”. 362Similarly, the vehicle manufacturer is liable financially for any fine imposed in respect of “a manoeuvre carried out by the automated driving system exercising dynamic control of the vehicle in accordance with its terms of use”.363
What is dynamic driving?
-
8.67 It is easy to explain the nature of dynamic driving in general terms. In Chapter 2 we draw on the SAE Taxonomy’s definition of the “dynamic driving task”. Essentially, an offence arises out of dynamic driving if it involves a breach of a duty to monitor the driving environment and respond appropriately by using the vehicle controls to steer, accelerate, brake, turn on lights or indicate. Dangerous driving, careless driving and exceeding the speed limit are all dynamic driving offences.
-
8.68 In Consultation Paper 3 we illustrated the distinction between dynamic and nondynamic offences with an example. 364Following an accident, drivers have legal obligations to stop, to exchange details and to report to the police. We saw the obligation to stop as part of dynamic driving: it requires monitoring the environment and responding to an event by steering and braking. However, the obligations to exchange details and to report to the police are non-dynamic. They would remain the responsibility of the user-in-charge.
-
8.69 Although the dynamic/non-dynamic distinction is easy to make in broad terms, it can be complex to apply to the full range of offences facing drivers. Driving offences have accreted over the last 90 years and there is little consistency in who is liable for them.365 The statutory language used does not assist in making the distinction. Some non-dynamic offences (such as ensuring children wear seat belts) 366apply only to drivers. By contrast, some dynamic offences, such as not stopping on a motorway carriageway, apply to all those who “use a motorway”.367
-
8.70 Here we start by recommending an immunity from dynamic driving offences. Below, we look in more detail at the responsibilities which currently fall on drivers but which do not arise from dynamic driving. We then discuss how best to communicate the difference between “dynamic” and “non-dynamic” offences and to enshrine it in legislation.
THE USER-IN CHARGE’S IMMUNITY: RECOMMENDATION
-
8.71 We continue to believe that a user-in-charge should be granted an immunity for dynamic driving offences that arise out of the dynamic driving task. As we discussed earlier, an individual in the driving seat acquires user-in-charge status (and therefore has the immunity) while a relevant ADS feature is engaged. The ADS is engaged when it is switched on. It ceases to be engaged when an individual takes control of the vehicle or the transition period ends. It also ceases to be engaged if the vehicle comes to a stop and the user-in-charge switches off the feature or the engine, or leaves the vehicle.
“Engaged” or “correctly engaged”?
-
8.72 Under French law, a driver is only granted immunity if they have engaged the ADS in compliance with its terms of use. We have considered whether a similar limitation should apply under our scheme.
-
8.73 In response to Consultation Paper 3, several consultees raised the issue of wrongful activation of the ADS. For example, DAC Beachcroft and KPMG thought there should be an exception to the immunity if a user-in-charge wrongly engaged the ADS in circumstances where it is not capable of self-driving. Shoosmiths referred to section 3(2) of the Automated and Electric Vehicles Act 2018. This provides an exception to the insurer’s liability to a person for accidents “wholly due to the person’s negligence due in allowing the vehicle to begin driving itself when it was not appropriate to do so”.
-
8.74 The problem, however, is that manufacturers might produce long and complex lists of when the ADS should not be engaged, requiring the user-in-charge to interpret difficult terms. For example, a sub-clause might state that the ADS should not be used in heavy rain, leaving the user to decide whether rain was moderate or heavy. The policy might even provide manufacturers with an incentive to produce ever expanding terms of use, to deflect as much responsibility as possible if things go wrong.
-
8.75 The alternative is to ensure safety by design, so that an ADS could not operate outside its operational design domain (ODD). If the rain is too heavy for the ADS to function safely, it should not be possible to switch it on. This is the approach taken by the UNECE’s Global Forum for Road Traffic Safety (WP1). Its 2018 resolution states that automated driving systems should “only operate within their ODD”.368
-
8.76 We do not think that it is realistic to expect users to check detailed lists of terms of use before engaging an ADS. Instead, an ADS should not operate if it is outside its ODD. We see this “safe by design” principle as essential to the successful introduction of AVs. Users will expect automated driving to be easier than conventional driving: they are unlikely to absorb and act on complex information about when an ADS should or should not be engaged. Relying on unrealistic expectations about user behaviour could blur lines of responsibility and could lead to public rejection of the technology.
-
8.77 We have been persuaded, however, that the immunity should not apply if the user-in charge deliberately interferes with the functioning of the ADS. We do not yet know how systems could be overridden, though one can imagine ways in which users might interfere with “safe by design” features. They may, for example, place a weight on the driving seat to make the AV think the user-in-charge is still sitting there; or blow a hairdryer on a temperature sensor so that an ADS designed not to function in freezing weather does not know that the temperature had dropped. Alternatively, they may install rogue software, designed to modify the way the vehicle functions.
-
8.78 We therefore recommend that the immunity should not apply if the user-in-charge has taken steps to override or alter the system to engage the ADS when it is not designed to function. Similarly, the immunity should cease if the user-in-charge deliberately causes the ADS to malfunction.
Recommendation 44.
The immunity should not apply if the user-in-charge has taken steps to override or alter the system so as to engage the ADS when it is not designed to function.
The immunity should cease if the user-in-charge deliberately interferes with the functioning of the ADS.
THE LIABILITY OF A USER-IN-CHARGE FOR NON-DYNAMIC DRIVING OFFENCES
-
(1) insurance;
-
(2) maintaining the vehicle in a roadworthy condition (including installing safety critical software updates);
-
(3) parking;
-
(4) duties following accidents to provide information and report accidents to the police; and
-
(5) ensuring child passengers wear seatbelts.
Insurance
Roadworthiness
-
8.83 In Consultation Paper 3, we discussed the current offences of using a vehicle in an unroadworthy condition. We noted that as vehicles become more sophisticated, conventional drivers increasingly rely on alerts from the vehicle to know if it is roadworthy. This trend is likely to continue, particularly for AVs. We do not yet know which faults an AV will be able to detect and which will need to be detected by the user-in-charge. We provisionally concluded that in the early stages of automation, roadworthiness offences should continue to apply to users-in-charge, but that legislation should include a regulation-making power to adapt these offences.
-
8.84 The issue provoked considerable discussion about how AVs will be maintained, particularly if safety-critical software updates are required. Many respondents argued for technical solutions, either to alert the user-in-charge to a safety critical update, or to prevent the vehicle from being used without one.
-
8.85 We would hope that technical solutions can be found both to alert owners to roadworthiness issues in AVs and to ensure that safety-critical updates are installed. However, pending these solutions, it is important that the law does not leave a gap in responsibility. We conclude that, for now, the existing roadworthiness offences should continue to apply to a user-in-charge. The legislation should include sufficient flexibility for this to change as the technology develops. We therefore recommend a regulationmaking power to adapt the roadworthiness offences for AVs. This would include a power to reallocate some roadworthiness responsibilities to the Authorised SelfDriving Entity (ASDE) where this appears appropriate.
Parking
-
8.86 In response to Consultation Paper 3, most consultees agreed that the user-in-charge should be responsible for parking contraventions. However, some pointed to the complexities of parking law and said that the issue required further thought.370
-
8.87 The difficulty is how to distinguish between instances where the vehicle simply stops in an inappropriate place and those in which it is “parked”. If a vehicle simply stops without issuing a transition demand, that is part of the dynamic driving task. However, if the user-in-charge leaves a vehicle in an inappropriate place, we think that should be the responsibility of the user-in-charge.
-
8.88 Statutory language provides little help in distinguishing between these cases. Statutes commonly refer to “parking”, “waiting” or (in the case of the Motorway Regulations) “remaining at rest”.371 The courts have held that these three terms are synonymous. They all require more than simply waiting in a traffic jam.372 However, the terms do not (of themselves) require the wait to be of any particular length of time. 373Nor do they require that the driver leaves the vehicle.374
-
8.89 In Consultation Paper 3 we explained that a user-in-charge’s immunity would end on take-over or following a transition demand. We think that it should also end when the user-in-charge receives an alert that the trip is completed, switches off the ADS or engine, or leaves the vehicle. In any of these circumstances, the user-in-charge should be responsible for checking that the vehicle is not in a prohibited place. This means that the user-in-charge would have the same responsibilities as a driver for any waiting or parking offences, irrespective of who made the original stop. 375Our intention is to minimise change to the current system of parking enforcement.
Duties following accidents
-
8.90 Following an accident, drivers are required to stop, provide identifying details and (in some circumstances) report the accident to the police.376 Stopping is part of the dynamic driving task: once it detects a collision, the AV should either stop or issue a transition demand. However, we proposed that obligations to exchange details and report accidents should rest with the user-in-charge.
-
8.91 Most consultees agreed. A few pointed out that it would be unfair to penalise a userin-charge who was unaware of the collision.377 However, we think this point is already covered by the existing law. In Harding v Price, the court held that a defendant is not guilty of the offence if they lacked any knowledge of the accident, though it was for the defendant to prove their lack of knowledge on the balance of probabilities.378
-
8.92 In our view, a user-in-charge should be responsible for exchanging details and reporting the accident, subject to the defence in Harding v Price. That said, there is a broader case for reviewing the legal duties following an accident, as set out in section 170 of the Road Traffic Act 1988. The section is becoming increasingly outdated379 and the introduction of AVs has the potential to increase uncertainties associated with the section. 380We would urge the Government to review section 170 and update it for conventional vehicles as well as AVs.
Ensuring child passengers wear seatbelts
-
8.93 Under section 15 of the Road Traffic Act 1988, it an offence for a person to drive with a child passenger who is not wearing the appropriate seatbelt or restraint. Almost all respondents agreed that this liability should rest with the user-in-charge. Seat belt offences are not part of dynamic driving and should not be within the immunity.
Loading
-
8.94 Our consultation papers did not consider loading offences. However, the point was raised during consultation by Logistics UK.
-
8.95 Users have a duty to load their vehicle in a way that ensures the load does not endanger other road users or the general public. Under section 40A of the Road Traffic Act 1988, users must ensure that the weight, position or distribution of their load does not cause danger of injury to the person. Under section 41B, users must ensure their load complies with any requirements as to weight. Under section 42, users must comply with any other construction and use requirement.
-
8.96 The Road Vehicles (Construction and Use) Regulations 1986 contain many specific requirements relevant to loading (set out in regulations 75 to 96). In particular, loads should not exceed the permitted weight,381 width382 and length.383 Regulation 100(2) specifies that the load should be secured so that “neither danger nor nuisance is likely to be caused to any person or property”.
-
8.97 In addition, the Agreement concerning the International Carriage of Dangerous Goods by Road (ADR) regulates the carriage of dangerous goods. ADR duties fall on the “participants” in the carriage of dangerous goods, who shall “comply with the requirements of ADR in their respective fields”.384 The ADR provides a non-exhaustive list of participants, including the consignor, carrier, consignee, loader, packer, filler, tank operator, and unloader.385 The main duty on the driver is to “immediately notify the emergency services” of an immediate risk to public safety by informing the emergency services of the nature of the risk.386
-
8.98 We see all these offences as non-dynamic. Some responsibilities fall on other participants in the carriage of goods. Those responsibilities which currently fall on the driver would fall on the user-in-charge. This would include responsibilities to check the load before starting and to notify the emergency services of any hazards posed by the load.
Route planning
-
8.99 In Consultation Paper 1 we asked whether a user-in-charge should be responsible for offences relating to where a vehicle is driven.387 Responses to this question were mixed, with considerable uncertainty about whether the vehicle or the user-in-charge should be expected to take responsibility for the route.
-
8.100 The latest issue of the SAE Taxonomy views route-planning as non-dynamic. Paragraph 8.10 describes route-planning as “a user-determined” aspect of the broader driving task, “even when partially automated, such as through route navigation software”. However, the SAE notes that it may become automated in future.
-
8.101 For our purposes, it is helpful to distinguish between tactical and strategic routeplanning. In our view, dynamic driving includes tactical route-planning, such as deciding what lane to drive in. 388The ADS is therefore responsible for any offence or civil penalty relating to driving in a cycle lane or bus lane. The ADS should also ensure that the vehicle does not drive in a clearly illegal place, such as a verge or closed road, or the wrong way along a one-way street.
-
8.102 On the other hand, some routes involve tolls or charges. Others prohibit certain types of traffic: examples are driving prohibited vehicles on motorways or carrying dangerous goods in specified tunnels.389 We recommend that these remain the responsibility of the user-in-charge. On this basis, a user-in-charge would need to check whether the route (for example) entered the London Congestion Charge zone. The user-in-charge would be responsible for paying the charge and would be liable for the penalty if they did not.
Recommendation 45.
-
(1) Duties to carry insurance;
-
(2) Duties to maintain the vehicle in a roadworthy condition;
-
(3) Any parking offence which continues after the ADS feature is disengaged;
-
(4) Duties following accidents to provide information and report accidents;
-
(5) Duties to ensure that child passengers wear seatbelts;
-
(6) Duties relating to loading; and
-
(7) Strategic route planning, including duties to pay tolls and charges.
The new Act should include a regulation-making power to adapt the lists of dynamic and non-dynamic offences in the light of experience, including a power to allocate some or all roadworthiness responsibilities to the ASDE.
COMMUNICATING THE DYNAMIC/NON-DYNAMIC DISTINCTION TO USERS
-
8.104 One feature of the French law is how simply it deals with the dynamic/non-dynamic divide. Dynamic driving offences are referred to simply as “offences resulting from a vehicle manoeuvre” where driving functions are delegated to an ADS. While there is much to be said for the simplicity of the provision, it may not be sufficient to inform users about their responsibilities.
-
8.105 We wish to provide users with clear messages about what they are (and are not) responsible for while using an ADS feature requiring a user-in-charge. The most significant and serious driving offences are dangerous driving and careless or inconsiderate driving, together with the eight offences of causing death or serious injury by driving. 390All these offences are set out in sections 1 to 3A of the Road Traffic Act 1988. We wish to reassure users-in-charge that they cannot be found guilty of any of these offences for events that take place while the ADS is engaged (provided that they have not taken steps to override or alter the system or interfered with ADS functioning).
Committing dangerous driving offences through non-dynamic failures
-
8.106 The current offence of dangerous driving involves both a dynamic element and a nondynamic element. Section 2A(1) of the Road Traffic Act refers to dynamic driving (“the way he drives”) while section 2A(2) includes non-dynamic elements (“driving the vehicle in its current state”). In our view, to adjust traffic law for automated driving, it is necessary to disaggregate these two elements.
-
8.107 At present it is possible to be charged with dangerous driving and causing death by dangerous driving for failing to check roadworthiness or loading before the journey starts. In the case of R v Crossman, 391a driver set off despite the load on his trailer not being properly secured. When his load fell off and killed a pedestrian, he was found guilty of causing death by reckless driving (now death by dangerous driving).392
-
8.108 The effect of Crossman has been included within the definition of dangerous driving in the Road Traffic Act 1988.393 Section 2A(2) states
-
8.109 Section 2A(4) then confirms that in assessing the state of the vehicle, “regard may be had to anything attached to or carried on or in it and to the manner in which it is attached or carried”.
-
8.110 If section 2A applied to automated driving, the result would be that a user-in-charge who set off with an obviously dangerous load could be found guilty of dangerous driving and causing death by dangerous driving.
-
8.111 We think it right that such a user-in-charge should be liable to the same penalties as a driver in such circumstances. However, imposing these penalties through a dangerous driving offence would introduce too much confusion into what we intend to be a clear message. We wish to reassure users-in-charge that they cannot be prosecuted for dangerous driving or for the other driving offences set out in sections 1 to 3A of the Road Traffic Act 1988. Instead we think that a user-in-charge who uses a vehicle in an obviously dangerous state should be prosecuted for another offence, which more clearly signals the non-dynamic nature of the wrongdoing.
The effect of section 40A of the Road Traffic Act.
A person is guilty of an offence if he uses, or causes or permits another to use, a motor vehicle or trailer on a road when—
-
(a) the condition of the motor vehicle or trailer, or of its accessories or equipment, or
-
(b) the purpose for which it is used, or
-
(c) the number of passengers carried by it, or the manner in which they are carried, or
-
(d) the weight, position or distribution of its load, or the manner in which it is secured,
is such that the use of the motor vehicle or trailer involves a danger of injury to any person.
-
8.113 A user-in-charge who set off in a vehicle in a dangerous condition would commit this offence. However, it is a minor summary offence, which differs from the section 2A offence in not requiring the use of the vehicle to be obviously dangerous. While a conviction for dangerous driving carries a maximum sentence of two years imprisonment,394 the maximum penalty for a breach of section 40A is a £2,500 fine and three penalty points.395 Furthermore, there is no aggravated form of section 40A. If, for example, a load falls off and causes a death or serious injury, it would not be possible to reflect this in the charge. In circumstances similar to Crossman, this would leave a mismatch between the penalties for a driver and for a user-in-charge.
A new offence for users-in-charge
-
8.114 It is important to underline that users-in-charge do not need to monitor the driving environment while the ADS is engaged. They are, however, required to check the state of the vehicle and its load before setting off on their journey. To achieve this end, we recommend that users-in-charge should have an immunity from the dangerous driving and aggravated dangerous driving offences. Instead, users-in-charge should be subject to a new offence to replicate the non-dynamic elements currently covered by section 2A(2).
-
8.115 We therefore recommend that a user-in-charge should be subject to a new offence of using a vehicle in a dangerous condition in circumstances which mirror those in section 2A(2). There would also be an aggravated offence where the breach led to a death or serious injury.
-
8.116 On this basis a user-in-charge would commit an offence if:
-
8.117 In deciding whether the vehicle is in a dangerous state, regard should be had to anything attached to or carried on or in it and to the manner in which it is attached or carried.
-
8.118 A user-in-charge would face an aggravated form of the offence if the use caused death or serious injury.
-
8.119 We see these offences as equivalent in seriousness to dangerous driving, causing death by dangerous driving and causing serious injury by dangerous driving. They should therefore carry similar penalties.
Recommendation 46.
Instead, a user in charge should be liable for a new offence of using a vehicle in an obviously dangerous state. The offence would be committed where:
-
(1) the user-in-charge used the vehicle in a dangerous state; and
-
(2) it would be obvious to a competent and careful user-in-charge engaging the ADS that using the vehicle in its current state would be dangerous.
In deciding whether the vehicle is in a dangerous state, regard should be had to anything attached to or carried on or in it and to the manner in which it is attached or carried.
An aggravated form of the offence should apply where the use caused death or serious injury.
Drafting the dynamic/non-dynamic distinction
8.121 There are other driving offences which may be committed in either a dynamic or nondynamic way. The distinction between dynamic and non-dynamic offences will need careful drafting. Our current view is that it might be helpful to include both a general principle, together with two non-exhaustive lists of common dynamic and non-dynamic offences. It would also be useful to have some provisions to amend the lists in the light of experience. Amendment might be necessary either to clarify areas of uncertainty or to adapt the distinction to an ADS’s capabilities.
CRIMINAL LIABILITY FOLLOWING HANDOVER
8.122 Following a completed handover, either voluntary or in response to a transition demand, the user-in-charge would become a driver. They would be subject to all the ordinary responsibilities of a driver. From this point, they would be required to pay due care and attention and would be liable for any infringements of road rules or standards. This would include offences that did not require proof that the defendant’s driving fell below the standard of a reasonably competent and careful driver.
A specific defence where problems are brought about by the ADS
8.123 We do not think that an individual should be penalised for a breach that was brought about by the ADS and which a competent and careful driver could not reasonably prevent. In Consultation Paper 3 we illustrated this problem with the following example:
While in self-driving mode, an automated vehicle mistakenly turns into a one-way street in the wrong direction. The user-in-charge takes over, but is unable to avoid a collision. Alternatively, no collision takes place, but in the moment the user-in-charge takes over, they are driving in the wrong direction, and absent an exception they are guilty of an offence simply on that basis.396
8.124 We provisionally proposed that drivers should have a specific defence to an offence committed following takeover as a result of the actions of the ADS. We suggested that the defence should be available if “given the actions of the ADS, a competent and careful driver could not have avoided the offence”.
8.125 Consultees agreed with the principle that a driver who takes over from an ADS should have a defence to a criminal charge where the problem was caused by the ADS.397 For example, the Association of Personal Injury Lawyers (APIL) thought it:
crucial that users of AVs are not discouraged from correcting a system error because of the risk of being criminally liable and prosecuted for an offence which they could not have avoided.
8.126 A number of consultees argued, however, that the proposed test was too narrow, setting “too high a bar”. 398The Bar Council said:
“Could not have” is a test that risks imposing too high a burden on the user-in-charge who takes over control of the vehicle. There is a range of acceptable human driving skill - above the level of what should be considered criminal. That range applies among individuals of course, but also within individuals: the hypothetical “competent and careful driver” cannot sensibly be considered to drive at all times at only one specific level of skill.
If a driver looks up from a secondary activity to see an immediate risk of collision, they are likely to try to take over without having had time to reengage with the driving task. In this situation, their best efforts to avoid a crash may fall below the standard of a driver who is already fully engaged. Criminalising this behaviour is unlikely to be an effective deterrent and may not improve safety.
-
8.128 We find these arguments convincing. We would not wish to require an unreasonably high standard from users-in-charge. Research indicates that people often find it difficult to re-engage with driving after diverting their attention.399
-
8.129 We have therefore widened the defence. Rather than considering what a competent and careful driver “could” or “could not” have done, the court should focus on the standard which would reasonably be expected of a competent and careful driver in the circumstances. This responds to consultees’ comments that the test should refer to “all the circumstances” rather than merely the “actions of the ADS”; 400and should include a “reasonableness” element.401
Recommendation 47.
FAILING TO RESPOND TO A TRANSITION DEMAND
-
8.131 In Chapter 3 we explain that a transition demand is an alert issued by an ADS to a user-in-charge to take over driving, which ends following a “transition period”. A transition demand must be signalled through clear visual, audio and haptic alerts. It must also give the user-in-charge sufficient time to gain situational awareness.
-
8.132 If the user-in-charge takes over driving before the end of a transition period, they will become a driver at the moment they take over. However, there is the possibility that a user-in-charge may fail to respond to a transition demand in time. If this occurs, a vehicle will be programmed to mitigate any risk, but it may not be completely safe: initially, AVs are likely to come to a gradual stop in lane.402
-
8.133 Thus safety requires users-in-charge to respond to transition demands. The law should impose consequences on a user-in-charge who fails to take over.
Reacquiring driver obligations
-
8.134 We recommend that, following the end of the transition demand period, the user-in-charge should reacquire the legal obligations of a driver even if they have not taken control of the vehicle. Their immunity from dynamic driving offences would cease. As a consequence, the user-in-charge would become criminally liable for anything that the vehicle does following the end of the transition demand period.
-
8.135 We have considered an example where regulators have authorised a system that comes to stop in lane on a motorway. Here, a user-in-charge who fails to respond to the transition demand would be liable for the criminal offence of stopping unnecessarily in an active motorway lane. 403Stopping in lane may also constitute driving without due care and attention or, possibly, dangerous driving.
-
8.136 This does not mean that failing to respond to a transition demand would automatically amount to a criminal offence or constitute an offence in itself. If the vehicle is able to park itself safely and legally at the side of the road, no offence will have been committed. Our intention is to adopt a flexible approach to the penalties for failing to take over that depends on the consequences. Initially, regulators may allow manoeuvres which amount to a criminal offence, possibly a serious one. As the sophistication increases, it may become a more minor issue, as a failure to respond becomes less and less safety critical.
Recommendation 48.
8.137 The new Act should provide that a user-in-charge who fails to respond to a transition demand will acquire the legal responsibilities of a driver at the end of the transition period.
Medical emergencies
8.138 Consultees were concerned about what would happen if a user-in-charge is unable to respond to a transition demand because they have suffered a medical emergency, such as a heart attack or stroke.
8.139 In Consultation Paper 3, we suggested that the issue would be adequately addressed by general criminal law principles exempting drivers in these circumstances. However, several consultees asked for specific statutory provisions. AXA UK suggested an explicit exemption from criminal liability for “those failing to respond to a transition demand” due to “proven health emergency”. The SMMT argued for an amendment to the Motorway Traffic Regulations “and other relevant traffic laws” to clarify this issue.404
8.140 The current law on medical emergencies while driving usually comes to the right result: a person has a defence if they were unable to drive as a result of a medical emergency they could not foresee. However, the way that the law reaches this result is complex and uncertain.
8.141 The law in this area differs between England and Wales on the one hand and Scotland on the other. Below we consider each in turn.
The law in England and Wales
8.142 While some defendants suffering medical emergencies may have recourse to the defence of (non-insane) automatism, some may be forced to rely on the defence of insanity (also referred to as insane automatism). To distinguish between these two defences, the courts have relied on an arbitrary distinction between loss of control due to an “external factor” (such as substances or a blow to the head) and loss of control due to an “internal factor” (a malfunctioning of the body). While involuntary conduct caused by an “external factor” is classed as (sane) automatism, conduct caused by an “internal factor” is classed as insanity (or insane automatism).405
8.143 In 2013, the Law Commission of England and Wales published a discussion paper which criticised this distinction. 406Two cases of diabetic defendants illustrate the problem. One suffered a hypoglycaemic episode as a result of failing to eat after taking insulin.407 The other suffered a hyperglycaemic episode as a result of failing to take his prescribed insulin. 408The first defendant was able to plead sane automatism since the insulin, an external factor, had caused the episode. The second defendant was forced to rely on insanity because his loss of control was caused by his diabetes.
8.144 As a result, the legal definition of “insanity” stretches far beyond what a layperson would understand by the term. Defendants have had to plead insanity when suffering from epilepsy 409or sleepwalking conditions. 410The label of insanity is clearly inappropriate in such cases. As the 2013 discussion paper pointed out, epileptics, diabetics and others with mental conditions “might understandably be reluctant to plead the defence”. 411A plea of insanity also has practical consequences. Firstly, those pleading insanity must discharge a higher burden of proof.412 Secondly, unlike a successful plea of (sane) automatism, a successful insanity plea does not result in an acquittal. Instead it results in a “special verdict” of “not guilty by reason of insanity”.413 The courts then have powers to order measures such as a restrictive hospital order or supervision order. 414This is referred to as a “disposal” rather than a sentence but can clearly have severe implications for those affected.
The need for reform in England and Wales
8.145 The issue of medical emergencies applies to all driving offences, not just those at the end of the transition period. The law of England and Wales in this area is clearly unsatisfactory. It is unnecessarily complex and may require an unhelpful resort to the law of insanity. However, we think that the issue should be addressed for all driving offences, not simply those following a transition period.
8.146 Following its 2013 Discussion Paper on Insanity and Automatism, the Law Commission of England and Wales intends to recommence work to produce a report as soon as time allows. Following this report, we hope that the Government will introduce comprehensive reform in this area.
The law in Scotland
8.147 In Scotland, a defence of automatism, if upheld, marks driving as involuntary 415and prevents the driver from being treated as driving the vehicle. Case law indicates that the defence of automatism can be relied on solely for involuntary conduct due to external factors 416which the accused is not bound to foresee. External factors are factors emanating from outwith the mind or body of the driver. One such factor is the administration of a drug unbeknown to the driver. Factors which are not external include epilepsy, diabetes or a heart attack. 417In practice prosecutors appear not to follow this distinction between external and internal factors. 418Nevertheless it is supported by binding case law. Accordingly, whether a driver who suffers an unpredictable medical emergency can be excused from a criminal offence arising from their driving depends in part on the source of the emergency. If the defence of automatism does not apply, the person charged might have to establish that they were unable to appreciate the wrongfulness of the conduct by reason of a mental disorder. 419If they did so, the court could make a compulsion order which could involve the person being detained in a special hospital.420
The need for reform in Scotland
-
8.148 Scots law in this area appears not to cater for medical emergencies which are not caused by factors external to the body or mind, or by mental disorders. That is an unsatisfactory situation.
-
8.149 We consider that drivers should be able to rely on a legal defence to criminal proceedings if they suffer a sudden medical condition which deprives them of the ability to intervene, such as a heart attack or stroke. The defence should not apply if the emergency was self-induced or could have reasonably been anticipated. Existing case law offers a helpful guide. Scots law already provides that any external factor must be one which the accused “was not bound to foresee”.421
-
8.150 Unlike the position in England and Wales, the Scottish Law Commission does not currently have a project on the general reform of the law of automatism. Given this, and the views of consultees mentioned above, we think that it is appropriate for the new Act to create a defence in Scots law for users-in-charge who become drivers where owing to unforeseeable circumstances caused by a medical condition they are unable to take over driving or are seriously impaired from taking over driving.
Recommendation 49.
-
(1) the accused was required to resume driving upon the expiry of a transition demand;
-
(2) the accused’s ability to resume driving was seriously impaired by a sudden medical condition;
-
(3) this condition or impairment was not caused by the accused; and
-
(4) the condition could not reasonably be anticipated by the accused.
PROFESSIONAL USERS-IN-CHARGE AND PASSENGER SERVICES
-
8.152 In our view, no fundamental shift is required to accommodate user-in-charge features within existing passenger service legislation. Where taxi, private hire or bus services are provided with a professional user-in-charge sitting at the controls, the legislation continues to fulfil its purpose. There is still a person in the vehicle who is legally responsible for issues such as roadworthiness and insurance and who can move the vehicle if it comes to a halt inappropriately. Under our recommendations, the current law of taxi, private hire and public service vehicle licensing would continue to apply to such vehicles. For the purposes of that legislation, the user-in-charge would be treated as a “driver”.
-
8.153 We do not think this requires significant legislative amendment. It could probably be done by general provisions, stating that a user-in-charge would be considered as a driver for the purposes of the passenger service legislation.
Chapter 9: NUIC operator licensing
-
9.1 In Chapter 5 we explained that each automated vehicle would be authorised with specified automated driving system (ADS) features. ADS features fall into two categories: those authorised for use with a user-in-charge (UIC features); and those authorised for use with no user-in-charge (NUIC features). Here we consider NUIC features. When we refer to “NUIC vehicles” we mean vehicles equipped with NUIC features.
-
9.2 In this chapter, we recommend that when a NUIC ADS feature is engaged, the vehicle should be overseen by a licensed NUIC operator. We start by explaining the development of this recommendation. We then discuss what it means to “oversee” a NUIC vehicle. We set out our recommended scheme of NUIC operator licensing for all vehicles. We consider the specific responsibilities that relate to passenger services in the following chapter.
POLICY DEVELOPMENT: FROM HARPS OPERATORS TO NUIC OPERATORS
Consultation Paper 2
-
9.3 In Consultation Paper 2 we focused on Highly Automated Road Passenger Services (HARPS). We recommended a national scheme of basic safety standards for operating a HARPS, which would be enforced through a national system of operator licensing. This was widely supported.
-
9.4 We then considered how HARPS might be regulated to achieve wider transport goals. We looked at how to promote accessibility for older and disabled people, control congestion and integrate HARPS with public transport. There was considerable support for developing national standards for accessibility. However, there was less agreement on other aspects of our proposals,422 with particular controversy over the balance between national and local decision-making, quantity restrictions and road pricing.423
-
9.5 Consultees expressed concern about the complexity of the distinction we attempted to draw between privately-owned vehicles and passenger services.424 They were also concerned that our scheme would not cover freight vehicles. Following the Covid-19 pandemic, there has been increased interest in enabling goods deliveries without human drivers. Although our terms of reference asked us to concentrate on passenger service, consultees wished to see any new legislation cover freight services as well.
Consultation Paper 3
-
9.6 In the light of these concerns, we simplified our proposals. In Consultation Paper 3, we provisionally proposed that all NUIC vehicles should be supervised and maintained by a licensed operator. This would apply whether the vehicle provides passenger or freight services, is for private use, or is something else entirely (such as a snow plough). All NUIC operators would be subject to the same general “Tier 1” safety duties, with additional “Tier 2” duties for specific services, such as passenger services or freight. This drew widespread support.425
-
9.7 We asked if all NUIC operators should be subject to a list of “Tier 1” duties to, for example, “supervise”, maintain and insure vehicles, and install safety-critical updates. Again, this was widely supported.426
THE NEED FOR A NUIC OPERATOR TO OVERSEE THE JOURNEY
-
9.8 In our view, every vehicle that travels without a driver or user-in-charge should have a licensed NUIC operator to help it navigate obstructions and to deal with incidents. In Consultation Paper 3 we referred to duties such as these that arise during the course of the journey as “supervision” duties. We now label them as “oversight” duties. Here we consider the nature of “oversight duties” and the challenges they pose.
Terminology
-
9.9 The most controversial aspect of the proposal in Consultation Paper 3 was our use of the term “supervision”. Several developers pointed out that, in the SAE Taxonomy, supervision means something different. It refers to a human driver’s activities at SAE Levels 1 and 2.427 Waymo commented:
If “supervise” as used here is meant to convey a different meaning from the J3016 meaning, that should be clearly explained.
-
9.10 Other respondents also found the reference to supervision to be confusing and unhelpful.428
-
9.11 The SAE’s work is designed to reduce confusion by providing a common language to discuss driving automation. We respect this endeavour and do not wish to use a specific SAE term to mean something different. We now use the phrase “oversight” to refer to tasks conducted by staff while NUIC vehicles are in use.
What oversight duties will arise?
Event-driven provision, by a remotely located human, of information or advice to an ADS-equipped vehicle in driverless operation in order to facilitate trip continuation when the ADS encounters a situation it cannot manage.429
-
(1) The ADS encounters “an unannounced area of road construction” which the system cannot navigate: the “remotely located human provides a new pathway for the vehicle to follow around the construction zone”.
-
(2) The ADS “detects an object in its lane that appears to be too large to drive over and stops. A remote assistant uses the vehicle’s cameras to identify that the object is an empty bag that can be safely driven through/over” and instructs the vehicle to proceed.
-
(1) authorising each trip (eg payment, trip route selection);
-
(2) managing emergencies, summoning or providing remote assistance as needed, responding to customer requests and breakdowns; and
-
(3) serving as the responsible agent vis-a-vis law enforcement, emergency responders and other authorities for vehicles while in use.431
-
9.15 Oversight duties therefore involve both remote assistance and some fleet operations. They include, for example, checking the route to ensure that tolls and charges have been paid; checking a load is secure before the journey starts; managing emergencies, dealing with law enforcement agencies; and providing advice to the vehicle about how to deal with an obstruction in its way.
Remote assistance compared to remote driving
-
9.16 The SAE distinguish between remote assistance and remote driving: with assistance, the ADS rather than the human carries out the manoeuvre. Consultees stressed to us that a remote assistant is not a driver. A vehicle is only self-driving if it makes the decision about its safe path (rather than simply implementing remote instructions).432 As P3 Mobility put it, for the vehicle to be self-driving “the ADS would need to judge whether the instructions received from the remote [assistant] represent a safe path ahead and also whether the manoeuvre is legal”.
-
9.17 A vehicle might rely entirely on remote staff who monitor the driving environment and intervene in emergencies. If so, it would fall outside our scheme: it is remote human driving, not self-driving. It does not meet the definition of self-driving discussed in Chapter 3.433
-
9.18 Another possibility is that a NUIC feature can drive the vehicle in most operational design domains, but not all. In some limited circumstances, a remote driver may be required to take over. Such a NUIC feature would need to have a NUIC operator while the NUIC feature is engaged. As we explain below, when applying for a licence, the NUIC operator would be required to state how much they relied on remote driving, and how this could be done safely.
Is the remote assistant role safety-critical?
-
9.19 Even though a remote assistant is not driving, they might still cause harm. To use the SAE example, an assistant might mistakenly label an obstacle as a plastic bag when the bag contains concrete.434
-
9.20 An assistant might also be called on to advise a vehicle to carry out a manoeuvre that breaches a statutory provision. 435In Consultation Paper 1, we pointed out that in England, driving on the pavement is illegal 436but the provision is not enforced if the driver has a good reason. We asked whether automated vehicles should be permitted to mount the pavement to allow emergency vehicles to pass. A majority of consultees (70 out of 124, 56%) said yes. As Stewarts Law put it, without this possibility, AVs are unlikely to be able to share roads easily with emergency vehicles. Several consultees argued that this should be done only at low speeds, or with human sign-off.
-
9.21 In Chapter 6, we recommend a forum to collaborate on road rules. This is just the sort of issue that the forum will need to consider in the light of practical experience, weighing possible dangers to pedestrians with delays to emergency vehicles. Given the difficulty of setting hard rules to deal with situations of this type, one likely outcome is to require remote assistants to use their human skill and judgement.
-
9.22 If assistants are required to use good judgement, this leads to the possibility of poor judgement if assistants are tired, badly equipped, inadequately trained or required to oversee too many vehicles at once. Staff will therefore need to be provided with the right equipment and properly trained and supervised. This raises challenges, which we explore next.
The challenges of running a remote operations centre
-
9.23 Under our scheme it is not absolutely necessary for a NUIC operator to have oversight through a remote operations centre. In some limited circumstances, a NUIC operator could maintain oversight in other ways. In Chapter 8 we imagine possible future developments in which (for example) a person walks alongside a refuse collection vehicle; or staff oversee vehicles by being present in a car park.437
-
9.24 However, we anticipate that in the vast majority of cases NUIC operators will maintain oversight through a remote operations centre. In Consultation Paper 3 we looked briefly at the challenges of running remote operation centres, drawing on work for the United Nations Economic Commission for Europe (UNECE) by a group of human factor experts known as Human Factors in International Regulations for Automated Driving (HF-IRADS).438
Connectivity
-
9.25 The first challenge is connectivity. As HF-IRADS point out, the feeds required for proper remote operation will place great demand on the bandwidth and potentially lead to latency 439or loss of contact with the vehicle. If the operator needs to control the vehicle, even a constant time lag can be a problem. However, variability in lag can be even more of a challenge to good performance than the lag itself.440 As the HF-IRADS paper notes, “consistency of transmission could be a basic requirement”.441
Cyber-security
Equipment
-
9.27 Staff will need the right equipment to understand what is going on. It may be difficult to judge distance simply from video feeds onto flat screens. Screens can also lead to a decreased sense of urgency and less empathy. 442Although information about some aspects of vehicle movement can be provided in different ways, this risks information overload, especially when the operator is overseeing multiple vehicles.
-
9.28 Remote operators also report boredom, inattention, distraction and motion sickness. 443There is considerable work to be done in understanding how to design equipment and systems of work that overcome these challenges.
Training, working conditions and rest breaks
-
9.29 Remote assistants will need specific, targeted training. They will also need health checks and regular breaks. In Consultation Paper 3 we looked briefly at the regulation of other safety critical control centres, such as air traffic control or railway operating centres. An air traffic controller, for example must be given a half hour break during or after every two-hour period.444
-
9.30 On railways, tasks such as signalling, dispatching or “receiving and relaying of communications” are defined as “safety critical work”. 445Controllers must ensure that people carrying out such work (including control centre staff) have been assessed as fit for that work; 446and do not carry out these tasks if affected by fatigue.447 The Office of Road and Rail (ORR) has issued guidance to avoid fatigue, including minimum breaks.448
-
9.31 Little information is available about the required ratio of staff to vehicles in a remote operating centre. One of the perceived advantages of automated driving is that it will reduce the staff required to run a service. The hope is that vehicles may drive themselves for many hours during which no human assistance is required. However, external circumstances may cause many vehicles to require assistance at the same time. At the time of writing, external events included flash floods, queues at petrol stations and protestors on motorways. 449NUIC operators will need to provide sufficient staff to cover times of peak demand, not simply average demand.
Communication with passengers, the public and emergency services
-
9.32 Following an incident, staff will need to be able to communicate with passengers, other road users and the emergency services. In Consultation Paper 2 we asked for feedback about accessibility and the outcomes people expected. The ability of passengers to talk to a person was seen as essential.450 Following an incident, there will also be a need to communicate with other road users - who might be angry, distressed or in shock. Similarly, the police and ambulance services will need to talk to a member of staff.
-
9.33 Good communications will depend partly on the quality of connectivity and equipment and partly on human skills. The communication skills required of remote operation staff will be considerable.
Regulating the organisation or the individual?
Approaches in other jurisdictions
-
9.35 We have considered the approaches taken in other jurisdictions to this question. In August 2021, the Israeli Government published a Bill to enable experiments in AV use.451 The Bill provides that the Minister will determine in regulations detailed instructions regarding the management and operation of control centres. This includes necessary employee competencies; criminal records checks and training. The operating plan should also provide details regarding a safety plan for the centre in various situations.
-
9.36 The emphasis is on the management and operation of the centre.
-
9.37 By contrast, the German L4 Law, introduced to enable the deployment of vehicles with no element of human driving, emphasises the role of the individual “technical supervisor”. 452The law stipulates that the technical supervisor must not only be a licensed driver for the relevant vehicle. 453The technical supervisor must also be a qualified mechanical, vehicle, electrical or aerospace engineer or certified technician in any of these areas. 454In addition, the technical supervisor must also complete a course offered by the manufacturer of the vehicle.455
-
9.38 In France, criminal responsibility for the safety of automated road transport systems is shared between the operator and service organiser and the individual “authorised person”. 456Article 5 provides that any remote intervention (which may go beyond assistance to include remote driving) may only be carried out by an “authorised person”. 457An authorised person must hold a driving licence corresponding to the category of vehicle in question.458
Our approach
-
9.39 At this stage we do not specify the training or qualifications that remote assistants will need. Instead, our focus is on regulating the organisation responsible for the way that oversight is provided.
-
9.40 The main challenge facing organisations will be to combine connectivity, suitable screens and equipment with sufficiently trained and alert staff. Safety may be less about individual skill and more about the investment and equipment needed (for example) to provide connectivity or suitable screens.
-
9.41 Clearly, if staff drive vehicles remotely, they will need to hold the appropriate driving licences. It is likely that remote assistants will also be licensed drivers. However, we are not in a position to make recommendations regarding assistants’ credentials at this stage. Instead we envisage that NUIC operators will be required to state how their staff are trained and qualified and show why this is safe. Their claims will then be scrutinised by regulators.
-
9.42 Staff involved in remote driving will face the same criminal liabilities as other drivers. However, we do not recommend any new criminal offence relating to individual assistants. New criminal liability could be used to blame overworked or underequipped staff, while deflecting attention from organisational failings.
OTHER NUIC OPERATOR DUTIES
-
9.43 In Consultation Paper 3 we provisionally proposed that, in addition to oversight duties, NUIC operators should also be responsible for maintenance, insurance and cybersecurity. We are grateful to consultees for their detailed consideration of these issues.
Maintenance
-
9.44 In Chapter 8 we consider how far a user-in-charge should be responsible for ensuring that a vehicle is roadworthy. The issue provoked considerable discussion about how easy it will be to maintain AVs and install software updates.
-
9.45 Similar issues arise in the context of NUIC vehicles.459 Although many consultees agreed that the NUIC operator should be responsible for maintenance, others saw the Authorised Self-Driving Entity (ASDE) as playing a role. Nova Modus thought that the ASDE should be responsible for “complex technical maintenance”. The Society of Motor Manufacturers and Traders (SMMT) thought that maintenance duties should be “shared” between the operator and ASDE “based on a contractual agreement”.
-
9.46 Others suggested that private owners should be responsible for routine maintenance. Mobileye said that if a NUIC was privately owned, the operator should “only be responsible for issues that require technical skills, such as installing software updates and maintaining cyber security”.
Insurance
-
9.47 Most consultees thought that the operator should be responsible for insuring the vehicle. Pinsent Masons said that in theory the obligation to insure could be passed to the registered keeper. However, it would be preferable for an operator to retain this duty “at least until the technology becomes common enough (and understood enough) so individuals can be trusted to take these responsibilities on”.460
-
9.48 A few, such as Mobileye, said that if a NUIC is privately owned the duty to insure should fall on the owner. The British Insurance Brokers’ Association pointed to a risk that “just a few large leasing companies own the market not only for vehicles, but also in the arrangement of insurance”.
Safety-critical updates and cybersecurity
-
9.49 Most respondents agreed that a NUIC operator should be responsible for installing safety-critical updates and for cybersecurity, although some respondents offered qualifications.
-
9.50 Both Aviva and the joint response from ABI/Thatcham Research emphasised that this duty should “complement, not remove, the duty of the vehicle manufacturer with regards to cybersecurity”. Again, the SMMT thought that these duties should be shared between the ASDE and the NUIC operator on the basis of a contractual agreement. They noted that the ASDE, rather than the operator, is best-placed to determine what software updates are safety-critical.
Other duties: conclusion
-
9.51 It is clear from the discussion that there is not a one-size fits all solution to how maintenance and insurance duties should be allocated. There are several possible models of how NUIC operation might work, and duties will need to be allocated flexibly depending on the model used. We explore possible models, before making recommendations about the design of a NUIC operator licensing scheme.
FOUR MODELS OF NUIC OPERATION
-
(1) The ASDE and NUIC operator are the same organisation, providing a service in an integrated way. We think this likely in the initial stages for high risk operations, such as passenger services.
-
(2) The NUIC operator is a separate entity from the ASDE. This may be more common for relatively low risk operations, such as light low speed freight vehicles or pods.
-
(3) The NUIC operator provides a service for private owners of NUIC vehicles.
-
(4) A NUIC feature works in a specific location (such as a car park), such that oversight is only required in a limited area.
-
9.53 These four models are not exhaustive nor mutually exclusive. For example, a single entity may fulfil both the ASDE and NUIC operator role and provide a service for privately-owned vehicles. We use them here to explain how we see NUIC operator licensing working. We then make formal recommendations which are designed to be sufficiently flexible to apply to all four models.
Model 1: Combining the ASDE and operator roles
One possible option
-
9.54 In Consultation Paper 3 we said that although an ASDE may also be a NUIC operator, the two entities would not be required to be the same. This differs from the approach taken by the Uniform Law Commission in the USA. The Uniform Law Commission proposed that a single “Automated Driving Provider” should cover all aspects of complying with the technical and legal requirements for AVs.461
-
9.55 The advantage of a single integrated organisation is that responsibilities are clear: if something goes wrong, the ASDE and operator cannot blame each other. The disadvantage is that requiring one combined organisation would reduce competition. It would effectively give a few major developers a monopoly of all automated passenger and freight services, reducing innovation in how these services are provided and increasing prices.
-
9.56 Most consultees agreed that regulation should allow the ASDE and licensed operator to be different entitles. FirstGroup said the proposal “retains the maximum market flexibility”. KPMG thought that it would “encourage more entrants into the market and greater innovation”: it could “inject more private capital into the market” through fleet purchase and management, with “more competition and higher levels of customer service”.
-
9.57 However, several consultees pointed to the disadvantage of allowing separate organisations, which is the potential for ambiguity, duplication or gaps in the parties’ responsibilities. 462Consultees raised several problems which might arise at the margin of the two roles. For example, it might not be clear whether poor installation of a software update arose from problems with the update (an ASDE responsibility) or from problems with installing it (a NUIC operator responsibility).
-
9.58 In the early days, we anticipate that it will be common for a single organisation to act as both an ASDE and a NUIC operator. There will be many aspects of safe operation that involve co-ordination between the two roles. We are therefore keen that it should be relatively simple to act as a combined ASDE/NUIC operator, with a flexible boundary between the two roles.
-
9.59 That said, our system is also designed to allow the two roles to be differentiated, so that independent NUIC operators can enter the market. It is in the interest of competition to allow logistics or passenger transport providers to buy or lease vehicles with NUIC features and operate them in more innovative or economical ways.
Combined authorisation and enforcement for combined entities
-
9.60 Under our scheme, an ASDE would be able to apply to the authorisation authority to act as both an ASDE and a NUIC operator. It would submit a combined safety case to the authorisation authority, covering all the issues listed both in Chapter 5 and here.
-
9.61 In these circumstances, we envisage that the authorisation authority will assess the organisation and the safety case as a whole. If satisfied, the authorisation authority would then authorise the vehicle, specify the NUIC features, register the organisation as an ASDE and provide the organisation with a NUIC operator licence.
-
9.62 Following authorisation, the in-use regulator would be responsible for ensuring that the organisation fulfilled both its ASDE and NUIC operator duties. In Chapter 6, we explain that the in-use regulator will investigate traffic infractions and apply a flexible range of regulatory sanctions, including compliance orders and civil penalties. In our view, the same sanctions should apply for breaches of the terms of the NUIC operator’s licence. This means that the in-use regulator will not need to distinguish between a fault with the ADS and a fault with NUIC operation. The regulator will have power to address both issues in the same way.
Model 2: A separate NUIC operator
-
9.63 Our scheme allows for the ASDE and NUIC operator to be separate organisations. This might be particularly attractive for relatively low risk use cases. One possibility might be a light, low speed delivery pod, operating mainly on paths shared with pedestrians.
-
9.64 If an ASDE intends to supply its vehicles to other NUIC operators, the ASDE will need to specify how the NUIC features can be operated safely. When the ASDE submits it safety case to the authorisation authority, it should specify what must be done to oversee and maintain the vehicle. These specifications will need to be approved as part of the authorisation process.
Applying for a licence showing how ASDE requirements are met
-
9.65 Once an ASDE has reached an agreement to supply vehicles to a particular organisation, that organisation would then apply for a NUIC operator licence to operate the vehicle in question. It will need to show how it will implement the ASDE’s specifications and ensure safety generally. The NUIC operator application may be made at the same time as the authorisation application or after it.
-
9.66 We would expect the NUIC operator to fulfil the duties we have discussed, unless the ASDE has specifically stated that these are not necessary or has undertaken to fulfil them itself. These responsibilities should be specified in the licence conditions. These licence conditions would then be enforced through a system of regulatory sanctions.
Model 3: Privately-owned NUIC vehicles
Our Consultation Paper 2 proposal
-
9.67 In Consultation Paper 2 we took a light touch approach to regulating private NUIC vehicles. We provisionally proposed that insurance, maintenance and oversight should lie with the registered keeper. The legislation should include a regulationmaking power to require registered keepers to outsource duties to a licensed provider, if this proved desirable.
-
9.68 Consultees expressed considerable disquiet about this proposal. They found our tests for distinguishing between privately owned vehicles and passenger services too complex. They did not think they would work in a world of short-term leasing and peer-to-peer lending platforms. More fundamentally, consultees were concerned that private individuals would lack sufficient expertise to fulfil the responsibilities placed on them. Oversight, cybersecurity and installing software 463posed particular concerns: consultees thought that these onerous, technical tasks should be carried out by skilled professionals.
Our Consultation Paper 3 proposal
-
9.69 In Consultation Paper 3 we provisionally proposed that all vehicles authorised for use on roads or other public places with no user-in-charge should have arrangements in place with a licensed operator. Most consultees agreed. As HORIBA MIRA put it, “the proposal is much simpler and results in more consistent requirements”.
-
9.70 However, many saw it as an interim measure. For example, Aviva and the joint response from ABI and Thatcham Research agreed with the proposal in the short term. However, they thought it would “likely need to be revisited when NUIC vehicles become more advanced and a private citizen can make use of the technology safely”.
Burges Salmon also welcomed the proposal but restricted their comments to “the early deployment stage”.
-
9.71 There were many concerns that private owners should not face unnecessary costs, by (for example) being required to buy maintenance and insurance through a NUIC operator. Mobileye said it was important “to make the experience of privately owning an AV similar to the experience of privately owning any other vehicle”.
Our current view
-
9.72 We continue to believe that, at least initially, all vehicles used without a driver or userin-charge on a road or other public place should be overseen by a licensed NUIC operator.
-
9.73 The process of applying for a NUIC operator licence to oversee privately-owned vehicles would be similar to the process we outlined above. The ASDE would specify what must be done to oversee and maintain the vehicle, and the specifications would be approved by the authorisation authority. The NUIC operator would then apply for a licence to operate the vehicle-type in question. It would need to show how it will implement the ASDE’s specifications and ensure safety generally. The application would be assessed by the agency designated for the purpose.
-
9.74 Again, the responsibilities of the NUIC operator will be set out in the terms of the licence and enforced through a system of regulatory sanctions. This will provide flexibility over how far the NUIC operator will be responsible for insurance and maintenance, and how many duties can rest with the registered keeper.
-
9.75 We would be cautious about assuming that owning a dedicated NUIC vehicle will be just the same as owning a conventional vehicle. At present, most registered keepers are drivers. By contrast, NUIC vehicles are likely to appeal to those who are unable to drive, because (for example) they are too old or have a disability. The new group of non-driving registered keepers may not be well placed to assume onerous responsibilities, particularly ones that involve complex or technical skills.
-
9.76 At least in the early stages, it may be appropriate to require the NUIC operator not only to provide remote oversight, but also to install software updates and carry out maintenance checks. However, our scheme includes flexibility to allow this to change in the light of experience.
Model 4: NUIC operation confined to a geographically limited location
-
9.77 The final model is where a NUIC feature is only engaged in a specified place, such as an automated valet parking (AVP) service in a particular car park.
-
9.78 Our project is confined to “roads or other public places”, where the public has access. 464It is possible that AVP may take place in a car park which could only be used by NUIC vehicles, and where any people in it would be staff or specially screened visitors. This would not be a public place and our recommendations would not apply. The feature would not require authorisation, and its operation would not need to be licensed. If problems arose, they would fall within the law of occupier’s liability and the Health and Safety at Work etc Act 1974.
-
9.79 Public car parks are much more complex environments, where children and pets spill out of vehicles, and harassed parents struggle with buggies. Here human skills will be needed to identify unusual objects or plot a way around obstructions. Staff will also need to manage incidents in the event of a collision or injury.
-
9.80 If a public car park were to offer an AVP service, then a licenced NUIC operator would need to oversee the operation. This may be through a remote operations centre or could involve having staff onsite.
-
9.81 However, in contrast to our earlier examples, the NUIC operator would only be responsible for oversight duties, not for insurance or maintenance. The responsibilities set out in the NUIC operator’s licence would be relatively limited, with the vehicle’s user responsible for insurance and roadworthiness in the usual way. Our intention is that where NUIC operation is confined to specific and limited locations, the licensing system should not be unduly onerous.
RECOMMENDATION: ALL NUIC VEHICLES TO HAVE A LICENSED OPERATOR
-
9.82 Given the many challenges of operating NUIC vehicles, we recommend that when a NUIC feature is engaged on a road or other public place, the vehicle must be overseen by a NUIC operator. In Consultation Paper 3 we provisionally proposed that this should be enforced through a criminal offence.465 This drew majority support and now forms part of our recommendations.466
-
9.83 We therefore recommend that it should be an offence to use a vehicle on a road or other public place without a driver or user-in-charge, unless two conditions are met. The vehicle must be equipped with an authorised NUIC feature and arrangements must be in place for it to be overseen by a NUIC operator.
-
9.84 We were asked who would “use” a vehicle for this purpose. 467In this context “user” clearly does not include mere passengers. We would expect the courts to interpret “use” to include the keeper or owner and those acting on their behalf. It would also apply to a person who causes a vehicle to undertake a journey, including someone who takes the vehicle without consent. However, the term is a flexible one, and the courts would have scope to interpret it to address new mischiefs as they arise.
-
9.85 We have considered whether an exemption should be available for trials. The new offence would make it unlawful to run a trial on roads or other public places without a safety driver, either in the vehicle or in a remote location. We have reached the conclusion that running trials on public roads without any form of safety driver would not be in the interests of safety. Responses to Consultation Paper 3 made it clear that experimenting with public safety is not an option. 468ABI/Thatcham said:
Vehicles permitted for use on UK roads, no matter the volumes, should meet UK safety assurance (UKSA). Only once vehicles are deemed to be compliant with regulation and UKSA should vehicles be then released for testing on UK roads. Trials should take place as part of the testing phase - i.e. not on public roads. Once the UKSA has been attained, then the vehicles should be deployed for further real-world testing.
-
9.86 Where developers wish to trial NUIC technology without a safety driver in the vehicle, it is perfectly possible to run the trial with a remote driver, who would monitor the vehicle at all times and intervene where necessary. We think this will allow innovation while preserving safety.
Recommendation 50.
-
(1) it is equipped with an ADS feature authorised for use with no user-in-charge in that operational design domain; and
-
(2) arrangements are in place for the vehicle to be overseen by a licensed NUIC operator.
RECOMMENDATION: REQUIREMENTS FOR BEING A NUIC OPERATOR
-
(1) be of good repute;
-
(2) have appropriate financial standing;
-
(3) have an effective and stable establishment in Great Britain; and
-
(4) be professionally competent.
Good repute
-
9.90 In Chapter 5 we recommend that this requirement should also apply to an ADSE. We explain that the requirement of good repute has been interpreted extensively in the context of Public Service Vehicle (PSV) and Heavy Goods Vehicle (HGV) licensing. Applicants should not have been convicted of serious or relevant criminal offences.470 Case law also states that good repute might be undermined by “fronting”. 471This is where an entity without a licence uses another entity’s licence to conceal that they are behaving in a way that requires them to have one of their own. The Upper Tribunal has also held that the use of “Phoenix” arrangements to avoid previous liabilities may amount to “unacceptable business practice” which is inconsistent with good repute.472 However, without evidence of malpractice, a history of involvement with dissolved companies will not itself breach the requirement for good repute.473
-
9.91 Good repute is a well-established concept within transport licensing. However, to give this requirement more substance, we recommend that the Secretary of State should be given a power to specify by regulations what amounts to good repute for the purposes of NUIC operator licences.
Financial standing
-
9.92 Financial standing is required to ensure that NUIC operators can maintain vehicles and control centres and respond to regulatory sanctions. The required level of financial standing will need to be set by Government and should be sufficient to ensure that the company can respond to regulators’ demands to make improvements and pay penalties. However, the rules should allow financial standing to be demonstrated in a variety of ways, including through insurance. 474The amount should be proportionate to the risk. It should therefore be lower for smaller companies with fewer vehicles or which operate in more restricted environments (such as dedicated low-speed routes).
An establishment in Great Britain
-
9.93 Both the PSV and HGV operator licensing schemes require the operator to have “an effective and stable establishment in Great Britain”.475 The requirement is interpreted in accordance with a retained EU Regulation. 476Among other things, the applicant must have an establishment in the jurisdiction at which it keeps its core business documents, including documents relating to accounting, personnel management, driving time and rest data. 477The applicant must also conduct its vehicle operations effectively and continuously, with the necessary administrative and technical equipment, at an operating centre situated in Great Britain.478
-
9.94 We recommend that a NUIC operator conducts its operations (with the necessary administrative and technical equipment) at an operating centre within Great Britain. As we discuss below, the regulator will need to be able to inspect the centre and enforce the terms of the licence. In some circumstances, the NUIC operator may also face criminal prosecution. It would be extremely difficult to ensure accountability or effective enforcement if operation centres were to be overseas.
-
9.95 Again, we think it would be helpful for the Secretary of State to have power to make regulations to specify what amounts to operating in Great Britain.
Demonstrating professional competence
-
9.96 NUIC operators will also need to demonstrate professional competence. We have evolved our thinking on how this can best be done.
-
9.97 In Consultation Paper 2 we were influenced by PSV licensing, where every PSV operator must have a transport manager who is of good repute and professionally competent. Most transport managers demonstrate professional competence by passing a written examination. Yet in the early days of AV operation there will be no specific exams for AVs. We asked how professional competence could be demonstrated.
-
9.98 In response, several consultees thought that the new challenges of AVs meant that we should move away from the idea that the necessary skills will reside in a single qualified individual. Instead, organisations should demonstrate competence through a safety management system. In Consultation Paper 3, we sought views.479
The case in favour of a safety management system
-
9.99 Most respondents agreed that NUIC operators should demonstrate professional competence through a safety management system. 480The SMMT thought this would “avoid stifling innovation” and the Bar Council described the approach as flexible enough to accommodate a wide range of use cases.
-
9.100 Several consultees commented on how this might work. CertiCAV thought that the safety management system should “define individual roles with clear responsibilities and competence requirements”. HORIBA MIRA said that operators would need to demonstrate the implementation of professional processes, so that approval might look “more similar to an ISO 9001 certification than a transport managers' exam”.
-
9.101 KPMG said that NUIC operators should be required to provide evidence of “operational management processes, including incident management and routine maintenance, as well as governance and reporting”. As part of this, they suggested that all individuals involved in operations would need to undergo a qualification process, including “an assessment of adequate knowledge of rules and regulations”.
Conclusion: a safety management system
-
9.102 A safety management system now forms part of our recommendations. To be licensed as a NUIC operator, an organisation must document its system of safety management, defining individual roles with clear responsibilities and competence requirements. This should cover individual staff, supervisors and senior managers, and include details of how safety concerns are to be escalated and addressed in the organisation.
Recommendation 51.
-
(1) is of good repute;
-
(2) has appropriate financial standing;
-
(3) conducts its operation from one or more centres within Great Britain; and
-
(4) is professionally competent to run the service.
Recommendation 52.
Recommendation 53.
RECOMMENDATION: SUBMITTING A SAFETY CASE
A potential NUIC operator must submit a safety case
-
9.106 Under our scheme, the onus will be on the NUIC operator to demonstrate how safety will be assured, setting out the detail in a safety case. As we have discussed, where the ASDE and NUIC operator are the same entity, they would submit a combined safety case, looking at all aspects of safety. In other cases, the ASDE will need to specify how its NUIC features can be operated safely. The applicant for a NUIC operator’s licence must then show how it will meet these specifications.
-
9.107 We would expect the safety case to show how assistance will be provided to vehicles; how incidents will be managed; and how data will be recorded and stored. Where appropriate, we would also expect details of how vehicles will be updated and maintained in accordance with ASDE specifications. The NUIC operator will not necessarily be required to carry out all these tasks themselves. However, when work is subcontracted, the NUIC operator will need to show how the quality of subcontractors’ work will be monitored.
-
9.108 As discussed, our scheme does not cover “pure” remote driving, without any element of self-driving. However, if a NUIC operator relies on some element of remote driving to ensure safety, it will need to specify this in its safety case and explain how it will be conducted safely.
-
9.109 The safety case is a key document. Regulators will need to be able to rely on the accuracy and completeness of the information provided. In Chapter 11 we recommend new criminal offences where an ASDE or NUIC operator misrepresents or fails to disclosure safety relevant information in its safety case.
Recommendation 54.
-
9.110 To obtain a NUIC operator licence, the applicant should submit a safety case, showing how safety will be assured. Among other things, the applicant’s safety case should set out:
-
(1) how oversight will be provided to vehicles, including suitable connectivity, equipment, staff training and rest breaks;
-
(2) incident management, including communication with passengers, road users and the emergency services, together with measures to remove vehicles causing an obstruction;
-
(3) systems, expertise and equipment to maintain vehicles, install updates and ensure cybersecurity;
-
(4) data management;
-
(5) whether safety relies on any element of remote driving, and (if so) how this will be done safely; and
-
(6) ways to learn from mistakes, including links with local authorities, highway authorities and the police.
Where an ASDE and the NUIC operator are the same entity, the entity may submit a joint safety case covering both roles, to be assessed by the authorisation authority.
In other cases, the safety case should address the ASDE’s written specifications for what must be done to ensure safe operation.
RECOMMENDATION: SETTING LICENCE CONDITIONS
-
9.111 Our recommendations are designed to be sufficiently flexible to cover different models of NUIC operation. NUIC operators would not all be subject to a single list of responsibilities. Instead, after considering the safety case, the regulator should decide what responsibilities should apply. The responsibilities would then be set out in the conditions of the licence. These will depend on the use case but may include duties:
-
(1) to insure the vehicle;
-
(2) to maintain the vehicle (including software updates and cyber-security);
-
(3) to check that any load is safe and secure before that journey starts, and ensure that the number of passengers does not overload the vehicle;
-
(4) following an incident, to provide information to other road users, the police and the regulator;
-
(5) not to impede traffic flow, by (for example) ensuring that vehicles are not left in inappropriate places; and
-
(6) to check the route and pay any tolls and charges.
9.112 As discussed, the list of duties may be less onerous for limited uses, such as a public car park offering valet parking.
9.113 As we discuss in Chapter 10, we also envisage a requirement that the NUIC operator does not conduct passenger services without an interim passenger permit. We set out our recommendations for interim passenger permits in the next chapter.
Recommendation 55.
9.114 When granting a licence, the regulator should specify the responsibilities which fall on the NUIC operator in the terms of the licence.
RECOMMENDATION: POWERS OF THE REGULATOR
Regulatory sanctions
9.115 Under our recommended scheme, a breach of the licence conditions will be enforced through a system of regulatory sanctions by the in-use regulator. We would expect that the police, vehicle examiners and the public would bring complaints to the attention of the regulator, who would then investigate. If the regulator established that the licence conditions had been broken, it would then have a broad range of sanctions available to it.
-
9.116 In Chapter 6 we recommended that ASDEs should be subject to a range of sanctions, including civil penalties, redress orders, compliance orders and (in the most serious cases) suspension or withdrawal of authorisation. We recommend the same penalties in respect of NUIC operators.
Sanctions where the ASDE and NUIC operator roles are combined
-
9.117 As discussed, we anticipate that initially it will be common for a single organisation to act as both an ASDE and a NUIC operator. It is important that the regulator can impose sanctions on the combined ASDE/NUIC operator organisation, without having to establish in which role it was responsible for the fault. It may be a combination of both: a problem with the ADS may be exacerbated by poor operation. It is therefore important to our scheme that the same sanctions are available for both roles.
-
9.118 This will be especially important where the in-use regulator issues a compliance order. In Chapter 6, Recommendation 27, we recommend that for technical issues, these should be outcome-oriented: they should specify the result to be achieved, rather than the means for doing so. In some cases, the combined ASDE/NUIC operator may be able achieve the outcome either through changes to the vehicle, or changes to its operations. If, for example, the complaint is that vehicles are failing to respond appropriately to the presence of emergency vehicles, this might be resolved through improvements to the ADS or by improved advice from a remote assistant, or a combination of both. Under our recommendations, the in-use regulator would have power to issue a compliance order specifying the outcome to be achieved to the combined ASDE/NUIC operator, without distinguishing between the two roles.
Sanctions where the NUIC operator is a separate entity
Recommendation 56.
-
(1) informal and formal warnings;
-
(2) civil penalties;
-
(3) redress orders;
-
(4) compliance orders;
-
(5) suspension of licence;
-
(6) withdrawal of licence; and
-
(7) recommendation of attendance at a restorative conference.
Power to request information
-
9.121 In Chapter 6 we recommend that the in-use regulator should be under a statutory duty to devise measures to compare the safety of automated and conventional vehicles. This may include both “leading measures” (in the absence of actual damage) and “lagging measures” (including injuries).481
-
9.122 The relevant data may be held by either an ASDE or a NUIC operator. Under our scheme, the in-use regulator would have powers to require information from both entities. Powers to require information are common in other jurisdictions. 482We think they are essential for scrutinising safety on an on-going basis and comparing NUIC vehicles with conventional driving. Information is also needed for continued compliance with regulatory requirements, such as financial standing.
Recommendation 57.
Inspection powers
-
9.124 In Chapter 6 we recommend that the ASDE in-use regulator should have the power to apply for a search warrant to obtain information which is relevant to the investigation. Those powers would also be relevant if this context.
-
9.125 The NUIC operator licensing regulator should also have power to enter and inspect a remote operations centre. This will be an important tool to see that the system outlined in an operator’s safety case is being followed in practice. It is common for other regulators to have inspection powers. For example, the Traffic Commissioners, vehicle examiners and the police have powers to inspect an HGV operator’s maintenance facilities and seize relevant documents.483
Recommendation 58.
HOW LONG SHOULD A NUIC OPERATOR LICENCE LAST?
-
9.127 In Chapter 5 we recommend a new scheme to authorise vehicles as self-driving. Once a vehicle is granted authorisation, that authorisation is not time limited. It will continue until a decision is made to suspend or withdraw the authorisation. Once a vehicle has been put on the market, and in the absence of harm, buyers need to be able to rely on the vehicle’s continued authorisation.
-
9.128 The same does not apply to NUIC operations, which continue on a day-to-day basis. Some existing road transport operator licences are of indefinite duration while others are time limited. PSV operator licences continue in force indefinitely,484 though operators must confirm their details every five years.485 Private hire operator licences last for five years in England and Wales and three years in Scotland, or such shorter period as the licensing authority may decide.486
-
9.129 As discussed, there is much we do not know about NUIC operation: licence conditions may therefore need to change in the light of experience. This would suggest a relatively short licence. On the other hand, NUIC operators will need some certainty that once they have made an investment and set up a service, they will have the opportunity to run that service for a reasonable time before regulatory demands change.
-
9.130 To balance these two competing objectives, we recommend that the duration of a NUIC operator licence should be set in secondary rather than primary legislation. Initially a licence should last for five years.
Recommendation 59.
Initially, the duration should be five years.
THE ROLE OF CRIMINAL OFFENCES AND TRAFFIC MANAGEMENT PENALTIES
-
9.132 In Chapter 8 we explain that a user-in-charge will have some but not all of the legal liabilities of a driver. A user-in-charge is given a statutory immunity against any offences which arise out of the dynamic driving task but has other driver responsibilities.
-
9.133 A NUIC operator is not a driver and we do not think that a court would regard it as a driver for the purpose of offences framed in respect of driving. Therefore, a NUIC operator does not require a specific immunity. However, some offences do not fall on drivers but on users. For example, the main offences of failing to carry insurance 487or using a vehicle in a dangerous condition 488are committed by a person who uses the vehicle. These may apply to a NUIC operator.
-
9.134 The term “use” is widely used in road traffic provisions. In Background Paper A we look at how it has been interpreted. In practice, “using a vehicle” has been construed relatively narrowly. The phrase has been held to cover:
-
(1) the driver;
-
(2) the driver’s employer, while it is being used on the employer’s business;489
-
(3) a person engaged in a criminal joint enterprise with the driver;490
-
(4) an owner who is “using the vehicle directly for their own purposes” while being driven by an uninsured driver; 491 and
-
(5) an owner of a vehicle abandoned on a road or public place.492
-
9.135 The courts have interpreted the phrase “using a vehicle” to address the mischief at which the offence is aimed.493 Courts have sometimes differed over how wide the interpretation should be.494 However, in R&S Pilling (t/a Phoenix Engineering) v UK Insurance Ltd, 495Lord Hodge noted “the good sense of having a broad interpretation of ‘use’”.496
-
9.136 How far the “use” offences fall on a NUIC operator will depend on the circumstances. If a NUIC operator is an owner using the vehicle directly for their own purpose, the courts are likely to classify them as users. The recent case law shows that the courts will take a purposive approach, to address the mischief involved.
-
9.137 Other offences and civil penalties fall on the owner or registered keeper. For example, under section 144A of the Road Traffic Act 1988, it is an offence for a registered keeper to keep a vehicle which does not meet the insurance requirements. If the NUIC operator is the registered keeper of an uninsured vehicle, they would be liable for this offence. Similarly, the registered keeper may be liable to pay parking tickets.497
-
9.138 We do not intend to amend the way that motoring offences would apply to NUIC operators. Some NUIC operators may be liable for some offences, depending on whether the operator is the registered keeper or owner. However, the criminal law is not designed with NUIC operators in mind. There would be gaps if we were to rely on criminal sanctions alone. Therefore, breaches of licensing conditions should be enforced by regulatory sanctions.
9.139 It may be helpful to give an example of how we see the two means of enforcement working together. For minor parking tickets, where the NUIC operator is also the registered keeper, we would expect the NUIC operator to receive and pay the ticket, in the same way as a user-in-charge. However, we would anticipate that it would be a licensing condition that NUIC operations should not disrupt traffic flow. In the event of systemic parking breaches, leading to complaints of congestion, the issue would be referred to the NUIC regulator, who would have powers to issue a compliance order. Further breaches could lead to redress orders or higher civil penalties.
WHO SHOULD ADMINISTER NUIC OPERATOR LICENSING?
9.140 We have considered which organisation should grant the NUIC operator licence. In Consultation Paper 3, we suggested two possible agencies: the Traffic Commissioners or the in-use regulator which administers the safety assurance scheme. 498We noted that the Traffic Commissioners could draw on their experience of administering the PSV and goods vehicle operator licensing schemes. On the other hand, the in-use safety assurance regulator would be well-placed to develop expertise in the challenges of automated driving. We welcomed observations.
Consultees’ views
9.141 Our question generated a mixed response. Of the 50 respondents who answered this question, 17 thought that the Traffic Commissioners were best placed to administer the scheme, at least in the first years of deployment.499 Two arguments were put in favour of the Traffic Commissioners. The first is that PSV and HGV Operators would only have to deal with one body, not two. The second is that the Traffic Commissioners could draw on their existing expertise and practices.
9.142 Some respondents thought that the in-use safety assurance regulator should administer NUIC operator licensing. Wayve preferred this option because they questioned whether the Traffic Commissioners would have the “deep technical capability” necessary to “assure technical operation and safety, rather than transport operation”. A handful of respondents suggested that the two entities could collaborate or assist each other in administering the scheme.
9.143 Some respondents suggested that the scheme should be administered by the Driver and Vehicle Standards Agency (DVSA);500 the Driver and Vehicle Licensing Agency (DVLA);501 or the Department for Transport (DfT) more generally.502
Conclusion
9.144 In practice, collaboration between the various DfT agencies is common. For example, the Traffic Commissioners do not employ staff directly, but instead delegate their functions to named employees of the DVSA, which provides them with administrative support and personnel.503 We would expect continued flexibility about how agencies are organised and staffed. We therefore recommend that legislation places responsibility for operator licensing on the Secretary of State for Transport, with a power to allocate responsibilities flexibly.
9.145 If, as we suspect, the first NUIC vehicles are operated by combined ASDE/NUIC operator organisations, it is likely that expertise in assessing the safety case will be developed by the authorisation agency, while expertise in enforcement issues will lie with the in-use regulator. To use this expertise to best effect, the Secretary of State may wish to allocate responsibility for granting licences and enforcing licensing conditions to these two existing agencies.
9.146 In time, as use of NUIC vehicles grows, the process of granting licences may become more routine and less dependent on technical expertise. In the long term, we can see advantages to streamlining NUIC operator licensing with other licensing schemes, such as those applying to PSVs and HGVs.
Recommendation 60.
9.147 The new Act should place responsibility for NUIC operator licensing on the Secretary of State for Transport.
ISSUES NOT ADDRESSED IN THIS REPORT
Tier 2 duties for freight services
9.148 The next chapter (Chapter 10) considers additional “Tier 2 duties” where NUIC vehicles carry passengers. There would also be a need for Tier 2 duties for freight (and potentially other niche use cases). However, we have not consulted on freight specifically during our review. The implications of automating the process of loading vehicles and coupling and uncoupling trailers, and broader impacts require separate analysis and consultation.
Remote driving
-
9.149 At present, there is no specific regulation of remote driving. Our understanding is that it is legal, provided the driver holds a licence, is fit to drive and is in a position to have “proper control of the vehicle” and “a full view of the road and traffic ahead”. 504It is even legal to drive remotely from outside the jurisdiction, leading to problems of accountability and enforcement.
-
9.150 Our scheme does not cover “pure” remote driving, without any element of self-driving. This is a potential gap. Ensuring connectivity, suitable equipment, training and rest breaks becomes even more important for remote driving than for self-driving. Although the matter is outside our terms of reference, we would urge the Department for Transport to consider how far the NUIC operator licensing scheme would also be suitable for remote driving.
-
Chapter 10: NUIC Passenger Services
-
10.1 At present, road passenger services are subject to additional layers of regulation. In Consultation Paper 2 we considered the regulatory schemes that apply to taxis, private hire and public service vehicles (PSVs),508 and the additional regulation of bus services.509 These schemes are aimed at protecting passengers and integrating services within the broader transport network. They also impose accessibility requirements on service providers.510
-
10.2 In Chapter 8 we noted that where passenger services are provided in AVs with a userin-charge, these additional layers of regulation continue to be fit for purpose. Current requirements (such as those for disability awareness training and safeguarding) would attach to the user-in-charge, in the same way they attach to a driver. No fundamental shift is required because a qualified person remains in the vehicle.
-
10.3 However, where AV passenger services are provided without a user-in-charge, a different approach is needed. In this chapter, we consider the regulation of passenger services provided by NUIC vehicles (that is, by vehicles equipped with features authorised for use with no user-in-charge). In Chapter 9 we explained that all NUIC vehicles would need to be overseen by a licensed NUIC operator. We described a common core of obligations that such operators would be subject to; referred to as “Tier 1” safety duties. In this chapter we consider how to regulate for additional “Tier 2” duties when a NUIC vehicle is used to provide passenger services.
-
10.4 As we explain below, there is much that is not known about how passenger services will operate in the absence of a driver. The immediate need is to collect more evidence and gain more experience, particularly on issues such as accessibility and safeguarding. We therefore recommend a procedure to issue “interim passenger permits” before designing a permanent regulatory scheme.
THE CURRENT LAW
-
10.5 Current taxi, private hire and PSV legislation assumes a human driver. Attempting to apply the legislation to services without a driver leads to complexities and ambiguities. A vehicle without a driver may not fall within the definition of a private hire vehicle (in England and Wales)511 or a private hire car (in Scotland).512 As for taxis, the definition of a taxi in England and Wales (including London) does not expressly refer to a driver, while in Scotland it does.513 The entire regime of taxi licensing is heavily reliant on
-
508 CP2, Ch 3. Broadly speaking, a PSV is usually a motor vehicle that carries more than 8 passengers.
-
509 CP2, Ch 8.
-
510 Under s 29 of the Equality Act 2010. See CP2, paras 6.20 to 6.41 for discussion of the accessibility requirements imposed on service providers.
-
511 Local Government (Miscellaneous Provisions) Act 1976, s 80(1); Private Hire Vehicles (London) Act 1998, s 1(1)(a).
-
512 Civic Government (Scotland) Act 1982, s 23(1).
-
513 Above.
driver obligations and it is unclear how these could apply in the context of a NUIC vehicle.
-
10.6 Whether a NUIC vehicle carrying passengers requires a PSV licence is complicated. Section 12(1) of the Public Passenger Vehicles Act 1981 suggests that it does. It states that “a public service vehicle shall not be used on a road for carrying passengers for hire or reward except under a PSV operator’s licence”. However, the offence in section 12(5) can only be committed by the “operator”, who in turn is defined as the driver or the person for whom the driver works.505
-
10.7 There are many other uncertainties. For example, PSV legislation applies if the service is for “hire or reward”. 506Does this cover a service which carries members of the public but does not charge fares, perhaps making its revenue through advertising instead? 507Similarly, only licensed taxis can accept bookings in a public place “there and then”508 (in Scotland) or “ply for hire” (in England and Wales). 509Does a pod waiting to pick up passengers at a train station which can be booked instantly online need a taxi licence? We discuss these complexities in Background Paper B, which analyses how existing passenger service licensing could apply to NUIC vehicles.
-
10.8 Without some changes to the existing law, passenger services may either be banned510 or entirely unregulated.511 Where there is no “driver” it could be argued that the service does not require licensing at all. That argument is strongest in respect of private hire services across Great Britain; and taxi services in Scotland. There is a risk that a determined operator might exploit legal gaps to run an entirely unlicensed service. Automated passenger services could emerge as unregulated competitors to private hire, as happened when private hire emerged as competition to taxis before the introduction of private hire regulation.
-
10.9 Alternatively, some operators may be deterred from offering passenger services at all, for fear these services would require licences which demand requirements that the operator cannot meet. This would be particularly acute for services which receive bookings “there and then” or could be said to “ply for hire”.
THE CHALLENGES OF RUNNING PASSENGER SERVICES WITHOUT A DRIVER
-
10.10 There is much that is not currently known about how automated passenger services will work in the absence of a human driver. Below we consider some of the challenges posed by safeguarding, accessibility, boarding and congestion.
Safeguarding
-
10.11 In Consultation Paper 2 we proposed that Highly Automated Road Passenger Services (HARPS) operators should take reasonable steps to safeguard passengers from assaults, abuse, and harassment by others using the service. We thought that safeguarding would be required for public acceptance and to allay fears of being alone in an enclosed space with a stranger.
-
10.12 The issue divided opinions. While some respondents saw safeguarding as crucial, others thought that operators should not be held responsible for assaults by other passengers. 512The responses showed that there are still many difficulties in how to protect passengers in a shared space without a driver present. While CCTV recordings now appear to be accepted in public transport settings, many consultees did not consider that CCTV would be sufficient to replace a human presence. 513There were also privacy concerns about audio recordings, especially in apparently private spaces.514
-
10.13 We think it is important that operators take steps to ensure the safety of women, young people and other vulnerable passengers. However, more evidence is needed about how this can best be done.
Accessibility
-
10.14 At present, disabled people travel less than the rest of the population. 515When they do travel, they are more dependent on taxis and private hire.516 The cost of these trips is a particular burden for those on low incomes.
-
10.15 Older and disabled persons are among those with the most to gain from AVs, especially if services can be made more affordable. However, many people currently rely on a human driver. An older person with mobility problems may rely on a driver to accompany them from their door and help them into the vehicle. An anxious person may rely on a human driver for reassurance.
-
10.16 In Consultation Paper 2, we looked in detail at each stage of the journey, to see how accessibility standards could be embedded into the framework. Responses to consultation reflected strong consensus for the need to develop national minimum standards of accessibility for automated passenger services. 517Many referred to the importance of co-design, whereby people representing a diverse range of impairments work alongside designers. 518We do not know the answers to many of the questions about how automated services can be made accessible, but with co-design we think that answers could be found. Without co-design, there is a risk of designing out those sections of society who could benefit the most.
Boarding and alighting
-
10.17 In railway automation, door operation has proved to be particularly intractable. It is only at the highest level of automation (GOA4) that routine door operations are automated. The Docklands Light Railway (GOA3), for example, continues to employ onboard attendants to operate the doors.
-
10.18 Even with drivers, a relatively high proportion of rail injuries take place at the platform/train interface.519 The clearest solution is to install platform screen doors, as used in many underground systems, including the London Jubilee line. Such “double door” systems are common in other fully automated services, such as lifts.
-
10.19 We do not yet know how safe the doors of busy buses will be in the absence of human operation. Responses to Consultation Paper 2 indicated that a range of different approaches would be needed, as part of vehicle design, infrastructure and service arrangements (including staffing). Further, the appropriate range of approaches would differ depending on the kind of service being offered.
Controlling congestion
-
10.20 One fear is that large numbers of new automated hire vehicles might be placed on urban roads, adding to congestion and pollution. The problem would be compounded if services “cruise empty” - that is, circle around empty for no purpose, except to wait for their next fare.
-
10.21 Controlling congestion has been one of the aims of taxi regulation since the 17th century.520 Local licensing authorities outside London have powers to control the number of taxis. Scottish authorities can control private hire car numbers as well. However, these powers are controversial and can reduce the availability of services for some vulnerable groups.521
-
10.22 In Consultation Paper 2, we looked at a variety of regulatory tools to prevent congestion. Our favoured approach was road pricing. We thought that automated services could lead the way, allowing more innovative schemes based on improved data. We envisaged that HARPS would pay a price per mile travelled, with the possibility of different mileage rates depending on the roads, occupancy and time of day. There is also the possibility of dynamic pricing, where charges vary depending on the level of congestion at a given time.
-
10.23 Many consultees welcomed renewed debate about road pricing to meet the challenges of improving air quality and reducing congestion, while replacing fuel duty. There was also considerable interest in the opportunities provided by new technology for more sensitive road pricing systems. However, many consultees thought that road pricing raises issues which extend far beyond HARPS, including how to approach road taxation in the post-fossil fuel world. We do not feel able to make any recommendations on this issue at this time, in the absence of a more general Government strategy on the replacement for fuel duty.
PASSENGER SERVICES IN OTHER JURISDICTIONS
-
10.24 We have considered the approach taken in other jurisdictions. Israel has put the emphasis on trials. Its Bill to enable experiments in AV use would allow trials with paying passengers in automated vehicles to obtain permits initially lasting up to three years. 522The relevant regulator can extend the validity of the operating permit for an additional three years at a time, as long as such an extension can be justified. Such trials are however not exempted from licensing requirements for paid driving and taxi licensing.523
-
10.25 Reforms in Germany524 and France,525 together with those led by the European Commission 526have so far focussed on the technical safety of the passenger service (equivalent to our ASDE and NUIC operator licensing provisions). There is less discussion of how the NUIC vehicle should be licensed in relation to taxi, private hire or public service vehicle legislation. However, both the French527 and German 528laws give significant weight to local decision-making alongside centralised powers.
AN INTERIM PERMIT PROCEDURE FOR NUIC PASSENGER SERVICES
The need for more evidence
-
10.26 We think it is premature to establish a permanent regulatory scheme for NUIC passenger services beyond Tier 1 safety duties. There is much that is not known about how to safeguard passengers, provide accessible services and control congestion. Our current approach is to encourage operators to gather evidence about many different passenger services. One aim would be to show how innovative services can meet the changing transport needs of society, as we reduce carbon emissions and emerge from the COVID-19 pandemic with different patterns of travel for work, shopping and leisure.
-
10.27 At present, the uncertainty and complexity of the current law have the potential to slow down and deter passenger service development. Our analysis of existing passenger services legislation highlights two key risks. First, a determined operator might exploit legal gaps to run an entirely unlicensed service. Second, some operators may be deterred from running passenger services, fearing these would require licences they are unable to obtain. There is also a third risk, which arises from the current rules on services which cross licensing authority boundaries (referred to as “cross-border working”). 529In England and Wales there are currently 316 licensing authorities.530 One of these authorities might impose particularly low standards and provide a licence which allows the vehicle to operate elsewhere.531
-
10.28 We therefore recommend a new interim passenger permit to introduce a clear, lawful route for providing passenger services in NUIC vehicles. The interim permit procedure would allow initial services to be provided, so as to collect evidence about how to meet the challenges we have outlined. In the light of this experience, further regulatory standards should be developed to ensure accessible, locally accountable service provision.
Devolution
-
10.29 PSV operator licensing is reserved to the UK Parliament, so any exemption from PSV legislation could be introduced by Westminster. 532However, taxi, private hire and bus regulation is devolved to the Scottish Parliament and to the Senedd. Therefore, any new legislation on how these regulations interact with NUIC vehicles would either need a legislative consent motion,533 or to be passed separately by the Scottish Parliament or the Senedd.
-
10.30 Here we recommend similar legislative provisions for England, Scotland and Wales. However, under our scheme, discretionary decisions about how those provisions should be applied would be made by ministers in the relevant government.
A new procedure to grant interim passenger permits
-
10.31 We recommend that the Secretary of State for Transport, the Scottish Ministers and the Welsh Ministers should have the power to grant interim permits to providers of passenger services using NUIC vehicles. Permit-holders would not be subject to the obligations imposed by taxi, private hire and PSV legislation, provided they abide by the conditions of the permit.
Charging fares
-
10.32 In our view, the permit should be available whether or not passengers are charged fares. This approach maximises the amount of “real world” data to be collected (including data on price points and how to deal with fare evaders). It also enables longer, commercially viable service provision while gathering data. Excluding fare payment could also hamper innovation by disproportionately disadvantaging smaller companies and start-ups with less capital.
-
10.33 The permit is, however, designed to be “interim”. It should be aimed at increasing understanding of how to provide passenger services on a more permanent basis. The permit should therefore be of specified duration: we suggest a maximum of 3 years. There should be no automatic right of renewal. Upon expiry of the permit, the relevant Minister should consider whether an interim permit would still benefit the public transport network.
Would vehicles need to be authorised?
-
10.34 Interim passenger permits would be available whenever the service is designed to run without a driver or user-in-charge. We would expect that in most cases the service would use vehicles already authorised as having self-driving NUIC features and that are overseen by NUIC operators (as recommended in Chapter 9). However, we think it would be helpful to also allow for the possibility that interim passenger permits could be used to carry passengers during trials, before authorisation has been obtained.
-
10.35 If the passenger service is combined with a trial of the technology in an unauthorised vehicle, a safety driver would be required. Under our scheme, the presence of a safety driver would not prevent the operator from applying for an interim passenger permit.
The key question is not whether the service has a driver (for now). Instead, the question relates to how the service is designed to operate in the long-term. Is the service designed to operate in a NUIC vehicle without a driver or user-in-charge?
Accessibility
-
10.36 In our view, every service provided under an interim passenger permit should aim to improve understanding of accessibility issues. As a condition of the permit, the service provider should collect information about how to make services accessible for older and disabled passengers, based on principles of co-design. To ensure that accessibility is entrenched into NUIC passenger services, we recommend that a new statutory accessibility advisory panel should be established. This recommendation is discussed further below.534
-
10.37 Under our recommendations, before a permit is granted, the application must be assessed by the accessibility advisory panel. The panel would need to agree that the service is likely to add to knowledge about how to provide automated services for older and disabled passengers, and that it involves people with disabilities in its design.
An obligation to publish information on safeguarding and accessibility
-
10.38 The primary aim of allowing an interim passenger permit is to gather information about how to regulate services in the future, particularly as regards safeguarding and accessibility. We therefore recommend that each year, the permit holder should publish a report on the operation of the service, highlighting how the service safeguarded passengers and how it met the needs of older and disabled passengers.
Taxi and private-hire type services: the need for consent
-
10.39 It is important that the interim permit procedure is not used to undermine local decision making. Therefore, if the service resembles a taxi or private hire service (and would require a taxi or private hire licence if it had a driver) the local licensing authority would need to give consent.
-
10.40 The application would need consent from every licensing authority area in which it operates. This addresses the current problem of “cross-border working”, where one licensing authority imposes very low standards and issues licences which allow vehicles to operate in other licensing areas. Under our scheme, where a passenger service crosses licensing authority boundaries, each licensing authority would need to give consent.
-
10.41 We envisage that, in practice, the service provider would approach one or more local licensing authorities to discuss how the service would run. This should include discussion of safeguarding considerations. The provider would then submit an application to the relevant minister having already obtained the consent of a local authority.
NUIC passenger services and bus service regulation
The current law
-
10.42 Currently, where a PSV is used to provide “a local bus service”,535 additional regulations apply. We described these in detail in Consultation Paper 2.536 The main division is between local authorities which operate a franchised system and those with a de-regulated market.
-
10.43 Under a franchised system, a public body sets details of routes, fares and service levels. It also retains the fare income. The right to run the service is contracted out to private companies on a tendered basis. No other provider is allowed to run a bus service in competition with the franchised network without a specific permit.
-
10.44 At the time of writing, only London has a franchised bus network. In London, any bus service outside the franchised network requires a London Bus Permit, issued by Transport for London. However, franchised networks may now be established in other areas, using powers introduced in the Bus Services Act 2017 (in England) and the Transport (Scotland) Act 2019. 537Transport for Greater Manchester is in the course of establishing a franchised network, with the first franchised services scheduled for 2023.
-
10.45 Elsewhere, bus services depend on private operators. It is relatively easy for a private operator to decide to run a new service. The main obligation is to inform the local authority and register the service with the Traffic Commissioners.538 The Traffic Commissioners have power to impose penalties on operators that breach punctuality requirements.539
-
10.46 Local transport authorities have also established partnership schemes with bus operators. In return for providing bus facilities, local authorities may impose conditions, particularly to promote multi-operator tickets and the use of smart cards.540
Our recommendations
-
10.47 Under our recommendations, additional requirements would apply where the provider wishes to supply a “bus-like service”: that is, one which would be considered as a “local bus service” if provided in a conventional vehicle with a driver.541
-
10.48 In Consultation Paper 2, we looked in detail at the definition of a local bus service. Essentially a local bus service uses a PSV for the carriage of passengers by road at separate fares. 542It must allow passengers to alight within 15 miles of where they boarded (measured in a straight line). Exceptions apply (for example) to group arrangements, school buses, rail replacement bus services and excursions. Under our scheme, a “bus like” NUIC service would be one which can transport more than eight passengers at a time; charges separate fares; allows passengers to alight within 15 miles; and which does not fall within an existing exemption.543
-
10.49 For “bus-like” services, the operator would need to consult the local transport authority. In areas with franchised networks, the local transport authority would need to give consent. In other areas, ministers could grant an interim passenger permit subject to conditions. These could include requirements that service details be notified to the Traffic Commissioners; and that the service participate in ticketing schemes.
-
10.50 If the service breaches punctuality requirements, we do not recommend that the operator should be subject to penalties. Interim passenger permits may be used for experiments, to find out if NUIC services will run on time in the absence of drivers to manage passengers. However, in the case of flagrant breaches of punctuality, the permit may be withdrawn.
Consultation with road authorities and the emergency services
-
10.51 The trial organisation would also need to show that it had consulted with relevant highway or road authorities and the emergency services. In deciding whether to grant a permit, the Secretary of State, Scottish Minister or Welsh Minister should take into account the views of the affected highway authorities and the emergency services.
-
10.52 Again, the permit may be made subject to conditions to meet the concerns raised. Conditions could be designed to improve safety, the environment or traffic flow; to safeguard passengers; and to provide clear and comparable information on fares (if charged). The conditions could restrict services to a particular number of vehicles, a specified area or even a specified time of day.
-
10.53 The figure on the following page sets out the requirements for the interim passenger permit:
Interim Passenger Permit
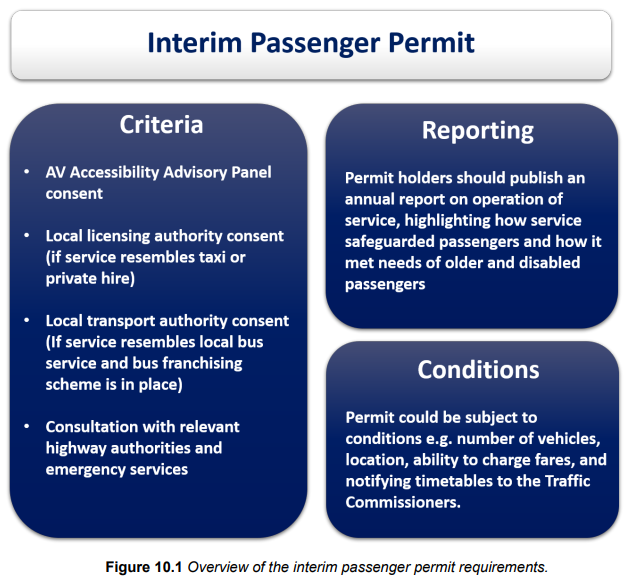
Permit could be subject to conditions e.g. number of vehicles, location, ability to charge fares, and notifying timetables to the Traffic Commissioners.
Recommendation 61.
-
(a) in the opinion of the accessibility advisory panel (recommendation 63), the service is likely to add to knowledge of how to provide automated services for older and disabled passengers by involving them in the service’s design;
-
(b) consultation has taken place with relevant highway or road authorities and the emergency services; and
-
(c) any necessary consents from the licensing authority or the local
transport authority have been obtained.
scheme.
-
(4) Each year, the permit holder should publish a report on the operation of the service, highlighting how the service safeguarded passengers and how it met the needs of older and disabled passengers.
-
(5) There should be power to make the permit subject to conditions. These may (among other things) specify the number of vehicles to be used; the geographic location in which it takes place; the ability to charge fares; participation in a ticketing scheme; and notifying timetables to the Traffic Commissioners.
-
(6) The permit should be of specified duration.
Enforcing the requirement for an interim passenger permit
-
10.55 Earlier, we pointed to the risk that a determined operator might exploit legal gaps to run an entirely unlicensed service. We wish to prevent this from occurring. However, we do not think this requires a new criminal offence. Instead, for authorised vehicles, an interim passenger permit would be required as a condition of “Tier 1” NUIC operator licences.
-
10.56 Under the recommendations in Chapter 9, vehicles without drivers or users-in-charge would require a NUIC operator licence: using a vehicle without a licence would be a criminal offence.544 We recommend that it should be a condition of NUIC operator licences that passenger services should not be conducted without an interim passenger permit. Any breach of this condition would leave the operator open to regulatory sanctions.545 “Passenger services” for these purposes would not include carrying employees or others associated with the operator. However, it would include carrying members of the public, or a section of the public, as part of a commercial service.
-
10.57 As we explain above, it will also be possible to use an interim passenger permit to provide a service using an unauthorised vehicle. If so, a safety driver would be required. The presence of a driver means that, without a permit, the service would fall within the current law of taxi, private hire or PSV licensing. Those who operate such services without any form of licence would be subject to the enforcement regimes set out in the relevant taxi, private hire or PSV legislation.
Recommendation 62.
NATIONAL ACCESSIBILITY STANDARDS AND A STATUTORY ADVISORY PANEL
-
10.59 In Consultation Paper 3, we provisionally proposed that the Secretary of State should develop national minimum standards of accessibility for authorised NUIC vehicles that carry passengers. In setting the standards, the Secretary of State should be advised by an accessibility advisory panel. Both recommendations received overwhelming support. We recommend that both the national standards and the advisory panel should be set out in legislation.
-
10.60 Feedback to our consultation about membership of the panel indicated that it should have a broad representation, including a wide variety of visible and non-visible disabilities, and from condition-specific charities. Industry should be represented, and there should be the power to remunerate members for their time.
-
10.61 Initially, the main work of the panel will be advising on trials. As trials develop, the panel will prepare guidance on best practice. Finally, the panel will advise on national standards for all automated passenger services. Stakeholders highlighted that the Secretary of State should not only be obliged to consult the advisory panel but to have due regard to its views. We agree with these suggestions.
Recommendation 63.
The accessibility advisory panel should include:
-
(1) the Equality and Human Rights Commission;
-
(2) representatives for disabled and older persons; and
-
(3) representatives from industry.
Recommendation 64.
LONGER TERM OPTIONS FOR PASSENGER SERVICES
-
10.64 There are two main approaches to redesigning passenger regulation in the longer term. 546The first is the approach we took in Consultation Paper 2, which is to start afresh, and remove the current distinctions between taxis, private hire and PSVs. We provisionally proposed a new form of service, HARPS, with a new single scheme of national operator licensing. Responses to Consultation Paper 2 highlighted a lack of consensus on how this could work, both in terms of local governance arrangements and the relationship with existing licensed modes to ensure fair competition.
-
10.65 The second approach is to amend existing taxi, private hire and PSV legislation (where necessary) so as to bring NUIC services unequivocally within the existing schemes. During this review, several stakeholders have told us that operators of NUIC vehicles would work with mixed fleets including conventional vehicles.547 In addition, the same vehicle might be used with no user-in-charge for some trips but not others. 548One advantage of bringing NUIC services within the existing model is that companies could run NUIC, user-in-charge and conventional services under the same type of licence.
-
10.66 Experience gathered from interim passenger permits could contribute the necessary evidence base to help decide which long-term option is preferable. Alternatively, amendment of existing taxi, private hire and PSV legislation to bring in NUIC services could be seen as an intermediate option. In Background Paper B we outline the provisions that may require amendment, to allow governments to assess the option in greater detail.
Chapter 11: ASDEs, NUIC operators and the duty of candour
-
11.2 However, safety assurance will rely heavily on information provided by the ASDE and NUIC operator to the regulator, both in their safety cases and in subsequent discussions. The process would be undermined by any lack of candour. We therefore recommend specific criminal offences for misrepresentations and non-disclosure that have implications for safety.
-
11.3 In Consultation Paper 3, we confined our proposals to a lack of candour by the ASDE. We said that an ASDE should face prosecution if, for example, it were to misreport test results, suppress poor test results or install a “defeat device” that made a system respond differently in tests than in real life. We now think that criminal offences should also apply to a NUIC operator. As we discussed in Chapter 9, regulators will also rely on the safety case presented by NUIC operators. In many cases, a combined ASDE/NUIC operator will present a single safety case, with safety-relevant information in respect of both roles.
WHAT WE SAID IN CONSULTATION PAPER 3
Reasons for the new offences
-
11.4 In Consultation Paper 3, we reviewed the existing offences that might apply to such situations, including corporate manslaughter, fraud and offences under the Health and Safety at Work etc Act 1974 (“the HSW Act 1974”).549 We concluded that these existing offences left gaps. We thought that new offences were necessary to:
-
(1) deter ASDEs from compromising safety standards to gain a competitive advantage;
-
(2) fill the “accountability gap” left by existing offences (particularly for non-fatal offences);
-
(3) encourage the active involvement of senior management in ensuring the safety of self-driving vehicles;
-
(4) avoid a “radical asymmetry” between the treatment of ASDEs and human drivers, who are frequently imprisoned for causing death or serious injury;
-
(5) act as a counterweight to the asymmetry of information held by the ASDE compared to the regulator; and
-
(6) allocate moral blame in the face of serious wrongdoing.
-
11.5 There is, however, a need for balance. It is important not to stifle innovation by penalising ASDEs for problems that are an inevitable part of the development process. And if penalties are too harsh, senior managers might be encouraged to cover up, rather than expose, wrongdoing. During consultation, developers also said that we should not create inconsistency between AVs and other high-risk industries. We therefore looked at the criminal offences that apply in the aviation, nuclear and pharmaceutical sectors.550
Provisional proposals
-
(1) it should be a criminal offence for an ASDE to omit safety-relevant information or include misleading information when putting a vehicle forward for classification as self-driving or responding to information requests from the regulator;
-
(2) the offence should also apply to senior managers (where it was attributable to the manager’s consent, connivance or neglect);
-
(3) the offence should not apply to more junior employees;
-
(4) the offence should carry a higher sentence if it is associated with a death or
serious injury; and
-
(1) Offence A would apply where a vehicle is put forward for authorisation as selfdriving. The ASDE would commit an offence if it failed to provide information, or provided false or misleading information, which was “relevant to the evaluation of the safety of the ADS or the vehicle”. The ASDE would have a defence if it showed that it took all reasonable precautions and exercised due diligence to avoid the wrongdoing (a “due diligence” defence).
-
(2) Offence B made similar provision where a regulator requests specific information.
-
(3) Offence C applied to senior management. A “director, manager, secretary or similar officer” would be guilty if Offence A or B was committed with their “consent or connivance” or was “attributable to their neglect”.
-
(4) Under Offence D, the first three offences would be “aggravated” and carry a higher sentence where they were linked to a death or serious injury. We proposed this would apply where the misrepresentation or non-disclosure is “related to an increased risk of a type of adverse incident”; an “adverse incident of that type occurred”; and “the adverse incident caused a death or serious injury”.
Support from consultees
-
11.8 There was strong support for our proposals: two thirds of those responding agreed, and only one respondent disagreed. 552Most thought that criminal offences targeting deception were essential to protect safety, create accountability and ensure public trust. Support was particularly strong among legal respondents. For example, the Bar Council said:
AVs being an entirely new technology, and one about which many people will feel considerable apprehension in the early period of their introduction, it is entirely appropriate to do as the Commission proposes, and adopt the more restrictive elements from existing offences that apply to comparable industries.
The safety assurance scheme will rely crucially on the ADSE to submit a safety case. All those involved in the process need to be honest, open and accurate in putting the case together. We hope that the proposed offences would deter ADSEs from compromising safety standards to gain a competitive advantage.
-
11.10 There was qualified support from industry groups. The Society of Motor Manufacturers and Traders (SMMT) accepted that criminal offences may need to be introduced as part of the overall scheme of safety assurance. However, SMMT recommended “an approach that encourages cooperation with the regulator and reserves criminal liability for extreme behaviour only”. One developer, Oxbotica, disagreed with all aspects of our proposals on the ground that criminal sanctions were “not practicable” in the AV context.
-
11.11 Alongside this high level of support, there were some areas of controversy:
-
(1) Some consultees thought that “safety-relevant information” required more specific definition.
-
(2) Consultees were concerned about the definition of “senior managers”. It was said that the definitions currently used in statute do not correspond with the practical reality of safety responsibility within the AV industry. Some thought that the ASDE should designate a single responsible senior manager. It was said that junior employees should also be guilty of an offence, especially if the employee knew that information was misleading.
-
(3) Several industry members argued that, rather than requiring the defendant to show due diligence, the prosecutor should prove knowledge or intent.
-
(4) A few consultees pointed to difficulties in defining when the non-disclosure or misrepresentation caused the death or serious injury. This led some consultees to favour a different approach, by (for example) taking the result into account in sentencing.
-
11.12 Finally, we asked whether ASDEs should be under a duty to submit information to the regulator in a clear and accessible form. Three quarters of consultees thought they should.553 A minority of consultees, however, were concerned that such a duty would be imprecise and judged only in hindsight.
-
11.13 In the light of these concerns we have refined our proposals, as discussed below.
WHEN WOULD THE OFFENCES APPLY?
Information to both the authorisation authority and the in-use regulator
-
11.14 In Consultation Paper 3, we said that the offences relating to misrepresentations and non-disclosures would apply in two circumstances: when an ASDE puts forward a vehicle for authorisation as self-driving (Offence A); and in responding to requests from the regulator before or after deployment (Offence B).
-
11.15 Some consultees commented that the offences should apply to information submitted both to the authorisation authority and to the in-use regulator. We agree and recommend offences in relation to both schemes.
Extending the offence to NUIC operators as well as ASDEs
-
11.16 We now think that the duty of candour should extend to NUIC operators as well as ASDEs. As we discuss in Chapter 9, the ASDE and the NUIC operator may be the same organisation and submit a joint safety case. We think it is important that regulators are not required to unpick the safety case and attribute statements to a particular role. Some problems might relate to both roles. For example, a safety case might understate how often remote assistance is required and overstate how many assistants will be employed: a safety failure might result from the combination of both misrepresentations.
-
11.17 Even when a NUIC operator is different from the ASDE, they will still be required to submit a safety case. This might include crucial data which the regulator relies on (such as the reliability of the connection). Candour is still required.
-
11.18 In Consultation Paper 3, we based the NUIC operator licensing scheme on principles drawn from Public Service Vehicle (PSV) licensing. PSV legislation also includes specific offences relating to false statements or forgery in relation to licence applications: for example, it is a criminal offence knowingly to make a false statement for the purposes of obtaining a PSV operator’s licence or other specified documents.554 Where the offence was committed with the consent or connivance of certain company officers; or as a result of their negligence, those officers can also be prosecuted. 555Rather than replicate slightly different offences of this type within NUIC operator licensing, we think it would be simpler and more streamlined to enact the same offences for both ASDEs and NUIC operators.
A continuing duty to provide information?
-
11.19 A few consultees thought that there should be a continuing duty to provide safetyrelevant information as it came to light. Burges Salmon said this “may be particularly relevant for products such as AVs where functionality may evolve in-use over its lifetime”. BLM pointed to the “ongoing obligation to update software” and thought that there should be a “corresponding obligation to update the safety case at the same time”. By contrast, Mobileye was concerned that information may retrospectively be found to be misleading, based on facts which were not known at the time of submission.
-
11.20 We have considered these arguments. On balance, our view is that a continuing obligation to provide safety-critical information irrespective of regulator requests would place an undue burden on the ASDE and NUIC operator. It would be difficult to know when a suspicion that previous information was incorrect crystallised into knowledge that should be disclosed. It might also result in the regulator receiving information in an unstructured way.
-
11.21 Instead, we think that the aim of ensuring that newly-acquired information is shared with the regulator can be achieved by the regulator making periodic requests for information. 556We anticipate that the in-use regulator would request information at defined intervals. We would also expect these requests to be a mixture of general and specific questions. For example, the regulator might ask the ASDE or NUIC operator: “are you aware of any other safety concerns with your vehicles?” Any lack of candour in response to these requests would fall within the scope of the offences.
Defining “safety-relevant information”
-
11.22 We proposed in Consultation Paper 3 that the offence should apply to “information that is relevant to the evaluation of safety of the ADS and the vehicle”. Some consultees were concerned that “safety-relevant information” is not sufficiently defined. P3 Mobility, for example, pointed to the injustice of prosecuting firms for ill-defined offences, where “the requirements are not clear”.
-
11.23 Several respondents asked for guidance about what constitutes safety-relevant information. For example, the SMMT noted that “the pharmaceutical industry, on which these offences are modelled, provides established and extensive guidance”.
-
11.24 We agree that it would be highly desirable for the regulators to provide guidance, on both the substance and format of information that an ASDE is expected to supply. In the event of a prosecution, the court would be free to take this into account.
-
11.25 However, the offence would not be defined by statutory guidance. As with similar offences for both the pharmaceutical and aviation industries, we recommend an offence which is expressed in general terms. The purpose of the provision is to ensure that the ASDE provides information which is relevant to an evaluation of the safety of the vehicle.557 Any attempt to define in statute what information is relevant would soon become outdated.
Misrepresentations and non-disclosures to overseas regulator
-
11.26 The legislation would only apply to misrepresentations and non-disclosures to a regulator within Great Britain. It would not apply to a misrepresentation made to a foreign type-approval authority to obtain UNECE approval.
-
11.27 We have considered a scenario where a manufacturer tells, say, the Dutch authority that tests have been done which have not been done, and therefore gains approval under a UNECE regulation. The authorisation authority might then authorise the vehicle as self-driving under the mistaken belief that the tests have been carried out. In this scenario, the matter would be one for the Dutch authorities. We do not think extra-territorial jurisdiction is needed because the authorisation authority will be able to require confirmation of any extra-territorial representations as part of the process of obtaining approval here. If the authorisation authority asked the manufacturer to confirm that the information supplied to an overseas authority was correct and complete, and the manufacturer said that it was, this would bring the matter within the scope of the offences.
DUE DILIGENCE DEFENCE
-
11.28 Under our proposals, an ASDE or NUIC operator would have a defence against making a misrepresentation or non-disclosure if it exercised due diligence. Consultees who commented on this were mostly in favour. Kennedys Law noted that “the defence of taking reasonable precautions and exercising all due diligence is a common, well-worn defence in the regulatory context”.
-
11.29 SMMT and Mills & Reeve requested regulatory guidance as to what actions will attract the defence in practice. They also pointed to the evidential burden on the defendant to raise the due diligence defence in the Human Medicines Regulations 2012.558 Regulation 101(4) states:
Where evidence is adduced that is sufficient to raise an issue with respect to the defence in paragraph (3), the court or jury must presume that the defence is satisfied unless the prosecution proves beyond reasonable doubt that it is not.
-
11.30 SMMT and Mills & Reeve thought that a similar provision should be included in our proposed offences.
-
11.31 We do not think that the approach taken in the Human Medicines Regulations 2012 would be appropriate in this context. In practice, the prosecution would not be able to prove that an ASDE failed to take all reasonable precautions, unless the ASDE adduced evidence to show what precautions it took.
-
11.32 Due diligence and other defences which put the persuasive burden on the defendant are a common part of regulatory law. They are tried and tested. 559Under our recommendations, the ASDE or NUIC operator would need to show, on the balance of probabilities, that it took reasonable precautions and exercised all due diligence to prevent the wrongdoing.
THE CRIMINAL LIABILITY OF SENIOR MANAGERS
-
11.33 The primary offences would apply to the ASDE or NUIC operator as a corporate body. However, in Consultation Paper 3, we provisionally proposed that the offences should also be committed by senior managers. We thought that this would focus the minds of senior managers on implementing a safety-first culture, operating on the basis of openness and transparency. We suggested following the model used in section 37 of the HSW Act 1974. This applies to “any director, manager, secretary or other similar officer of the body corporate”, together with any person “purporting to act in such a capacity”. These senior figures are liable for offences committed with their “consent or connivance” or “attributable to their neglect”.
-
11.34 Consultees agreed that there should be criminal liability for senior staff. However, several developers raised concerns about how our proposed definition of “senior manager” would apply to the management structures likely to be used by ASDEs. They thought that the way we phrased the offence could penalise directors with little involvement in the safety case, while failing to apply to the employees most responsible for assessing safety.
-
11.35 Several respondents noted that the person with the greatest technical knowledge about safety issues may not necessarily be a director or senior manager. Instead, they may be a technical lead or engineering specialist. As Wayve put it, “some of the most senior people in the company are technical leads with no direct managerial responsibility, but significant cross-functional influence”. Conversely, as Five AI pointed out, “a number of those who fall within the definition of officer (such as a CFO or Company Secretary) would have no direct responsibility for safety or the requisite knowledge to able to meaningfully input into this”.
-
11.36 We see merit in these observations. We think it is appropriate that the offence should apply to a wider range of senior staff, including those responsible for managing the safety process. Such senior managers should face the possibility of prosecution if the offence took place with their “consent and connivance”. However, we accept that only the senior person most directly involved in submitting the information should be prosecuted for “neglect”. Below we consider alternative definitions of senior managers; the meaning of “consent and connivance” (as opposed to “neglect”); and the role of the person who signs the safety case.
Alternative definitions of senior management
-
11.37 Many statutes refer to “any director, manager, secretary or other similar officer of the body corporate”. The word “manager” in this context has been interpreted narrowly to refer to “a person who has the management of the whole affairs of the company”.560 In other words, it applies to a person who makes board level decisions for the whole company.561 It does not apply to a person who only manages a part of the company’s activities (even a substantial part).
-
11.38 We have also considered the definition used in the Insurance Act 2015, in deciding whose knowledge is relevant when a business makes a fair presentation of the risk to its insurer. Under section 4(3), the relevant knowledge is that held by individuals who are:
-
11.39 “Senior management” is then defined as “those individuals who play significant roles in the making of decisions about how the insured’s activities are to be managed or organised”.562
-
11.40 In this context, we think it would be appropriate to widen the circle of those who face the possibility of prosecution to all those who play significant roles either in corporate decision-making as whole, or in the safety management process. Adapting the Insurance Act 2015 approach, this would include those who play significant roles in:
“Consent or connivance”
-
11.41 We have been persuaded that in most cases the offence should only apply to those who know about the wrongdoing or turn a blind eye to it. It should not apply to those with no direct responsibility for the safety case who are merely neglectful.
-
11.42 Several offences apply only to senior managers who act with “consent or connivance” (not “neglect”).563 The Law Commission’s recent discussion paper on Corporate Criminal Liability564 explains what is meant by these terms:
“Consent or connivance” goes further than encouragement. While “consent” requires proof of both awareness and a positive action, connivance (from the Latin “to close the eyes”) can include circumstances where the director is “well aware of what is going on but his agreement is tacit, not actively encouraging what happens but letting it continue and saying nothing about it”565 and “wilful blindness” (where the person has suspicion but deliberately avoids acquiring positive knowledge).566
The nominated person who signs the safety case
-
11.44 Several consultees suggested that one manager should do more than merely avoid consenting or conniving at wrongdoing. Instead, a nominated person should take active steps to ensure that the information submitted to the regulator is correct. For example, Stewarts Law argued that there should be “a compliance officer who is personally responsible for the provision of the relevant information”.
-
11.45 In Consultation Paper 3, we suggested that a nominated person should sign the safety case and be under a duty to take care that the statement is correct.567 We now think that this person should have a formal role in the legislation. The nominated person would be expected to play a senior role within the organisation, but would not necessarily be a director. We do not wish to be overly prescriptive about their place in the hierarchy: the nominated person in a major multi-national company may be further from the board than in a small start-up. However, if the nominated person is too junior, the authorisation authority would be expected to reject the safety case.
-
11.46 In our view, where it is established that the ASDE or NUIC operator is guilty of wrongdoing as a corporate body, the nominated person should also be guilty of wrongdoing unless they took precautions to prevent the offence.
-
11.47 There is some precedent for a nominated person approach in the California Autonomous Vehicle Regulations. In California, manufacturers cannot deploy AVs on public roads until an application for a deployment permit has been submitted to, and approved by, the Department for Motor Vehicles.568 The application must certify that the AV complies with specified requirements.569 The party completing the documents must sign and certify under penalty of perjury that its contents are correct.570
The nominated person’s liability: proof of neglect or a due diligence defence?
-
11.48 We have considered carefully where the burden of proof should lie in establishing the nominated person’s failure to take precautions. One possibility is to require the prosecution to show beyond reasonable doubt that the offence was attributable to the nominated person’s neglect. “Attributable to neglect” is a commonly used standard in health and safety law (as under section 37 of the HSW Act 1974). This approach accords with the normal principle that the prosecution should prove beyond reasonable doubt not only that the defendant or accused committed the relevant actions, but also that they possessed the required mental element.
-
11.49 The other possibility is to require the nominated person to establish a due diligence defence. In other words, the nominated person would have a defence if they could show on the balance of probabilities that they took reasonable precautions and exercised all due diligence to prevent the wrongdoing. This acknowledges the information asymmetry between the prosecution and the defendant or accused. The nominated person knows what steps they took to prevent the misrepresentation or non-disclosure and would be expected to have documented them before signing the safety case. By contrast, the prosecution may struggle to show what was not done in all the circumstances.
-
11.50 Either approach would be feasible in this context. However, on balance, we have reached the conclusion that the nominated person should be required to establish a due diligence defence. When an ASDE or NUIC operator submits a safety case or other safety critical information, the nominated person would need to sign and confirm that they have taken steps to ensure that the information is correct and complete. We would expect them to document the steps they took, so as to establish a due diligence defence at trial.
-
11.51 The safety of AVs is dependent on the openness and honesty of the ASDE or NUIC operator in sharing information with the regulator. This offence is intended to ensure personal responsibility for the creation of such a culture of transparency.
Criminal liability of senior managers: the overall effect
-
11.52 The cumulative effect of these recommendations is that, in the event of a breach of the duty of candour, prosecutions could be brought against both the company and the nominated person. The prosecution would not need to prove that either the company or the nominated person had acted with knowledge. However, both would have a defence if they had taken all reasonable precautions and exercised all due diligence to prevent wrongdoing.
11.53 A prosecution could also be brought against any other senior manager who had consented to or connived at the misrepresentation or non-disclosure. Here the prosecution would need to prove the necessary mental element: either that the senior manager was aware of the wrongdoing or that they had deliberately closed their eyes to it.
A NEW OFFENCE FOR OTHER EMPLOYEES?
11.54 Several respondents wanted to see some penalties imposed on other staff.571 For example, FirstGroup thought that the offence should apply to any individual where “the action leading to the offence was deliberate and without coercion”. Transport for West Midlands suggested the offence should apply where there is “substantial evidence that the junior employee was deliberately acting against the advice of superiors for any reason”. ABI and Thatcham proposed the following test:
While the onus should largely rest on senior managers, wilful omission, or purposeful dissemination of misleading information by junior employees should not preclude repercussion.
11.55 In Consultation Paper 3, we noted that most wrongdoing by junior employees was already a criminal offence. 572For example, a team leader who deliberately lied for material gain would commit an offence under section 2 of the Fraud Act 2006 (or, in Scotland, at common law).
11.56 To commit an offence under the Fraud Act 2006, the employee would need to act dishonestly, with an intention to make a gain for themselves or another, or “to cause loss to another or to expose another to a risk of loss”. We think this already covers the deliberate, non-coerced actions or the “purposeful dissemination of misleading information” mentioned by consultees.
11.57 The Fraud Act 2006 offences do not extend to mere “connivance”, as envisaged for the senior manager offence described above. A junior employee may be aware of what is going on, and let it happen, without taking steps to stop it. This may not necessarily reflect dishonesty, or an intention to make a gain or cause a loss. Instead, employees may remain passive through fear of losing their job, or through hopelessness, or because they are victims of an abusive corporate culture.
-
11.58 In our view, behaviour which goes along with corporate wrongdoing in this way should only be criminalised where it is conducted by senior managers. It would be overly demanding on junior and middle-ranking employees to make them criminally liable for merely accepting what their senior managers are doing.
AGGRAVATED OFFENCE FOR DEATH OR SERIOUS INJURY
Aggravated offences in road traffic law
-
11.59 There are currently eight “aggravated” offences of causing death or serious injury by driving. These include, for example, causing death by dangerous driving and causing serious injury by driving while disqualified.573 In these offences, the underlying behaviour is already criminal, but is treated more seriously because of the result.
-
11.60 There is widespread public support for aggravated driving offences, with calls for more offences and stronger penalties. 574In response to such calls, the Police, Crime, Sentencing and Courts Bill, currently before Parliament, introduces maximum life sentences for causing death by dangerous driving, and by careless driving under the influence of drink or drugs. It also introduces a new offence of causing serious injury by careless driving.575
-
11.61 These offences will not be committed when a vehicle is driving itself. We do not think it is right to prosecute an ASDE for the behaviour of the vehicle simply because a human driver would be prosecuted in similar circumstances. However, if wrongdoing by the ASDE or NUIC operator leads to a death or serious injury, there is a moral case for liability, and the public will want to see this reflected in both the charge and the sentence.
Our provisional proposal
-
11.62 In Consultation Paper 3, we provisionally proposed new “aggravated” offences where our other proposed offences were associated with a death or serious injury.
-
11.63 We discussed causation. We said that it may be difficult to show a direct causal relationship between the wrong (the misrepresentation or non-disclosure) and the harm (the death or injury). The wrong may be committed many years before the harm, in a quite different setting.
-
11.64 We did not wish to be over-inclusive: if, for example, an ASDE suppressed poor test results about how its technology performed at night, it would be wrong to hold the ASDE responsible for a death during the day. This is true even if, had the regulator been aware of the poor test results, the ADS feature would not have been classified as self-driving and the harm would not have occurred.
-
11.65 However, it would be too narrow to require that the suppressed test result dealt with exactly the same scenario as the one that caused the death. Take an example where two scenario tests (involving a cyclist and a pedestrian) indicated a problem with the way that the vehicle’s sensors performed at night. If this information were suppressed, the aggravated offence should apply if, as a result of the concealed problem, the vehicle struck a tree during the night and the vehicle occupants died.
-
11.66 We therefore set out a three-part test. Where a corporation or individual committed one of the other proposed offences, that offence would be aggravated where the misrepresentation or non-disclosure:
-
(1) related to an increased risk of a type of adverse incident; and
-
(2) an adverse incident of that type occurred; and
-
(3) the adverse incident caused a death or serious injury.
Consultees’ views
The risk of an adverse incident resulting in death or serious injury is very real. The threat of prosecution for an aggravated offence carrying a significant maximum sentence will act as a deterrent from compromising safety standards to gain competitive advantage and also avoids a radical asymmetry between the treatment of human drivers and ADSE.
For this to avoid being arbitrary there requires to be some link between the blameworthiness of the act or omission and the gravity of the consequence. The text in the consultation paper surrounding this point correctly (to our mind) identifies the sense in requiring some foreseeability element, such that the act or omission invited more serious consequences of the sort that eventually occurred.
-
11.69 However, some consultees criticised the concept of a “result crime”, which punishes for an outcome that may simply be a matter of chance. Mobileye thought the gravity of the offence should depend on “intent or mental state” and “the nature of the information that was omitted”, rather than the result. Five AI also said that the aggravation should relate to the risk caused, not to a single unlucky result. The Bar Council noted the irrationality of imposing higher penalties when a bad outcome arises but concluded that “this irrationality is a part of our natural human moral compass” and has therefore become part of law.
-
11.70 Some consultees expressed concern about the causation test. The SMMT thought that the three-part test “potentially exposes employees working within an ADSE to very substantial penalties, without a sufficient degree of clarity and certainty”. The Bar Council and Kennedys Law thought that it would be preferable to reflect the outcome in sentencing.
Our conclusion
-
11.71 Most consultees agreed that there should be an aggravated offence. We note the criticism made of result crimes, when the outcome may simply be a matter of chance. This, however, has to be reconciled with the natural human instinct that consequences matter. This is particularly true for road traffic offences, where there are currently eight offences of causing death or serious injury by driving. We have previously noted public pressure to create more such offences and to increase sentences.576
-
11.72 We consider that if an ASDE or NUIC operator were to misrepresent or withhold information about the safety of their vehicles or their method of operation, and this were to lead to a death or serious injury, the prosecution should reflect that outcome. The death or injury should be part of the charge and the trial, so that the victim is central to the proceedings, rather than being relegated to the sentencing decision. There would be public concern over only prosecuting for a “regulatory offence” which did not acknowledge the death or injury that had occurred.
-
11.73 Without an aggravated offence, in the event of a death, there would be pressure to prosecute for manslaughter or homicide offences. 577As we explored in Consultation Paper 3, in England and Wales, the ASDE could be prosecuted for corporate manslaughter while senior managers could face charges of gross negligence manslaughter. In Scotland, the ASDE could be prosecuted for corporate homicide578 while senior managers could face charges of culpable homicide. The same would be true of NUIC operators and their senior managers. These offences are general and uncertain, leaving considerable discretion to the jury. The reason for enacting new offences is to take pressure away from using existing offences towards our more structured approach.
-
11.74 We acknowledge that in this case, aggravated offences raise difficult issues of causation. There will be significant time lapses between signing the safety case and the death or injury, with many events which may (or may not) have taken place between the two. However, we think that our three-part test provides adequate certainty. It will also focus developers’ minds on the risk that a particular type of adverse incident may occur and underline the central message: where a developer is aware of this risk, it should communicate the information to the regulator. Our recommendation, therefore, reflects our provisional proposal on aggravated offences.
A DUTY OF FAIR PRESENTATION?
-
11.75 In Consultation Paper 3, we explained that assessing the ASDE’s safety case was central to our scheme. We raised the possibility of “data dumps” - where an ASDE provides so much unstructured information that the crucial tests are hidden in thousands of pages of material. In insurance law, a business insured is under “a duty of fair presentation” to present information to the insurer in a “reasonably clear and accessible” way. 579This means that information must be structured, indexed and signposted so that crucial issues are not lost. We asked if ASDEs should be required to present information to the safety regulator in a similar way.
-
11.76 Most consultees supported such a duty. As RoSPA said, it would “allow the safety assurance scheme to properly assess the safety case and to identify non-disclosures and misrepresentations”. However, several industry representatives felt that it would be too easy to judge the issue in hindsight, leading to criticism that the ASDE should have emphasised the failure which took place (rather than the many other possible failures which did not).
-
11.77 As discussed in Chapter 5, we think that the authorisation authority should provide guidance on how a safety case is presented. If an ASDE does provide a “data dump”, the regulator should feel free to refuse the application and ask for the case to be submitted again. However, we have been persuaded that it would be inappropriate to impose criminal liability for a badly structured safety case. It would be too tempting to judge the issue in hindsight, thinking that greater prominence should have been given to the one issue that has arisen, rather than to the hundred issues which have not.
PROSECUTION
-
11.78 In Consultation Paper 3, we provisionally proposed that the offences should be prosecuted in England and Wales by either the regulator or the Crown Prosecution Service (CPS) and in Scotland by the Procurator Fiscal.
-
11.79 The majority of consultees agreed with our proposal but did not provide reasons. However, some consultees thought that the new regulator would be better placed to prosecute than the CPS.
-
11.80 We wish to retain flexibility. The regulator will have greater understanding and knowledge of the issues. However, they may also be too close to the events that took place, especially if the ASDE or NUIC operator’s defence involves a criticism of the regulator. The CPS may be able to provide some element of independence.
-
11.81 We therefore recommend that in England and Wales the offences should either be prosecuted by the regulator or by the Crown Prosecution Service (CPS). In an individual case, the issue of how this would work could be determined through a protocol agreed between the regulator and the CPS. Such a protocol could be modelled after the Work-related Deaths Protocol (England and Wales), which coordinates the investigation and prosecution of work-related deaths between the police, the CPS and other agencies.580
-
11.82 In Scotland, regulators do not have prosecutorial powers: instead, prosecutions should be brought by the Procurator Fiscal or the Lord Advocate, as appropriate.
PENALTIES
-
11.83 In Consultation Paper 3 we drew attention to the penalties for offences which we considered equivalent. We saw the basic offence as equivalent to offences under the Human Medicines Regulations 2012, which carry a penalty of an unlimited fine and/or up to two years’ imprisonment.581 In practice, this would mean that a corporate body would face an unlimited fine (as it is not possible to imprison a corporate body). The nominated senior manager and other employees may face up to two years’ imprisonment.
-
11.84 We saw the aggravated offence as equivalent to causing death by dangerous driving, which carries a maximum prison term of 14 years. However, legislation currently before Parliament would increase the maximum penalty for causing death by dangerous driving from 14 years to life.582
-
11.85 We do not make specific recommendations about the maximum penalties in this report. Instead, we think that decision is best made by the UK Government.
Recommendation 65.
Offence A: non-disclosure or misrepresentations by the ASDE
When putting forward a vehicle for authorisation as self-driving, it should be an offence for the ASDE to
where that information is relevant to the evaluation of the safety of the vehicle.
The ASDE should have a defence if it can show that it took reasonable precautions and exercised all due diligence to prevent the wrongdoing.
Offence B: non-disclosure or misrepresentations by a NUIC operator
When applying for NUIC operator licence, it should be an offence for the applicant to
where that information is relevant to the evaluation of the safety of the operation.
The NUIC operator should have a defence if it can show that it took reasonable precautions and exercised all due diligence to prevent the wrongdoing.
Offence C: non-disclosure and misrepresentations in responding to regulators’ requests
When the regulator responsible for either pre-deployment or in-use safety requests information from an ASDE or NUIC operator it should be an offence for the recipient to
where that information is relevant to the evaluation of the safety of the vehicle or the way that it operates.
The ASDE/NUIC operator should have a defence if it can show that it took reasonable precautions and exercised all due diligence to prevent the wrongdoing.
Offence D: the consent or connivance of senior managers
Where the ASDE/NUIC operator has committed Offence A, B or C, a senior manager would also be guilty of the offence if it took place with their consent or connivance.
A senior manager should be defined as a person who plays a significant role in:
-
(1) the making of decisions about how the ASDE/NUIC operator is managed or organised, or
-
(2) the management of the safety assurance process.
Offence E: offences by the nominated person
Where the ASDE/NUIC operator has made a non-disclosure and misrepresentation in circumstances covered by offence A, B or C, the person who signed the relevant safety case or response to the request for information (“the nominated person”) would also commit the offence.
The nominated person would have a defence if they can show that they took reasonable precautions and exercised all due diligence to prevent the wrongdoing.
Offence F: aggravated offences in the event of death or serious injury following misrepresentation or non-disclosure
Where a corporation or person commits Offences A to E, the offence should be aggravated where the misrepresentation or non-disclosure:
-
(1) related to an increased risk of a type of adverse incident; and
-
(2) an adverse incident of that type occurred; and
-
(3) the adverse incident caused a death or serious injury.
-
Chapter 12: New wrongful interference offences
-
12.1 The potential for interference with automated vehicles (AVs) is a matter of great public concern. Interferences with AVs could range from computer hacking, to standing in front of an AV to obstruct its movement, to spray-painting the vehicle’s sensors.
-
12.2 Our analysis of the law in Consultation Paper 1 suggested that most conceivable forms of interference are already criminal offences. It is already a crime, for example, to obstruct the highway or to damage a vehicle. As far as hacking into a vehicle’s software is concerned, the Computer Misuse Act 1990 criminalises unauthorised access to a computer, 583which becomes a more serious offence if it creates a significant risk of death, serious injury or serious disruption to transport facilities.584 Other drivers may also be motivated to drive badly around AVs by, for example, cutting in front. However, such behaviour would be regarded as driving without reasonable consideration for other road users, 585even if it was not dangerous.586
-
12.3 Therefore, in Consultation Paper 3, we proposed only relatively minor amendments to the existing law. In summary, we proposed that:
-
(1) tampering with brakes or “other parts of a vehicle’s mechanism” under section 25 of the Road Traffic Act 1988 should include tampering with any part of the vehicle’s system (including software installed within it);
-
(2) taking a conveyance without authority under section 12 of the Theft Act 1968 should cover all motor vehicles;
-
(3) unlawful interference with vehicles and traffic signs under section 22A of the Road Traffic Act 1988 should extend to Scotland; and
-
(4) a new aggravated offence should apply where a breach of section 22A results in an AV causing death or serious injury.
SUMMARY OF RECOMMENDED CHANGES TO WRONGFUL INTERFERENCE OFFENCES
TAMPERING WITH THE MECHANISM
-
12.6 Under section 25 of the Road Traffic Act 1988, it is an offence to get on to a motor vehicle or to tamper with “the brake or other part of its mechanism” while the vehicle is on a road or in a local authority parking place, without lawful authority or reasonable cause. This offence extends to England, Wales and Scotland. In Consultation Paper 1, we noted that this offence might be useful where section 22A (dangerous interference, outlined below) does not apply, and the effect is not sufficiently permanent to amount to criminal damage.587
-
12.7 “Tampering” is not defined by the Road Traffic Act 1988. It has the ordinary meaning of “interfering with something without lawful authority or so as to cause damage”, but must amount to “something more than mere touching”.588
-
12.8 “Mechanism” is undefined and is not usually contested in proceedings. 589In Consultation Paper 1, we asked consultees whether legislative amendment should clarify that “mechanism” includes sensors. A strong majority (65%) agreed. Consultees also pointed out that “mechanism” could be interpreted as being limited to physical apparatus, which may unduly restrict the tampering offence to hardware and exclude software.
-
12.9 In Consultation Paper 3, we broadened our proposal, suggesting that the tampering offence should apply to anything that is physically part of a vehicle and any software installed within it. 590An overwhelming majority (87%) agreed.
-
12.10 Many respondents thought the proposal would improve public awareness and confidence, providing clarity, and deterring criminal behaviour. 591For example, the law firm DAC Beachcroft said:
We would agree that legislative amendment should clarify that the tampering offence in s. 25 of the Road Traffic Act 1988 applies to anything that is physically part of a vehicle and any software installed within it so as to ensure clarity. This broad approach would avoid the need to list all types of equipment and mechanisms.
Yes, the offence of tampering should apply to any and all physical and software elements of a vehicle. This is particularly important for brakes and sensors on automated vehicles, as they are heavily reliant on sensors/sensor technology to detect other vehicles and road users and are essential to ensure their safe operation on the road.
Software
-
12.12 The inclusion of software in the tampering offence was strongly supported, as software is critical to the safe operation of AVs. 592Pinsent Masons, for example, noted that:
Section 25 of the RTA 1988 only applies to a person who 'gets on to the vehicle' or 'tampers with the brake or other part of its mechanism'. In light of the introduction of ADSs, this section needs to be extended to software and all physical parts of a vehicle rather than just mechanics.
-
12.13 Some responses also made clear that updates, upgrades and any related issues should also be captured within the offence of tampering and recommended that a broad approach be taken to software.593
-
12.14 Several respondents raised concerns about the impact of hacking and tampering with data. As noted in Consultation Paper 1, we remain of the view that the broad reach of the Computer Misuse Act 1990 would cover hacking offences involving an AV.594
Conclusion
-
12.15 Given the strength of support amongst consultees, we recommend that the offence of tampering under section 25 of the Road Traffic Act 1988 should be amended to include anything that is physically part of a vehicle, including sensors, and any software installed within it.
-
12.16 While our recommendation is limited by our terms of references to AVs only, we suggest that it would be sensible for the amendment to apply to all vehicles.
Recommendation 66.
-
12.17 Legislative amendment should clarify that the tampering offence in section 25 of the Road Traffic Act 1988 applies to anything that is physically part of an automated vehicle, including sensors, and any software installed within it.
TAMPERING WITH INFRASTRUCTURE
-
12.18 In response to Consultation Paper 1, some consultees suggested that the tampering offence under section 25 should extend to any infrastructure on which AVs rely to function; for example, networks, beacons, or the data held within the system. In Consultation Paper 3 we asked for views on this suggestion.595
-
12.19 A majority (86%) saw merit in the suggestion.596 However some consultees doubted that any amendment to criminalise interference with infrastructure was necessary.597
The Bar Council provided a detailed response, highlighting that the issue was covered by existing offences.
-
12.20 We have been persuaded that any extension to infrastructure is unnecessary. Almost all interference with infrastructure relied upon by AVs would already be an offence under the existing criminal law. Dangerous interference with infrastructure is currently criminalised in England and Wales under section 22A of the Road Traffic Act 1988 and in Scotland at common law. Destroying or causing damage to infrastructure, whether or not there is an element of danger involved, amounts to the offence of criminal damage.598 Furthermore, unauthorised access to software would be covered by the Computer Misuse Act 1990.
-
12.21 Therefore, the only tampering with infrastructure that is not already criminal would be too minor to amount to criminal damage and not sufficiently dangerous to fall within section 22A. It is possible to think of examples, such as splashing mud on a road sign However, we do not view it as appropriate to extend the criminal law to cover this sort of behaviour. Therefore, our view is that we should not proceed with this proposal.
UNAUTHORISED VEHICLE TAKING
England and Wales
A person shall be guilty of an offence if, without having the consent of the owner or other lawful authority, he takes any conveyance for his own or another's use or, knowing that any conveyance has been taken without such authority, drives it or allows himself to be carried in or on it.
-
12.23 Taking a conveyance without consent is a separate statutory offence because, in England and Wales (but not in Scotland), theft requires proof of an intention to deprive the owner of property permanently.599
-
12.24 “Conveyance” means anything constructed for the carriage of a person, including any motor vehicle with a driving seat.600 However, the offence does not apply to “a conveyance constructed or adapted for use only under the control of a person not carried in or on it”. 601This presents two problems in the AV context. First, some AVs may be constructed for the carriage of goods, and not be intended to carry people at all. Second, some AVs may be designed and licensed to only carry passengers and may not have a driving seat. This means that they cannot be controlled from within the vehicle. One example would be if a group of people picked up an automated pizza delivery vehicle and put it in a ludicrous place, such as on the top of a bus shelter. Under the current law, this would not appear to be a criminal offence.
-
12.25 To ensure application of the offence to all AVs, in Consultation Paper 1 we proposed extending the application of section 12 to any motor vehicle, even those without driving seats. A great majority of consultees (87%) agreed with our proposal.
-
12.26 In light of the overwhelming support from consultees, this now forms one of our final recommendations.
Recommendation 67.
Scotland
-
12.28 The equivalent offence in Scotland of taking and driving away without consent under section 178 of the Road Traffic Act 1988 applies to all motor vehicles. Section 178(2) creates a defence where the accused acted in the reasonable belief that the owner would have given consent if asked for it. It is not dependent on the vehicle being constructed for the carriage of a person and will apply to remote control vehicles, and therefore does not need amendment.
-
12.29 In addition, “joyriding” in Scotland has been held to be theft at common law. 602Theft in Scots law involves the taking of control and possession of a tangible moveable item from its owner or custodier without their consent and with the intention to deprive the owner or custodier of it:
The defence in section 178(2) does not apply and generally the common law is used more frequently than the statutory offence. As such, the pizza delivery vehicle example above would be likely to qualify as a “nefarious purpose” and be prosecuted in Scotland under the common law of theft.
CAUSING DANGER TO ROAD USERS
England and Wales
A person is guilty of an offence if he intentionally and without lawful authority or reasonable cause:
-
(a) causes anything to be on or over a road, or
-
(b) interferes with a motor vehicle, trailer or cycle, or
-
(c) interferes (directly or indirectly) with traffic equipment,
in such circumstances that it would be obvious to a reasonable person (whose knowledge includes that of the person interfering)604 that to do so would be dangerous.
-
12.32 “Traffic equipment” includes “anything lawfully placed on or near a road by a highway authority”; a traffic sign; or “any fence, barrier or light” placed by the authorities.605
-
12.33 Section 22A is a very general offence, which would include many of the dangerous behaviours thought to be of concern, such as defacing traffic signs or white lines. It would also include interfering with the vehicle itself by, for example, blocking a sensor or using lasers to confuse a light detection and ranging (LIDAR) system,606 if this were an obviously dangerous thing to do. We consider that the expression “traffic equipment” is wide enough to include infrastructure external to an AV but required for its operation.
-
12.34 In response to Consultation Paper 1, some consultees were concerned that the section 22A offence is overly broad and might criminalise legitimate actions (such as repairs and development). The offence has two safeguards in place to confine it to only the most unreasonable behaviour. First, the offence is subject to the justifications of “lawful authority” or “reasonable cause”. “Lawful authority” would protect developers, mechanics and other individuals who are legally authorised to interfere with the vehicle. “Reasonable cause” would protect those without formal authority whose actions should not be criminalised.
-
12.35 Second, the offence only covers interferences that are objectively dangerous. “Dangerous” refers to the danger of injury or serious damage to property, and carries
its natural meaning. In determining what is objectively dangerous, the court must consider any circumstances known to the accused.
Scotland
-
(a) to the danger of the public; or
-
(b) which has caused actual injury which has been carried out; and in either case,
-
(c) which has taken place:
There is no need to demonstrate intent to cause injury nor does injury need to have been caused.609
-
12.37 For example, in MacPhail v Clark,610 a farmer set fire to a field for a legitimate purpose. Nevertheless, the farmer was convicted of culpable and reckless conduct for omitting to act when smoke from the field blew onto the road. The smoke on the road caused a vehicle to stop and another vehicle then collided with the stopped vehicle, pushing the stopped vehicle down an embankment and injuring those inside. The case illustrates the flexible nature of the offence.
-
12.38 If it is obvious to a reasonable person 611that to interfere with an AV would cause danger of injury or serious damage to property, such interference contrary to section 22A is also likely to be culpable and reckless conduct under the Scots common law offence. The existence of Scots common law offences covering the whole conduct covered by section 22A appears to have been the reason for the non-extension of section 22A to Scots law when it was enacted.612
Should section 22A extend to Scotland?
-
(1) greater harmonisation between Scots law and that of England and Wales in relation to AVs;
-
(2) development of a consistent body of case law across Scotland, England and Wales, which would be desirable for ensuring that AVs are regulated consistently across Great Britain;
-
(3) clarification for persons unfamiliar with the common law criminalisation that interference with an automated vehicle and the infrastructure on which it relies is unlawful; and
-
(4) creation of a straightforward avenue for prosecutors.
-
12.40 On the basis of this support, in Consultation Paper 3 we proposed the extension of section 22A to Scotland.613
-
12.41 In response to Consultation Paper 3, the Faculty of Advocates revised its stance and expressed opposition to the extension of section 22A into Scots law. The Faculty took the view that extending section 22A or the aggravated offence discussed below to Scotland would add uncertainty to Scots law and unnecessarily complicate prosecutions. They were unaware of any of the issues that led to the introduction of section 22A into the law of England and Wales being present in Scots law given the inherent flexibility of the Scottish common law offence. They stated:
The justifications mentioned in the consultation document do not persuade us. We consider that this criminal offence is not a principal part of the legislative regime for automated vehicles, so any consideration of harmonisation of the law about unlawful interference with autonomous vehicles or their associated infrastructure is outweighed by the importance of harmonisation of the criminality of culpable and reckless conduct of any nature across Scots law.... Creating a new statutory offence (which would presumably also require the enactment of the existing section 22A offence into Scots law) would in reality add uncertainty to Scots law and complicate prosecutions here.
-
12.42 The Scottish Courts and Tribunals Service indicated that the introduction of new statutory offences would impact on their procedures in relation to the recovery of penalties.
-
12.43 We have been persuaded that the introduction of AVs does not necessitate the extension of section 22A to Scots law. The broad scope of culpable and reckless conduct as a criminal offence is well understood in Scots law. Prosecutors should be able to apply it by analogy to interference with AVs without undue difficulty. Consistency can therefore be achieved by ensuring that all AV-related conduct that could be criminal in England and Wales, by virtue of section 22A, would also be criminal in Scotland under the culpable and reckless conduct offence.
-
12.44 Furthermore, the interpretation of section 22A itself is not beyond dispute. 614It is possible that courts north and south of the Border could reach differing outcomes in relation to the application of section 22A. That might circumvent the desired harmonisation and creation of a consistent body of case law across Great Britain.
-
12.45 For these reasons, we do not recommend that section 22A be extended to Scotland.
NEW AGGRAVATED OFFENCE OF CAUSING DEATH BY WRONGFUL INTERFERENCE
-
12.46 In Consultation Paper 1, we asked whether there should be an aggravated offence of causing death or serious injury by wrongful interference contrary to section 22A of the Road Traffic Act 1988, where the chain of causation involves an AV. Consultees were broadly in favour of such an offence.615 The main argument in favour of a new aggravated offence is the need to deter potentially dangerous behaviour such as interfering with white lines, road signs or traffic lights.616
-
12.47 Therefore, in Consultation Paper 3, we provisionally proposed an aggravated offence of wrongfully interfering with an AV, the road, or traffic equipment contrary to section 22A of the Road Traffic Act 1988, where the interference results in the AV causing death or serious injury. We thought this would meet public demands for accountability and deter individuals from wrongful interference.
-
12.48 In England and Wales, under the current law, where interference results in a death, the defendant might be charged with unlawful act manslaughter. However, the use of unlawful act manslaughter in these circumstances has been criticised, on the ground that the mental element required for section 22A does not meet the required threshold. 617The offence of gross negligence manslaughter would be available but has uncertain boundaries, which might be further blurred if case law is adapted to AVs.618 Accordingly, we think that a statutory aggravated offence would be preferable.
-
12.49 In relation to Scotland, we no longer favour the extension of section 22A to Scots law. In turn the aggravated offence under section 22A would not apply to Scots law. However, if an interference with an AV is culpable and reckless conduct which causes death, such conduct could be prosecuted in Scotland as culpable homicide. It has been observed that in relation to reckless conduct causing injury or danger, “recklessness” has the same meaning as it has in relation to culpable homicide where death has been caused by the reckless conduct. 619For such recklessness, no intention to cause harm is required. It is sufficient that there has been complete disregard for the potential danger that might result.620
Responses to Consultation Paper 3
Arguments in favour
-
12.50 Overwhelmingly, consultees (91%) agreed that the aggravated offence should apply in England and Wales. 621Some consultees noted that an aggravated interference offence would be important in acting as a deterrent to and clearly condemning such types of behaviour.622
-
12.51 The Bar Council and Kennedys Law acknowledged that if there is a causative link between the interference and the subsequent death or serious injury, that should be recognised:
Yes, if there be a causative link between the ‘tampering’ and indeed the death, then it is right and proper that a new offence is considered to mark the severity of the consequences much in line with the current range of offences that are already available under the Road Traffic Act. [Kennedys Law]
Arguments against
It seems unfair to treat tampering with AVs differently from conventional vehicles, or other machinery come to that. It can be imagined that the public might not easily distinguish between an AV and a conventional vehicle in many cases. A special punishment for these specific vehicles seems unfair.
Recommendation 68.
-
12.54 In England and Wales it should be an aggravated offence to wrongfully interfere with an AV, the road, or traffic equipment contrary to section 22A of the Road Traffic Act 1988, where the interference results in an AV causing death or serious injury.
Mental state: intent to interfere
-
12.55 In Consultation Paper 3, we proposed that the mental element of our aggravated offence should mirror that of section 22A; the act of interference forming the basis of the offence must be intentional, but there need not be an intent to bring about the consequences of that act, nor a subjective appreciation of the risk of those consequences.
-
12.56 We therefore proposed in Consultation Paper 3 that the appropriate mental element for the aggravated offence of section 22A is intent to interfere with a vehicle, the road or traffic equipment and sought views from consultees. A strong majority (76%) agreed. Given the support amongst consultees, we feel confident in maintaining our proposal.
Recommendation 69.
An “approved work” defence
-
12.58 Section 22A makes it a criminal offence for any person to interfere “without lawful authority or reasonable cause”. There is some scope for debate as to whether the two exceptions to liability, “lawful authority” and “reasonable cause”, are cumulative or alternative. On one view, the section is only intended to criminalise actions taken without lawful authority. It would not criminalise an owner or their mechanic’s bungled attempts at repair or maintenance or reasonable enhancement. An alternative view is that if the alteration renders the vehicle objectively dangerous the defendant must also have reasonable cause for doing what they did.
-
12.59 In Consultation Paper 3,624 we sought views on a possible “approved work” defence, in addition to the “lawful authority” and “reasonable cause” limitations. This defence would be designed to protect bona fide repair or maintenance work, by creating an exception to liability where the AV manufacturer or ASDE had approved the work that was carried out.
-
12.60 Views amongst consultees were mixed. There was some support for the “approved work” defence.625 However, a significant number of respondents took the view that the creation of the proposed defence is unnecessary and that the existing limitations are sufficient. 626DAC Beachcroft said:
We see “lawful authority” and “reasonable cause” as providing separate exceptions to criminal liability and so question the need for an “approved work” defence to ensure protection to those undertaking bona fide approved repairs, or maintenance operations, authorised by a vehicle manufacturer or automated driving system entity.
-
12.61 We are also not aware that section 22A has ever been used to criminalise a person for carrying out work on their own vehicle, further suggesting that an additional defence is not required. There are other offences intended to apply to a person who fails to maintain a roadworthy vehicle. 627Given the concerns raised about this defence, and the lack of strong support amongst respondents, we have concluded that it is not needed.
-
Chapter 13: Civil Liability
-
13.1 The Automated and Electric Vehicles Act 2018 (AEV Act) introduced new legislative provisions to smooth the path to compensation for those injured by automated vehicles (AVs). Broadly speaking, each listed AV must carry insurance. The insurer must then pay compensation for any damage caused by a vehicle while it is driving itself.628 The insurer may then bring a secondary claim against any person or body responsible for the incident.
-
13.2 In this chapter we start with a brief overview of the AEV Act. We then discuss the listing process under section 1. We look briefly at contributory negligence, causation and product liability under the Consumer Protection Act 1987 before considering uninsured vehicles.
-
13.3 In practice, insurers will rely heavily on vehicle-generated data to resolve claims. We therefore discuss two issues relating to data not covered by the AEV Act: how long data should be retained, and whether Authorised Self-Driving Entities (ASDEs) should be under a statutory duty to share data with insurers.
AUTOMATED AND ELECTRIC VEHICLES ACT 2018: A BRIEF OVERVIEW
-
13.4 For accidents involving conventional vehicles, liability rests with the person (usually the driver) whose negligent act or omission has caused the accident. The negligent driver is liable to any third party who is injured or killed, or who suffers damage to their property. A driver must take out third-party motor insurance “in respect of any liability which may be incurred by him ... caused by, or arising out of, the use of the vehicle”.629 The driver is then indemnified by the insurer.
-
13.5 The AEV Act takes a radically different approach. Rather than requiring insurers to indemnify drivers against their personal liability, it imposes a new form of direct liability on insurers. Section 2(1) provides that:
-
(a) an accident is caused by an automated vehicle when driving itself,
-
(b) the vehicle is insured at the time of the accident, and
-
(c) an insured person or any other person suffers damage as a result of the accident,
the insurer is liable for that damage.
-
13.6 To prevent disputes about whether the driver or the automated driving system (ADS) was controlling the vehicle at the time of the incident, insurance of the driver’s liability and the insurer’s liability under section 2(1) must be provided for under the same policy.630
-
13.7 Section 2(2) includes a similar provision for “self-insured” vehicles owned by public bodies, such as local authorities, the police or health services. Here liability is placed on the owner.
Injury to the insured person
-
13.8 Typically, compulsory motor insurance only covers the insured driver against their liability to others. It does not cover injury to the insured driver themselves.
-
13.9 By contrast, section 2 liability covers injury to the “insured person”.631 However, there are some exceptions. The insurer is not liable to a person in charge of the vehicle if the accident was “wholly due to their negligence in allowing the vehicle to begin driving itself when it was not appropriate to do so”. 632The policy may also exclude liability to an insured who has failed to install software updates that the insured “knows, or ought reasonably to know, are safety-critical”.633
Secondary claims
-
13.10 Once the insurer has settled a claim with the injured party, 634it may then claim damages from any other party liable for the accident, 635such as drivers of other vehicles involved or (if the accident was due to a fault in the vehicle or ADS) the vehicle manufacturer.
LISTING AND AUTHORISATION
-
13.11 Under section 1 of the AEV Act, the Secretary of State must prepare, and keep up to date, a list of all motor vehicles that:
-
(1) are in the Secretary of State’s opinion designed or adapted to be capable, in at least some circumstances or situations, of safely driving themselves; and
-
(2) may lawfully be used when driving themselves, in at least some circumstances or situations, on roads or other public places in Great Britain.
-
13.12 With the introduction of the authorisation process discussed in Chapter 5, a separate system for listing under the AEV Act will no longer be necessary. We recommend that section 1 is amended, so as to integrate the application of the AEV Act with the authorisation process in this report. In our view, the civil liability regime set out in sections 2 to 6 and 8 of the AEV Act should apply where a vehicle is authorised as having self-driving features under the authorisation process set out in Chapter 5.
Recommendation 70.
CONTRIBUTORY NEGLIGENCE AND CAUSATION
Contributory negligence
-
13.15 Under section 3(1) of the AEV Act, where an accident is to any extent the fault of the injured party, the normal principles of contributory negligence will apply. This means that compensation will be reduced to the extent that the court thinks is just and equitable.636 However, the way in which the AEV Act achieves this result is complex. It requires the court to imagine two counter-factual situations: first, they must treat the claim as if it had been brought against a person other than the insurer or vehicle owner under the law of tort, 637and secondly that the insurer is at fault because of the behaviour of the AV.638
Causation
-
13.16 Under section 2 of the AEV Act the accident must be “caused” by an AV when driving itself. Responses from consultees were divided over how far this implies an element of fault. 639For example, if an AV were to stop unexpectedly, and the car behind were to be struck by a third car behind it, there is uncertainty about how far this collision could be said to be “caused” by the AV.
-
13.17 In response to Consultation Paper 1, most insurers felt that there was a need for guidance on this issue, so they could price the risk. By contrast, many lawyers wished to leave the issue to the courts, so that it could be considered on a case-by-case basis.640
Consultation Paper 3 proposals
-
13.18 In Consultation Paper 3, we provisionally concluded that while there may be a need for review and clarification of these issues, the way the AEV Act dealt with them was “good enough for now”. We thought that the issues should be reconsidered after AVs have been deployed, so that decision-makers can take account of practical experience. Noone can foresee the full effect of AVs, or the many different possible circumstances surrounding the incidents that might result. Moreover, it is difficult to predict to how the courts will apply legal tests to factual situations which have not yet occurred.
-
13.19 We asked consultees if they agreed that the AEV Act provisions on contributory negligence and causation were adequate at this stage and should be reviewed in the light of practical experience.
Responses to Consultation Paper 3
-
13.20 Most consultees agreed that a review of how the AEV Act deals with causation and contributory negligence should be postponed until we have an understanding of how the Act works in practice. 641They thought that the current law was adequate, and that problems would only become apparent after deployment.
-
13.21 However, there were also requests for more guidance, particularly over causation. The Society of Motor Manufacturers and Traders, for example, proposed “that guidance be developed as soon as real-world situations begin to arise”. Some claimants’ lawyers asked for statutory clarification, as the alternative would leave “many victims fighting lengthy and costly legal battles”.642
Conclusion
-
13.22 Issues of causation and contributory negligence often defy easy answers. Instead, the courts are used to applying general principles to specific facts. We do not see legislative intervention as a priority at this stage. In the absence of any experience of how the AEV Act might apply to real life cases, we do not think that it would be helpful to speculate on how cases might arise.
-
13.23 We continue to consider that the AEV Act is “good enough for now”. 643However, we hope that the UK Government will act quickly to review the legislation if disputes under the Act are causing delays for claimants or preventing insurers from pricing policies.
SECONDARY CLAIMS UNDER THE CONSUMER PROTECTION ACT 1987
-
13.24 Under the AEV Act, insurers are directly liable to victims, but may bring a secondary claim against anyone else liable to the injured party. 644One possibility is that the insurer may bring a claim against the vehicle producer under product liability law, as set out in the Consumer Protection Act 1987 (the 1987 Act).
Problems with how product liability law treats software
-
13.25 The 1987 Act implements the EU Product Liability Directive 1985, which was not written with software in mind. There is considerable uncertainty over how far the Act applies to over-the-air software updates, provided without a physical medium.645 Consultees also raised other problems with the Act. Where algorithms are opaque it may be difficult to show either that the software was defective or that it caused the incident. The “development risks” defence (also known as the “state of the art” defence) may cause uncertainty; 646and the 10-year limitation period from the date of circulation may not be appropriate for long-lasting products.647
-
13.26 In November 2019, the European Commission’s Expert Group on Liability and New Technologies published a report on liability for emerging digital technologies. 648The Group found that “some key concepts underpinning the EU regime, as adopted in 1985, are today an inadequate match for the potential risks of emerging digital technologies”. 649In particular, emerging technologies challenge the distinction between products and services upon which the product liability regime rests.
Not essential for the introduction of AVs
-
13.27 Despite these problems, product liability law is likely to play only a limited role in the regulation of self-driving. Individuals are unlikely to litigate, given the immense difficulty and cost of bringing product liability claims, and their poor success rate.650 In Consultation Paper 1, we explained that litigation over manufacturers’ liability would not play a significant role in compensating victims, in setting standards or in allocating blame. Instead, these functions would be fulfilled, respectively, by claims under the AEV Act; by regulation under our proposed safety assurance schemes; and by the criminal justice system.651
-
13.28 In the context of AVs, litigation under the 1987 Act will mainly be brought by insurers against vehicle manufacturers. 652In Consultation Paper 1 we expressed the view that often both sides would be able to resolve matters without recourse to the law. We therefore provisionally concluded that a general review of product liability was not a priority at this stage.653
Consultation Paper 3 proposal
-
13.29 In Consultation Paper 3, we reiterated our provisional view that a review of product liability law was not essential in connection with the introduction of AVs. However, a general review was desirable, not only for AVs but across many industries.
-
13.30 We provisionally proposed that product liability law should be reviewed to take account of the challenges of emerging technologies. However, any review should cover product liability as a whole, rather than be confined to AVs: it should not form part of this project on AVs.
Responses to Consultation Paper 3
-
13.31 Most consultees (70%) agreed with the proposal.654 Many respondents argued that issues of product liability and software are not unique to AVs. They wished to maintain a single, consistent set of product liability law principles, which applied to emerging technologies across the full range of consumer products.
-
13.32 We urge the UK Government to review the way that product liability law applies to new technologies. However, it would be highly undesirable to introduce different product liability law for different areas. Given the need for consistency and the difficulty this area poses, in this report we do not recommend reforms to product liability law in relation to AVs.
-
13.33 A general review of the law of software liability would appear to be a suitable project for one or both Law Commissions.
Recommendation 71.
UNINSURED VEHICLES
-
13.35 Liability under section 2 of the AEV Act only arises where the vehicle is insured “at the time of the accident” 655 or is exempt from compulsory motor insurance.656 Although it is a criminal offence to use a vehicle without insurance,657 some users might fail to insure AVs, in the same ways that users fail to insure conventional vehicles. Users may also fail to include the self-driving addition in their insurance policy.
-
13.36 In the case of accidents involving conventional vehicles, the Motor Insurers’ Bureau (MIB) steps in as insurer of last resort. However, for the MIB agreements to apply, there must be a claim against an untraced or uninsured driver which the MIB then pays.658 This cannot apply to the AEV Act provisions, since under section 2(1), no claim against the insurer can arise at all when there is no policy in place.
-
13.37 In Consultation Paper 3, we noted that the UK Government and the MIB were in ongoing discussions about this issue and expressed the hope that it would be resolved soon. Allowing AVs to self-drive on public roads without providing for the victims of accidents caused by them to be compensated would undermine the aims of the AEV Act.
-
13.38 We provisionally proposed that measures should be put in place to compensate the victims of accidents caused by uninsured AVs. This received unanimous support from respondents. It was said to be unfair to treat the victims of uninsured AVs less favourably than the victims of other uninsured vehicles. We agree and recommend resolving the issue before the first vehicles are authorised as having self-driving features.
Recommendation 72.
DATA RETENTION
-
13.40 At present, insurers rely heavily on evidence from the insured driver to process claims. In an automated environment, this will change. The user-in-charge (where there is one) may be a victim making the claim; or may not have been looking at the road at the time of the incident. More generally, the user-in-charge will have less incentive to become involved, as their own conduct and no-claims bonus are unlikely to be in question.659 No user-in-charge (NUIC) vehicles raise even more unknowns as the vehicle may have been travelling empty, or only with passengers.
-
13.41 Instead, insurers will need to rely on vehicle-generated data to assess claims. Data is necessary to enable insurers to verify that the vehicle was in the alleged location, was driving itself, and to assist in establishing whether or not the alleged damage occurred. As the Forum of Insurance Lawyers said in response to Consultation Paper 1, claims “would be very difficult if not impossible to defend without data from the automated vehicle”.660
-
13.42 At present, there are no international standards for collision detection systems. The systems currently on the market may not be able to identify many low-energy collisions, such as those with vulnerable road users. To cover situations in which an alleged incident took place, but no collision has been detected, we thought it would be necessary to store basic data to show whether the AV was present at the alleged location and whether the ADS was engaged at a given time and place.
Our proposals
-
13.43 In Consultation Paper 1, we considered the possibility that the victims of incidents involving AVs should be required to notify the police or insurer within a set period (such as six months) so that data can be preserved. 661This was widely opposed by legal and claimant groups, who thought it unjust to remove rights from claimants against AVs, who might have good reasons for any delay.
-
13.44 In Consultation Paper 3, we highlighted that the UNECE Regulation 157 on Automated Lane Keeping Systems (the ALKS regulation) requires vehicles to have a system to store data, known as a Data Storage System for Automated Driving, or DSSAD. 662The guidelines in the ALKS regulation regarding the DSSAD only provide for the capacity to store data for around six months: after that, data will be overwritten. However, it is open to the UK Government to require that data is stored for more than six months by, for example, being uploaded onto a server.
-
13.45 We provisionally proposed that DSSAD data, together with location data, should be stored for three years to reflect the standard limitation period for bringing legal claims. We said that this would err on the side of caution. If the period proved to be too long, the law could be changed to allow earlier deletion. However, if data is stored for too short a time, it cannot be regained.
Responses to Consultation Paper 3
-
13.46 The issue proved controversial. Half of consultees agreed with the proposal, on the basis that three years struck the right balance between the rights of claimants and the burden of long-term mass data storage. Other consultees were split between those who thought three years was too long and those who thought it was too short.
-
13.47 Consultees who thought the period should be shorter focused on the cost and practical difficulties of data storage. Consultees who thought the period should be longer were against undermining the policy underlying longer limitation periods, for example where the claimant is a minor. If a child is injured, the limitation period runs until three years after they reach the age of majority, which is 18 years old in England and Wales and 16 years old in Scotland. There was little consensus as to how long any additional period should be, with consultees arguing for many different periods between just over three years and 21 years.663
Conclusion
-
13.48 The ALKS regulation currently requires vehicles to record each time an ALKS is activated or deactivated or issues a transition demand (together with a date and time stamp). It must also record when the vehicle is involved in a detected collision. In Chapter 5, we recommend that location data is also recorded, in the form of GPS coordinates alongside the time stamp. 664We see this data as the minimum needed to process claims fairly and accurately. As understanding develops, the authorisation authority may require more data to be recorded.665
-
13.49 We remain of the view that essential data should be stored for long enough to cover the great majority of claims, even if it cannot cover all possible claims. We therefore think that three years is broadly correct. However, we accept the argument put forward by APIL and others, that claims often arrive on or shortly before the day the three-year limitation expires. In these cases, a period of time will be needed for the insurer to request the data and the ASDE to find and preserve the data before it is deleted. There is little point in requiring data to be preserved for three years if it is destroyed on the day it is needed.
-
13.50 We therefore recommend that the DSSAD-equivalent data (as specified by the authorisation authority) should be retained for the three-year standard limitation period, plus another three months to enable the data to be found and preserved.666 During these additional three months, the insurer would be expected to act quickly to contact those holding the data, to ensure enough time to identify and preserve the data. We have considered whether the period should be longer (for example allowing four months for the insurer to contact the ASDE; for the ASDE to find and send the data; and for the insurer to check that the right data has been sent). We have concluded that this is not necessary, as deleting data that had already been requested would be a breach of the duty to share data, discussed below.
-
13.51 This means that ASDEs should work on the basis that all DSSAD-equivalent data will need to be uploaded to a central server, 667and retained for 39 months from the date that it is recorded. We do not think that this would be unduly onerous. Although AVs have the potential to generate huge quantities of data, the data required for the DSSAD is limited. It is a simple text file, with around 5,000 “stamps” a year.668 If, in the light of experience, it appears that long storage is almost never needed and that the costs are disproportionate, the 39-month period could be reduced.
Recommendation 73.
The required data should include (but need not be limited to) the date, time and location of each occasion when:
-
(1) a self-driving ADS feature is activated or deactivated;
-
(2) a transition demand is issued; and
-
(3) a collision is detected.
The required data should be stored for 39 months from the date when it is recorded and, where a request is made for it within that period, until the required data has been given to the insurer.
DATA SHARING
-
13.53 In Consultation Paper 3, we provisionally proposed a new statutory duty requiring those controlling AV data to disclose it to insurers, where the data is necessary to decide claims fairly and accurately.
-
13.54 We proposed this for two reasons. The first was to simplify the process for the ASDE as data controller. 669Under data protection law, a data controller may only share personal data if it can point to one of the six lawful bases set out in Article 6(1) of the UK General Data Protection Regulation. Sharing data with insurers is likely to fall within Article 6(1)(f) as it is processing necessary for the legitimate interests of a third party. However, this involves balancing the interests of the insurer and victim against those of the data subject (for example, the user-in-charge). We thought it would be simpler for the issue to fall within Article 6(1)(c), where “processing is necessary for compliance with a legal obligation to which the controller is subject”. For Article 6(1)(c) to apply, legislation would need to impose an obligation on those controlling AV data.
-
13.55 The second reason was to prevent a potentially anti-competitive practice. In discussions, fears were raised that ASDEs would force customers to take out insurance with an ASDE-nominated insurer by refusing to release data to others. Such behaviour has the potential to be anti-competitive, reducing consumer choice and, in consequence, driving up the cost of insurance for customers.
Consultees’ views
-
13.56 The great majority of respondents agreed with the proposal for a statutory duty.670 However, responses also revealed tensions between insurers and manufacturers. Insurers wanted ASDEs to be under clear duties to provide data in a timely fashion, with sanctions if they failed. They feared that otherwise manufacturers could favour their own insurance partners over independent insurers. Conversely, manufacturers -the ASDEs - worried that insurers would go beyond seeking data needed to settle claims with victims, and search for data that might be used in product liability claims against them.671
-
13.57 These differences in perspective mean that there is no real consensus on which data should be provided, when and in which format.
Conclusion
-
13.58 Our view is that the new Act should set out a general duty along the lines we proposed in Consultation Paper 3. The duty should require those controlling AV data to disclose data to insurers, where the data is necessary to decide claims fairly and accurately. This will emphasise the need for manufacturers to share data with insurers and provide a simple legal basis for doing so.
-
13.59 Legislation will not resolve all the issues about exactly what data should be shared in what time frame. 672We hope that insurers and manufacturers will be able to come to an agreement to resolve these issues, possibly by requiring data to be uploaded to a neutral server and shared according to a protocol.
-
13.60 In the absence of an agreement, the in-use regulator should issue a code of practice on the issue. We note the approach taken by the Digital Economy Act 2017, which sets out broad powers to share data. The relevant Minister is then obliged to issue a code of practice, to which all those sharing data must have regard. 673We recommend that the in-use regulator should be given a power to issue a similar code of practice.
Recommendation 74.
Recommendation 75.
-
Chapter 14: Recommendations
A NEW AUTOMATED VEHICLES ACT
Recommendation 1.
A new Automated Vehicles Act should be introduced to regulate automated vehicles on roads or other public places in Great Britain.
The UK, Scottish and Welsh governments should work together to introduce a uniform scheme that will apply across Great Britain.
Paragraph 2.76
THE TEST FOR SELF-DRIVING
Recommendation 2.
The new Act should set out a test which a vehicle must satisfy before being authorised as having a self-driving ADS feature.
For a feature to be self-driving, the authorisation authority must be satisfied that it can control the vehicle so as to drive safely and legally, even if an individual is not monitoring the driving environment, the vehicle or the way that it drives.
Vehicles that rely on ADS features to issue transition demands to users-in-charge may be authorised as self-driving provided that the transition demand:
-
(1) issues clear, multi-sensory signals;
-
(2) gives the user-in-charge sufficient time to gain situational awareness before the
end of the transition period; and
Vehicles should not be authorised as self-driving if an individual is expected to respond to objects or events in the external environment (such as low impact collisions and emergency vehicles) in the absence of a transition demand.
Paragraph 3.67
ACTIVITIES BY THE USER-IN-CHARGE
Recommendation 3.
AV regulators should develop guidance regarding activities that a user-in-charge may (or may not) undertake. This guidance should be included in the Highway Code and publicised by Government.
Paragraph 3.80
Recommendation 4.
Initially, it should be an offence for a user-in-charge:
-
(1) to use a mobile device (contrary to regulations 110 of the Road Vehicles (Construction and Use) Regulations 1986);
-
(2) to be in a position to see a non-handheld screen (contrary to regulations 109 of the Road Vehicles (Construction and Use) Regulations 1986) unless the screen cuts out at the start of a transition demand; and
-
(3) to sleep.
Paragraph 3.81
UNWITTING TAKE-OVERS
Recommendation 5.
The UK Government should work within the UNECE decision-making structures to ensure that safeguards are in place to prevent unwitting take overs by the user-in-charge.
Safeguards against unwitting take overs should also be part of domestic GB typeapproval.
Paragraph 3.85
THE SECRETARY OF STATE’S SAFETY STANDARD
Recommendation 6.
The new Act should require the Secretary of State for Transport to publish a safety standard against which the safety of automated driving can be measured. This should include a comparison with harm caused by human drivers in Great Britain.
Paragraph 4.66
Recommendation 7.
In exercising their functions, the authorisation authority and in-use regulator should have regard to the published safety standard.
Paragraph 4.67
PRE-DEPLOYMENT SAFETY ASSURANCE
Recommendation 8.
The Secretary of State for Transport should establish a domestic AV technical approval scheme to approve vehicles with ADS features which do not have UNECE approvals and which are intended for use on GB roads.
Paragraph 5.39
Recommendation 9.
The new Act should establish an authorisation scheme for vehicles equipped with ADS features to be used in Great Britain. The scheme should be administered by an authorisation authority.
Paragraph 5.63
Recommendation 10.
For a vehicle or vehicle type to be authorised in Great Britain as self-driving as having self-driving features, a prospective Authorised Self-Driving Entity (ASDE) must submit the vehicle or a vehicle representative of the type to the authorisation authority. Before granting authorisation, the authorisation authority must be satisfied that the vehicle or vehicle type:
environment, the vehicle or the way it drives;
-
(3) can record location data for detected collision events and ADS activation/ deactivation; and
-
(4) is supported by a suitable ASDE which has demonstrated its ability to comply with relevant laws (including laws on data protection and environmental protection).
Paragraph 5.97
Recommendation 11.
The authorisation authority should assess each ADS feature in relation to the vehicle with which it is presented. If authorisation is granted, it should state whether each ADS feature is authorised for use with or without a user-in-charge.
Paragraph 5.98
Recommendation 12.
To become an ASDE an applicant must:
Paragraph 5.99
Recommendation 13.
Authorisation should be conditional on the ASDE undertaking ongoing duties. These should include:
-
(1) assuring their AV will continue to drive safely and in accordance with road rules throughout the lifetime of the vehicle;
-
(2) disclosing information where required by law or if required to do so as a condition of the authorisation process;
-
(3) co-operating with the authorisation authority, the in-use regulator and the road
collision investigation branch.
Paragraph 5.100
Recommendation 14.
The new Act should give the Secretary of State for Transport power to specify requirements as to good repute and appropriate financial standing.
Paragraph 5.101
Recommendation 15.
The authorisation authority should provide guidelines on the information to be included in the safety case and equality impact assessments, and assess both documents as part of authorisation.
Paragraph 5.102
Recommendation 16.
The new Act should provide regulation-making powers to specify:
-
(1) the application process and fees;
-
(2) who should assess whether a vehicle is capable of self-driving safely;
-
(3) the procedure for doing so;
-
(4) the criteria for doing so; and
-
(5) the format of a decision (including the outcome for each ADS feature).
The new legislative framework should also require that if authorisation is granted, it should state whether the AV is authorised for use with or without a user-in-charge.
Paragraph 5.112
Recommendation 17.
The new Act should provide a process for appealing against an authorisation decision.
Paragraph 5.113
IN-USE SAFETY ASSURANCE
Recommendation 18.
The new Act should establish an in-use safety assurance scheme which gives an in-use regulator responsibilities to monitor the safety of authorised AVs and investigate infractions involving AVs, and powers to enforce its decisions.
Paragraph 6.11
Recommendation 19.
The in-use regulator should be under a statutory obligation:
-
(1) to collect and analyse data to measure the safety of automated driving against the Secretary of State’s published safety standard;
-
(2) to publish their findings; and
-
(3) to explore a range of possible measures to assess automated driving safety.
Paragraph 6.36
Recommendation 20.
The in-use regulator should be given powers to collect relevant data from ASDEs and NUIC operators so as to allow the regulator to compare the safety of automated and conventional vehicles.
Paragraph 6.37
Recommendation 21.
The in-use regulator should be under a statutory obligation:
-
(1) to investigate traffic infractions referred to it; and
-
(2) if the infraction has been caused by the ADS feature/s, apply a flexible range of regulatory sanctions.
“Traffic infraction” refers to an action (or inaction) which forms part of the dynamic driving task and which (if conducted by a human driver) would make the human driver liable for a criminal offence or civil penalty.
Paragraph 6.57
Recommendation 22.
The in-use regulator should work with police and local authorities to establish a protocol which enables traffic infractions involving AVs to be investigated efficiently and effectively.
Paragraph 6.58
Recommendation 23.
The in-use regulator should have power to require ASDEs to provide suitable, clearly worded and easily comprehensible information to owners, users-in-charge and registered keepers throughout the life of a vehicle.
Paragraph 6.66
|
Recommendation 24. |
|
The in-use regulator should have statutory powers to impose the following regulatory sanctions: |
|
(1) |
informal and formal warnings; |
|
(2) |
civil penalties; |
|
(3) |
redress orders; |
|
(4) |
compliance orders; |
|
(5) |
suspension of authorisation; |
|
(6) |
recommendation of withdrawal of authorisation; and |
|
(7) |
recommendation of attendance at a restorative conference. |
|
Paragraph 6.112 |
Recommendation 25.
The regulatory functions of the in-use regulator should be made subject to sections 21 and 22 of the Legislative and Regulatory Reform Act 2006 through the procedure set out in section 24(2) of that Act.
Paragraph 6.113
Recommendation 26.
Regulations should give the Secretary of State the power to set the maximum amount for civil penalties imposed by the in-use regulator.
Paragraph 6.114
Recommendation 27.
Compliance orders issued by the in-use regulator should be outcome oriented for technical issues but may be specific for issues which require the ASDE to communicate information to users.
Paragraph 6.115
Recommendation 28.
The new Act should create a right to appeal against decisions made by the in-use regulator.
Paragraph 6.116
|
Recommendation 29. |
|
The in-use regulator should have power to apply for a search warrant to obtain information which is relevant to an investigation. |
|
Paragraph 6.123 |
Recommendation 30.
The in-use regulator should be under a duty to engage with those with an interest in the safety of automated vehicles, including local traffic authorities, the emergency services, road user groups and experts in the field.
Paragraph 6.135
A FORUM TO COLLABORATE ON ROAD RULES
Recommendation 31.
The UK Government should establish a forum for collaboration on how road rules, traffic laws and guidance such as the Highway Code should apply to automated driving.
Paragraph 6.148
COLLISION INVESTIGATION
Recommendation 32.
An independent collision investigation unit should be given responsibility for investigating serious, complex and high-profile collisions involving automated vehicles.
Paragraph 6.154
CYBERSECURITY
Recommendation 33.
The in-use regulator should have responsibility for developing and encouraging best practice with regards to ongoing AV cybersecurity. Where a lack of security gives rise to a safety concern, the regulator’s powers to deal with safety concerns should apply.
Paragraph 6.165
MARKETING DRIVING AUTOMATION
Recommendation 34.
It should be a criminal offence to engage in a commercial practice in connection with driving automation technology designed for use on roads or in public places if the commercial practice uses:
-
(1) the terms “self-drive”, “self-driving”, “drive itself”, “driverless” and “automated vehicle”;
-
(2) any other terms prescribed by the Secretary of State for Transport by regulations; or
-
(3) any symbol or kitemark approved by the authorisation authority to identify authorised ADS features;
unless the driving automation technology is specified as a self-driving feature by the authorisation authority under the authorisation scheme recommended in this report.
The offence should not be committed if the only use of the driving automation technology is by a person who, as part of their employment, test drives vehicles equipped with driving automation technologies (a “safety driver”).
Paragraph 7.37
Recommendation 35.
It should be a criminal offence to:
-
(1) engage in a commercial practice;
-
(2) which creates a likelihood of confusion among the public (or a part of the public) licensed to drive;
-
(3) over whether a driving automation technology needs to be monitored when used on a road or public place;
-
(4) when that driving automation technology has not been specified as a self-driving feature by the authorisation authority.
Paragraph 7.45
Recommendation 36.
A due diligence defence should be available in respect of both offences (recommendations 34 and 35) if:
-
(1) the commercial practice giving rise to the offence was engaged in from outside Great Britain; and
-
(2) the person engaging in the commercial practice took all reasonable precautions and exercised due diligence to prevent drivers in Great Britain from being misled.
Paragraph 7.49
Recommendation 37.
The new Act should give the enforcement agency powers to accept voluntary undertakings and to apply to a court for civil enforcement orders in respect of both offences (recommendations 34 and 35).
Paragraph 7.57
Recommendation 38.
The new Act should require the Secretary of State for Transport to nominate an enforcement agency responsible for pursuing civil enforcement and preventing the offending conduct.
Paragraph 7.60
THE ROLE OF A USER-IN-CHARGE
Recommendation 39.
The new Act should define a user-in-charge as an individual who is in a vehicle and in position to operate the driving controls while a relevant ADS feature is engaged.
For these purposes, a “relevant ADS feature” is an ADS feature in an authorised vehicle which the authorisation authority has specified as self-driving for use with a user-in-charge.
An ADS is engaged from when it is switched on until:
-
(1) an individual takes control of the vehicle;
-
(2) (where the ADS issues a transition demand), the transition period ends; or
-
(3) (where the vehicle comes to a stop), an individual switches off the ADS or the engine; the ADS issues an alert to say that the trip is completed; or the user-in-charge leaves the vehicle voluntarily.
Paragraph 8.25
Recommendation 40.
It should be an offence to be a user-in-charge:
-
(1) without a licence authorising them to drive a motor vehicle of that class;
-
(2) while disqualified from obtaining a licence;
-
(3) with a false declaration as to any relevant disability or prospective disability;
-
(4) with uncorrected defective eyesight;
-
(5) when under the influence of drink or drugs;
-
(6) with alcohol concentration above the prescribed limit; and
-
(7) with concentration of a controlled drug above the specified limit.
Paragraph 8.33
Recommendation 41.
It should be an offence to cause or permit an unqualified or unfit person to act as a userin-charge.
Paragraph 8.41
Recommendation 42.
It should be an offence to be carried in a vehicle without a user-in-charge while an ADS feature specified for use with a user-in-charge is engaged. Persons should be guilty of the offence if they knew or ought to have known that:
Paragraph 8.50
|
Recommendation 43. |
|
A provisional licence holder should be entitled to act as a user-in-charge if accompanied by an approved driving instructor in a vehicle with dual controls. |
|
Paragraph 8.60 |
Recommendation 44.
While a relevant ADS feature is engaged, the user-in-charge should not be liable for any criminal offence or civil penalty which arises from dynamic driving.
The immunity should not apply if the user-in-charge has taken steps to override or alter the system so as to engage the ADS when it is not designed to function.
The immunity should cease if the user-in-charge deliberately interferes with the functioning of the ADS.
Paragraph 8.79
Recommendation 45.
The user-in-charge should continue to be responsible for the following matters which do not arise from dynamic driving:
-
(1) Duties to carry insurance;
-
(2) Duties to maintain the vehicle in a roadworthy condition;
-
(3) Any parking offence which continues after the ADS feature is disengaged;
-
(4) Duties following accidents to provide information and report accidents;
-
(5) Duties to ensure that child passengers wear seatbelts;
-
(6) Duties relating to loading; and
-
(7) Strategic route planning, including duties to pay tolls and charges.
The new Act should include a regulation-making power to adapt the lists of dynamic and non-dynamic offences in the light of experience, including a power to allocate some or all roadworthiness responsibilities to the ASDE.
Paragraph 8.103
Recommendation 46.
A user-in-charge should not be liable for any of the driving offences set out in sections 1 to 3A of the Road Traffic Act 1988.
Instead, a user in charge should be liable for a new offence of using a vehicle in an obviously dangerous state. The offence would be committed where:
that using the vehicle in its current state would be dangerous.
In deciding whether the vehicle is in a dangerous state, regard should be had to anything attached to or carried on or in it and to the manner in which it is attached or carried.
An aggravated form of the offence should apply where the use caused death or serious injury.
Paragraph 8.120
Recommendation 47.
The new Act should create a defence to any driving offence committed in the period immediately following a handover. The defence should be that the defendant’s driving did not fall below the standard reasonably expected of a competent and careful driver in the circumstances.
Paragraph 8.130
Recommendation 48.
The new Act should provide that a user-in-charge who fails to respond to a transition demand will acquire the legal responsibilities of a driver at the end of the transition period.
Paragraph 8.137
Recommendation 49.
The new Act should create a specific defence applying to driving offences committed in
Scotland by the driver of an automated vehicle with a user-in-charge function where:
-
(1) the accused was required to resume driving upon the expiry of a transition demand;
-
(2) the accused’s ability to resume driving was seriously impaired by a sudden medical condition;
-
(3) this condition or impairment was not caused by the accused; and
-
(4) the condition could not reasonably be anticipated by the accused.
Paragraph 8.151
NUIC OPERATOR LICENSING
Recommendation 50.
It should be an offence to use a vehicle on a road or other public place without a driver or user-in-charge unless:
-
(1) it is equipped with an ADS feature authorised for use with no user-in-charge in that operational design domain; and
-
(2) arrangements are in place for the vehicle to be overseen by a licensed NUIC operator.
Paragraph 9.87
Recommendation 51.
To obtain a NUIC operator licence, the applicant must show that it:
-
(1) is of good repute;
-
(2) has appropriate financial standing;
-
(3) conducts its operation from one or more centres within Great Britain; and
-
(4) is professionally competent to run the service.
Paragraph 9.103
Recommendation 52.
The new Act should give the Secretary of State for Transport power to specify requirements as to good repute, appropriate financial standing and operating within Great Britain.
Paragraph 9.104
Recommendation 53.
To demonstrate professional competence, the applicant must submit a documented safety management system, setting out all safety related roles and the competence required for each.
Paragraph 9.105
Recommendation 54.
To obtain a NUIC operator licence, the applicant should submit a safety case, showing how safety will be assured. Among other things, the applicant’s safety case should set out:
-
(1) how oversight will be provided to vehicles, including suitable connectivity, equipment, staff training and rest breaks;
-
(2) incident management, including communication with passengers, road users and the emergency services, together with measures to remove vehicles causing an obstruction;
-
(3) systems, expertise and equipment to maintain vehicles, install updates and ensure cybersecurity;
-
(4) data management;
-
(5) whether safety relies on any element of remote driving, and (if so) how this will be done safely; and
-
(6) ways to learn from mistakes, including links with local authorities, highway authorities and the police.
Where an ASDE and the NUIC operator are the same entity, the entity may submit a joint safety case covering both roles, to be assessed by the authorisation authority.
In other cases, the safety case should address the ASDE’s written specifications for what must be done to ensure safe operation.
Paragraph 9.110
Recommendation 55.
When granting a licence, the regulator should specify the responsibilities which fall on the NUIC operator in the terms of the licence.
Paragraph 9.114
Recommendation 56.
The new Act should give the regulator powers to impose the following regulatory sanctions on NUIC operators:
-
(1) informal and formal warnings;
-
(2) civil penalties;
-
(3) redress orders;
-
(4) compliance orders;
-
(5) suspension of licence;
-
(6) withdrawal of licence; and
-
(7) recommendation of attendance at a restorative conference.
Paragraph 9.120
Recommendation 57.
A NUIC operator should be under an obligation to respond to requests from the in-use regulator for information to monitor the continued compliance of NUIC operation. This would include information to compare the safety of NUIC vehicle operations with that of conventional vehicles.
Paragraph 9.123
Recommendation 58.
The regulator should have powers to inspect remote operation centres.
Paragraph 9.126
Recommendation 59.
The duration of a NUIC operator licence should be set in secondary legislation.
Initially, the duration should be five years.
Paragraph 9.131
Recommendation 60.
The new Act should place responsibility for NUIC operator licensing on the Secretary of State for Transport.
Paragraph 9.147
NUIC PASSENGER SERVICES
Recommendation 61.
The new Act should empower the Secretary of State for Transport and the Scottish and Welsh Ministers to issue interim permits for passenger services designed to use NUIC vehicles. The holder of an interim passenger permit would not be subject to taxi, private hire or PSV legislation.
-
(a) in the opinion of the accessibility advisory panel (recommendation 63), the service is likely to add to knowledge of how to provide automated services for older and disabled passengers by involving them in the service’s design;
-
(b) consultation has taken place with relevant highway or road authorities and the emergency services; and
-
(c) any necessary consents from the licensing authority or the local transport authority have been obtained.
-
(4) Each year, the permit holder should publish a report on the operation of the service, highlighting how the service safeguarded passengers and how it met the needs of older and disabled passengers.
-
(5) There should be power to make the permit subject to conditions. These may (among other things) specify the number of vehicles to be used; the geographic location
|
in which it takes place; the ability to charge fares; participation in a ticketing scheme; and notifying timetables to the Traffic Commissioners. |
|
(6) The permit should be of specified duration. | |
|
Paragraph 10.54 |
Recommendation 62.
It should be a condition of a “Tier 1” NUIC operator licence that a NUIC vehicle should only provide passenger services in accordance with the terms of an interim passenger permit.
Paragraph 10.58
Recommendation 63.
The new Act should establish an accessibility advisory panel to advise on granting interim passenger permits and assist in the development of national minimum accessibility standards for NUIC passenger services.
The accessibility advisory panel should include:
-
(1) the Equality and Human Rights Commission;
-
(2) representatives for disabled and older persons; and
-
(3) representatives from industry.
Paragraph 10.62
Recommendation 64.
In the longer term, the Secretary of State for Transport should set national accessibility standards to apply to all self-driving passenger services using NUIC vehicles.
Paragraph 10.63
THE DUTY OF CANDOUR
Recommendation 65.
The new Act should create the following criminal offences:
Offence A: non-disclosure or misrepresentations by the ASDE
When putting forward a vehicle for authorisation as self-driving, it should be an offence for the ASDE to
where that information is relevant to the evaluation of the safety of the vehicle.
The ASDE should have a defence if it can show that it took reasonable precautions and exercised all due diligence to prevent the wrongdoing.
Offence B: non-disclosure or misrepresentations by a NUIC operator
When applying for NUIC operator licence, it should be an offence for the applicant to
where that information is relevant to the evaluation of the safety of the operation.
The NUIC operator should have a defence if it can show that it took reasonable precautions and exercised all due diligence to prevent the wrongdoing.
Offence C: non-disclosure and misrepresentations in responding to regulators’ requests
When the regulator responsible for either pre-deployment or in-use safety requests information from an ASDE or NUIC operator it should be an offence for the recipient to
where that information is relevant to the evaluation of the safety of the vehicle or the way that it operates.
The ASDE/NUIC operator should have a defence if it can show that it took reasonable precautions and exercised all due diligence to prevent the wrongdoing.
Offence D: the consent or connivance of senior managers
Where the ASDE/NUIC operator has committed Offence A, B or C, a senior manager would also be guilty of the offence if it took place with their consent or connivance.
A senior manager should be defined as a person who plays a significant role in:
-
(1) the making of decisions about how the ASDE/NUIC operator is managed or organised, or
-
(2) the management of the safety assurance process.
Offence E: offences by the nominated person
Where the ASDE/NUIC operator has made a non-disclosure and misrepresentation in circumstances covered by offence A, B or C, the person who signed the relevant safety case or response to the request for information (“the nominated person”) would also commit the offence.
The nominated person would have a defence if they can show that they took reasonable precautions and exercised all due diligence to prevent the wrongdoing.
Offence F: aggravated offences in the event of death or serious injury following misrepresentation or non-disclosure
Where a corporation or person commits Offences A to E, the offence should be aggravated where the misrepresentation or non-disclosure:
-
(1) related to an increased risk of a type of adverse incident; and
-
(2) an adverse incident of that type occurred; and
-
(3) the adverse incident caused a death or serious injury.
Paragraph 11.86
WRONGFUL INTERFERENCE
Recommendation 66.
Legislative amendment should clarify that the tampering offence in section 25 of the Road Traffic Act 1988 applies to anything that is physically part of an automated vehicle, including sensors, and any software installed within it.
Paragraph 12.17
|
Recommendation 67. |
|
The offence of taking a conveyance without authority under section 12 of the Theft Act 1968 should cover all motor vehicles. |
|
Paragraph 12.27 |
Recommendation 68.
In England and Wales it should be an aggravated offence to wrongfully interfere with an AV, the road, or traffic equipment contrary to section 22A of the Road Traffic Act 1988, where the interference results in an AV causing death or serious injury.
Paragraph 12.54
Recommendation 69.
The mental element for the aggravated offence (recommendation 68) under section 22A should be intention to interfere with a vehicle, the road or traffic equipment.
Paragraph 12.57
CIVIL LIABILITY
Recommendation 70.
Section 1 of the Automated and Electric Vehicles Act 2018 should be amended to replace the current listing procedure with the authorisation procedure recommended in this report. The provisions of the Automated and Electric Vehicles Act 2018 concerning civil liability (sections 2 to 6 and 8) should apply to any vehicle authorised as having selfdriving features under the scheme set out in Chapter 5.
Paragraph 13.13
Recommendation 71.
The UK Government should review product liability law (including the Consumer Protection Act 1987) to take account of the challenges of emerging technologies. The review should cover product liability as a whole, rather than be confined to automated vehicles.
Paragraph 13.34
Recommendation 72.
The UK Government should put in place measures to provide compensation in respect of uninsured authorised vehicles, equivalent to that provided for under section 2(1) of Automated and Electric Vehicles Act 2018.
Paragraph 13.39
Recommendation 73.
The authorisation authority should require data to be collected and stored to process insurance claims.
The required data should include (but need not be limited to) the date, time and location of each occasion when:
-
(1) a self-driving ADS feature is activated or deactivated;
-
(2) a transition demand is issued; and
-
(3) a collision is detected.
The required data should be stored for 39 months from the date when it is recorded and, where a request is made for it within that period, until the required data has been given to the insurer.
Paragraph 13.52
Recommendation 74.
The new Act should impose a duty on those controlling AV data to disclose data to insurers, where the data is necessary to decide claims fairly and accurately.
Paragraph 13.61
Recommendation 75.
The in-use regulator should have a statutory power to issue a code of practice on AV data, to which all those disclosing data must have regard.
Paragraph 13.62
PUBLIC SECTOR
Autonomous Drivers Alliance (ADA), British Standards Institution (BSI), Centre for Connected and Autonomous Vehicles (CCAV), Centre for Data Ethics and Innovation (CDEI), Centre for the Fourth Industrial Revolution Israel, Lord Tim Clement-Jones CBE, Competition and Markets Authority (CMA), Crown Prosecution Service (CPS), National Traffic Department of Brazil (DENATRAN), Department for Business, Energy and Industrial Strategy (BEIS), Department for Infrastructure (Northern Ireland), Department for International Trade (DIT), Department for Transport (DfT), Disability Equality Scotland, Disabled Motoring UK, Disabled Persons Transport Advisory Committee (DPTAC), DPD, Driver and Vehicle Licensing Agency (DVLA), Driver and Vehicle Standards Agency (DVSA), European Commission, Federal Roads Office Switzerland (FEDRO), Health and Safety Executive (HSE), Highways England, The Highlands and Islands Transport Partnership (HITRANS), Information Commissioner’s Office (ICO), Innovate UK, Institute of the Motor Industry (IMI), International Telecommunications Union (ITU), International Vehicle Standards (IVS), Israel Innovation Authority, Intelligent Transport Systems (ITS) Japan, Joint Research Centre (JRC), Medicines and Healthcare Products Regulatory Agency (MHRA), Met Office, Metropolitan Police, Ministry of Justice (Israel), Ministry of Transportation and Road Safety (Israel), Mobility and Access Committee for Scotland (MACS), National Physical Laboratory, National Police Agency (Japan), National Transport Commission (Australia), Netherlands Vehicle Authority (RDW), Office for Low Emission Vehicles (DfT), Office for Low Emission Vehicles (OLEV), Office for Product Safety and Standards, Office of the Secretary of State for Scotland, Office of National Statistics (ONS), Oxfordshire County Council, Parliamentary Advisory Council for Transport Safety (PACTS), Police Scotland, Polis Network, Singapore Land Transport Authority, Traffic Commissioners for Great Britain, Transport Canada, Transport for Greater Manchester (TfGM), Transport for London (TfL), Transport for NSW, Transport for West Midlands (TfWM), Transport Scotland, UK Research and Innovation, United Nations Economic Commission for Europe (UNECE), Urban Transport Group, Vehicle Certification Agency (VCA), Welsh Government, World Economic Forum, Zenzic.
PRIVATE SECTOR
-
1.3 Addison Lee, Addleshaw Goddard LLP, Adelard, AESIN, Kweku Aggrey-Orleans (Barrister, 12 King’s Bench Walk), Amazon, Anxiety UK, Apollo Automobile Group Ltd, AppyWay, Association of British Insurers (ABI), Australia and New Zealand Driverless Vehicle Initiative (ADVI), AutoKAB, Automated Driving Insurer Group (ADIG), Autonomous Intelligent Driving (AID, now part of Argo AI), Aviva, BMW, Bosch, BP, Brake, British Insurance Brokers' Association (BIBA), British Parking Association (BPA), British Standards Institution (BSI), British Vehicle Rental and Leasing Association (BVRLA), Burges Salmon LLP, Burness Paull LLP, Campaign for Better
Transport, CAPRI consortium, CPC and WMG’s CertiCAV project, Cavanaugh Consulting, Chartered Institute of Highways and Transportation (CIHT), Chipside, Commission on the Future of Mobility, Connected and Autonomous POD on-Road Implementation (CAPRI), Connected Places Catapult (CPC), Certivity, Daimler AG, Darwin AI, Deloitte, DHL, Drive U, DRIVEN consortium, DriveNow, Ecomotion, EcoMotion, Edge Case Research, Endeavour consortium, Five AI, Freight Transport Association, Future Coders, Gemserv, Alex Glassbrook (Temple Garden Chambers), Goggo Network, Guide Dogs, Guy Carpenter & Company, Heathrow Airport (Heathrow Pods team), Lucy McCormick (Henderson Chambers), Hogan Lovells, If Vehicles, InMotion ventures, Intel, International Association of Traffic and Safety Sciences (IATSS), International Organization of Motor Vehicle Manufacturers (OICA), KPMG, Logistics UK, MaaS Global, Mitchell Gingrich (Autonomous Consulting), Mobile Programming LLC, Mobileye, MobOx, Motability, Motional, Motor Insurers’ Bureau (MIB), National Express, OmniCAV consortium, Ottopia, Oxbotica, P3 Mobility, PA Consulting, PIARC (World Road Association), Polis Network, Quibus, RAC Foundation, RAND, RTA Communication Systems, Road Collision Investigation Project (RCIP), Realising Accountable Intelligent Systems (RAInS), Reed Mobility, Research Institute for Disabled Consumers (RiDC), Road Haulage Association (RHA), Royal Academy of Engineering, Rydesafely, Society of Automotive Engineers International (SAE), Securing America’s Future Energy (SAFE), SafeKids, Smart Mobility Living Lab: London (SMLL), Mathias N. Schubert (Attorney at Law, Germany), Society of Motor Manufacturers and Traders (SMMT), Squire Patton Boggs LLP, Stephen Brookes MBE, StreetDrone, StreetWise consortium, Sustrans, Tech UK, Technova Inc, techUK, Tesla, Thatcham Research, Tim Marlow Ltd, Towards Identifying and closing Gaps in Assurance of autonomous Road vehicleS project (TIGARS), Transport Research Board (TRB), Transport Research Laboratory (TRL), Uber, Uber ATG (now part of Aurora), Unite the Union, University College London (UCL), Vianova, Volvo, Walking and Cycling Alliance, Warwick Manufacturing Group (WMG), Waymo, Wayve.
ACADEMICS
-
1.4 Prof Arnab Majumdar (Imperial College London), Assuring Autonomy International Programme (University of York), Shahab Gholizadeh (Brunel University), Prof Gary Burnett (University of Nottingham), Michael Cameron (New Zealand Law Foundation), Prof Oliver Carsten (University of Leeds), Dr Matthew Channon (University of Exeter), Dr Chris Elliott, Dr Robyn Emerton (King’s College London), Dr Charles Fox (University of Lincoln), Keri Grieman (The Alan Turing Institute), Andrew Higgs (Setfords Solicitors), Prof Christopher Hodges OBE (University of Oxford), Prof Takeyoshi Imai (University of Japan) Dr Geoff Keeling (University of Bristol), Dr Siddartha Khastgir (WMG, University of Warwick), Dr Johannes Kester (Transport Studies Unit - University of Oxford), Prof Sally Kyd Cunningham (University of Leicester), Dr Mark Leiser (University of Leiden), Prof Roger Mackett (University College London), Dr Bruce Mehler (Massachusetts Institute of Technology (MIT)), Prof Paul Newman (University of Oxford and Oxbotica), Dr Kyriaki Noussia (University of Reading), Dr Micheal O Floinn (University of Glasgow), Prof Richard Percival (University of Sheffield), Dr Flora Renz (University of Kent), Dr Bryan Reimer (MIT), Prof Neville Stanton (University of Southampton), Dr Chris Tennant (London School of Economics), Dr Nynke Vellinga (University of Groningen), Prof Bryant Walker Smith
(University of South Carolina), Prof Rebecca Williams (University of Oxford), Dr Adam Wyner (Swansea University), Xinyi Wu (University of Edinburgh).
CONFERENCES AND WORKING GROUPS
2018
-
1.6 The Knowledge Transfer Network’s Modelling and Simulations for CAVs competition (23 March 2018, London); The Dutch Ministry of Infrastructure and Water Management’s conference: Innovation in transportation, Facing the legal challenges ahead (9 February 2018, The Hague), CARTRE and SCOUT’s Interactive Symposium on Research & Innovation for Connected and Automated Driving in Europe (19-20 April 2018, Vienna), The Future of Transportation World Conference (19-20 June 2018, Cologne), TaaS Technology Conference (9-10 July 2018, Coventry), Federated Logic Conference 2018 - Summit on Machine Learning meets Formal Methods (13 July 2018, Oxford), SAE International’s Connect2Car Executive Leadership Forum (September 5-6 2018, San Jose CA); The Whitehall & Industry Group’s Autonomous Vehicles Workshop (14 September 2018, Birmingham); UNECE’s Global Forum for Road Traffic Safety (WP.1)’s 77th session (September 18-21 2018, Geneva), 6th Annual Smart Mobility Summit (29-30 October 2018, Tel Aviv); and CAV Scotland 2018 (31 October-1 November, Edinburgh), techUK and MobOx event (22 November 2018, Oxford), ITS (UK) Summit 2018 (27 November 2018, Bristol), Council of Europe (28 November 2018, Strasbourg).
2019
-
1.7 Consumer Electronics Show (CES) 2019 (8-12 January 2019, Las Vegas), Meridian: Mapping the Road to Cyber-Secure Self-Driving Vehicles (5 February 2019, Warwick), MobOx and Oxfordshire Country Council (16 January 2019, Oxford), Burges Salmon LLP (23 January 2019, London), techUK (25 January 2019, London), PACTS (28 January 2019, London), Safety Critical Systems Club (SCSC) Symposium (5-7 February 2019, Bristol), MOVE 2019 Conference (12 to 13 February 2019, London), Joint event of the UNECE’s Global Forum for Road Traffic Safety (WP.1) and World Forum for the Harmonization of Vehicle Regulations (WP.29) on automation in transport: safe deployment of automated vehicles in traffic (18 February 2019, Geneva), SCSC Evolution of a Safety Assurance Case Workshop (4 April 2019, London), Westminster Insight Conference: Preparing the UK for CAVs (26 April 2019, London), The National Assembly for Wales’ Economy, Infrastructure and Skills Committee meeting (1 May 2019, Cardiff), CAVEAT AV and Ethics CCAV Meeting (10 May 2019, London), Institute of Advanced Legal Studies (IALS) Impact and Law Reform Conference (11 June 2019, London), SCSC Learning from Accident Investigations Workshop (13 June 2019, London), Exploring the Power and Promise of AI and Robotics (18 June 2019, London), Institution of Mechanical Engineers: Automated and Autonomous Vehicles: Overcoming Engineering Challenges for Future Mobility (20 June 2019, Nuneaton), Connected Places Catapult - MUSICC Symposium (24 June 2019, Milton Keynes), Royal Academy of Engineering: Safety and Ethics of Autonomous Systems (2 July 2019, London), Appy Parking (7 August 2019, London), UK Insurer Safe Automated Driving Initiative Launch (11 September 2019, Nuneaton), DAC Beachcroft and Legalign Global: Automated Breakfast
Seminar (20 September 2019, London), International Longevity Centre (1 October 2019, London), AVIVA Automated Vehicles Working Group Roundtable (1 October 2019, Thatcham), SMMT 16th Annual Automotive In-House Lawyers’ Seminar (3 October 2019, London), BSI CAV Strategic Advisory Board Meeting (14 October 2019, London), BPA Annual Conference (17 October 2019), ITS Summit (17 October 2019, Coventry), DPTAC TRO Conference (23 October 2019, teleconference), Smart Mobility Summit 2019 (26 October 2019, Tel Aviv), BPA Local Authorities Meeting (South Central Group) (14 November 2019, Bedford), CAV Scotland (13 November 2019, Glasgow), Council of Europe - Judicial Committee (15 November 2019, Berlin), BPA North Local Authorities Meeting (19 November 2019, Durham), MobOx (19 November 2019, Oxford), Multi User Scenario Catalogue for Connected and Autonomous Vehicles (MUSICC) Symposium (26 November 2019, Milton Keynes), Assuring Autonomy programme, University of York, Toolkit for Responsible & Ethical Automated Driving (TREAD) Workshop (27 November 2019, York), BPA Local Authorities Annual Meeting (29 November 2019, Bath), BPA London Authorities Meeting (3 December 2019, London), PACTS Meeting (20 December 2019, London).
2020
-
1.8 CES 2020 (7 to 11 January 2020, Las Vegas), Transport Research Board (TRB) Conference (11 to 18 January, Washington DC), Future Mobility Symposium (14 January 2020, Manchester), Inclusive Mobility Forum (5 January 2020, Milton Keynes) MOVE 2020 Conference (11 to 12 February 2020, London), IBA European Regional Forum: European Automotive & Mobility Services Conference (14 February 2020, Munich), IATSS Autonomous Driving Symposium (25 February 2020, Tokyo). The following were attended by teleconference: ADVI Webinar (28 May 2020), Israel Ministry of Justice and C4IR AV Seminar (18 August 2020), Drive Sweden Forum: Transformation of the Mobility System - A Global Challenge (9 September 2020), CCAV ALKS Webinar (18 September 2020), Zenzic: Safety Case Guidance Workshop: Security and Assurance (9 October 2020), Thatcham Research ALKS Webinar 12 November 2020), (CoMotion LA (17 November 2020), Cenex-LCV 2020 (18 November 2020), Financial Times - Future of the Car Summit (4 December 2020), Aviva Autonomous Vehicles Working Group (10 December 2020), CENEX Conference (18 December 2020).
2021
-
1.9 The following events were attended by teleconference unless otherwise specified: KTN, CCAV, Zenzic and UKRI’s Connected and Autonomous Vehicle (CAV) Cohort (7 January 2021), Transport Research Board (TRB) Annual Meeting 2021, Emerging Tech Law Committee (8 January 2021); Mobility Pioneer - Public Worx Panel (9 February 2021), ITU Focus Group on AI for autonomous and assisted driving (FG-AI4AD) Webinar: a Regulatory Framework for Automated Driving: the Value of in-use Data for Creating a no-blame Culture of Safety (2 March 2021), Department for International Trade (DIT) Germany New Regulations for Automated and Autonomous Vehicles Roundtable (4 March 2021), Driverless Futures Workshop (30 March 2021), European Conference on Connected and Automated Driving (EUCAD 2021) (21 April 2021), DIT France: Connected and Autonomous vehicles challenges and opportunities in the French and British markets (4 May 2021), Office for Artificial Intelligence’s Policy Lab - AI ethics, regulation and governance (27 April 2021),
Universities of Aberdeen, Cambridge and Oxford’s Realising Accountable Intelligent Systems (RAInS) project workshop (7 July 2021), Automated Road Transport Symposium (ARTS21) AV safety metrics workshop (12 July 2021), AESIN Security Workstream conference (21 July 2021), PACTS Road Safety Strategy - Stakeholder Consultation Workshop (21 July 2021), Oxbotica Project Endeavour trial (10 August 2021, Greenwich), CAM Testbed UK and Zenzic stakeholder workshop on interoperable simulation (10 September 2021, Advanced Propulsion Centre, University of Warwick,), European Road Transport Research Advisory Council (ERTRAC) stakeholder workshop on Ethics for Connected, Cooperative and Automated Mobility (CCAM) (26 October 2021), Israel’s Ministry of Transport and Road Safety and the Smart Mobility Initiative’s Roundtable Discussion on the Current and Future Regulation of Autonomous Vehicles (8 November 2021), MOVE 2021 Conference (9 to 10 November 2021, London ExCel), International Association of Transportation Regulators 34th Annual Conference (15 December 2021).
Ongoing engagement
-
1.10 We thank Luciana Lorio, chair of the Global Forum for Road Traffic Safety (WP.1), and the secretariat, for the opportunity to regularly participate in WP.1’s sessions since September 2018, present our work, and join its Informal Group of Experts on Automated Driving (IGEAD) since 2019.
-
1.11 We are also grateful for invitations to join the following regular meetings: SMMT’s CAV Forums; Thatcham Research and the Association of British Insurers (ABI)’s Automated Driving Insurance Group (ADIG); the Department for Transport’s Steering Group, CAVPASS Programme and its Disabled Persons Transport Advisory Committee (DPTAC); PACTS Council of Members; the British Standards Institute (BSI) CAV Standards Programme; and Zenzic’s workshops.
-
1.12 We would also like to thank Ben Everitt MP, chair of the All-Party Parliamentary Group on Connected and Automated Mobility (CAM APPG), and AXA UK and Burges Salmon for the opportunity to speak at the CAM APPG in January and March 2021.
-
2.1 These are the terms of reference for the Automated Vehicles project, undertaken by the Law Commission of England and Wales and the Law Commission of Scotland, as given by the Department of Transport (DfT).
Introduction
-
2.2 Innovation in technology is opening new ways for the travelling public to plan and undertake their journeys. Automated vehicles do not readily fit within existing legal frameworks. Traditional liability models become strained in the absence of a human driver. Automated vehicles will also play a role as part of the increase in on-demand, technology-led, passenger transport provision which does not readily fit within traditional regulatory boundaries.
-
2.3 DfT has asked the Law Commission to undertake a far-reaching review to deliver by 2021 a modern and robust package of reforms promoting automated vehicles and their use as part of public transport networks and on-demand passenger services.
-
2.4 The Law Commission will be working closely with CCAV (the Centre for Connected and Autonomous Vehicles) in developing its policy proposals and CCAV’s aims will inform the Law Commission’s review. The review will be heavily based on consultation, and reflect an iterative approach to policy-making. The independence of the Law Commission, and its experience in reforming complex areas of law, with the benefit of evidence gathered in consultation with experts and stakeholders, mean it is uniquely well placed to undertake this ambitious project.
Scope
-
2.5 The Law Commission will undertake a review of the regulatory framework for roadbased automated vehicles for England and Wales with a view to enable their safe deployment. The Law Commission will also consider how automated vehicles could fit within existing regulation of public transport frameworks and innovative on-demand passenger transport provision, such as Mobility as a Service (MaaS).674
-
2.6 By automated vehicles, we mean a vehicle that is capable of driving "itself". In other words, it is operating in an automated mode in which it is not being controlled, and does not need to be monitored, by an individual for at least part of the journey (Society of Automotive Engineering "SAE" level 4 and above).675 The project will specifically consider the position of entirely automated vehicles (SAE level 5, or SAE level 4 operating in a dedicated environment, delivering a 'door-to-door' journey in automated mode, within that dedicated environment).
-
2.7 The review is part of a package of reforms being undertaken to support the deployment of automated vehicles in the United Kingdom. In particular, it builds on the work of CCAV in its Code of Practice for testing and piloting, as well as the insurance reforms contained in the Automated and Electric Vehicles (AEV) Bill 2017-19.
-
2.8 The review will consider the changes necessary to provide a robust and future-proof legal framework supporting the deployment of automated vehicles. The review will cover civil and criminal liability frameworks as they apply in the context of automated vehicles, including product liability, seller's liability, the law of negligence, criminal sanctions, insurance, road traffic legislation and the Highway Code. We note that CCAV has already begun reform in some of these areas as part of the AEV Bill to facilitate testing and early stage deployment of automated vehicles. The Law Commission's review will build on that work to develop long term reforms needed to support the fullscale deployment of automated vehicles. The review will also consider what regulatory reforms may be necessary to support the use of automated vehicles as part of on-demand, technology-led, passenger transport provision and new models of public transport.
-
2.9 The Law Commission will consider where there may be gaps or uncertainty in the law, and what reforms may be necessary to ensure the regulatory framework is fit for purpose, including but not limited to, addressing the following issues:
-
(1) who is the 'driver' or responsible person, as appropriate;
-
(2) how to allocate civil and criminal responsibility where there is some shared control in a human-machine interface;
-
(3) the role of automated vehicles within public transport networks and emerging platforms for on-demand passenger transport, car sharing and new business models providing mobility as a service;
-
(4) whether there is a need for new criminal offences to deal with novel types of conduct and interference; and
-
(5) what is the impact on other road users and how can they be protected from risk.
-
2.10 In particular, the Law Commission may consider different models of accountability in the context of artificial intelligence. These will include consideration of the appropriate legal test for the standard of care, the application of rules of causation, the appropriateness of a fault-based model of liability compared with strict liability, and options for regulation including licensing. The Law Commission will also take into account changing business models in passenger transport impacting on ownership, use and ways in which automated vehicles may be used to provide MaaS. The Law Commission will also consider the extent to which its 2014 Taxi and Private Hire Services report and draft bill, which included a framework of national standards, could be adapted to regulate automated vehicles.
-
2.11 Where ethical considerations are relevant, for example, as part of assessing the safety case for automated vehicles and software programming, the Law Commission will highlight the regulatory choices to be made. The Law Commission will however avoid judging what may or may not be desirable ethical outcomes. It may on the other hand set out possible approaches in order to promote consistency and transparency. Further, the Law Commission will not cover consequential policy issues related to the advent of automation and its impact on future workforce planning for the UK.
-
2.12 Comparative analysis will be an important aspect of this review, both as regards foreign jurisdictions, and in respect of other modes of transport where automation is already widespread, including maritime and aviation law.
-
2.13 The Law Commission will have particular regard to the following non-exhaustive list of areas. While these will not be the focus of the review, they will have a significant impact on the delivery of the overall policy, namely:
-
(1) the International Road Traffic Conventions, and any guidance produced to support these Conventions;
-
(2) CCAV's Code of Practice for testing and any updates to it;
-
(3) vehicle roadworthiness and maintenance (including Construction and Use Regulations);
-
(4) driver licensing legislation; and
-
(5) enforcement.
-
2.15 Close working relationships with departments leading on the above areas will be critical to successful delivery.
-
2.16 Subject to agreement, the review will include consideration of the regulatory frameworks of Scotland and Northern Ireland. The intention, if practicable, is to conduct this as a joint project with the Scottish Law Commission.
-
3.1 In Chapter 7 we recommend new offences to regulate the marketing of driving automation. Our concern is to prevent the public from being confused by words or images that suggest drivers do not need to pay attention to the road when using technology that is not authorised as self-driving.
-
3.2 Here we set out our analysis of existing legislation relating to misleading marketing and product safety, to see whether it adequately addresses the problem. Our conclusion is that although existing laws can be used to prevent misleading claims, their application to self-driving technologies is cumbersome and uncertain, with the risk of gaps in protection.
CONSUMER PROTECTION FROM UNFAIR TRADING REGULATIONS 2008 (CPRs)
Displaying a trust mark, quality mark or equivalent without having obtained the necessary authorisation.
-
3.4 This is automatically an offence under regulation 12.
-
3.5 In addition, it is an offence to take “misleading actions” in relation to the consumer issues covered by the CPRs. Under regulation 5, “a commercial practice is a misleading action” if:
is likely to deceive the average consumer”; and
decision he would not have taken otherwise”.
-
3.6 An average consumer is someone who is “reasonably well informed, reasonably observant and circumspect”.677
-
3.7 In turn, “a commercial practice” is defined in regulation 2 as:
any act, omission, course of conduct, representation or commercial communication (including advertising and marketing) by a trader, which is directly connected with the promotion, sale or supply of a product to or from consumers, whether occurring before, during or after a commercial transaction (if any) in relation to a product”.
-
(1) whether, how and on what terms to purchase, make payment in whole or in part for, retain or dispose of a product; or
-
(2) whether, how and on what terms to exercise a contractual right in relation to a product.
-
3.9 In other words, under the CPRs misleading actions must be aimed at how consumers buy, keep or dispose of products or exercise contractual rights. Yet the main mischief here consists of encouraging a driver to think that they do not need to monitor the driving environment. This is so irrespective of whether the driver purchased or paid for the vehicle or entered into a contract in relation to it. Regulation 5 would not apply where the driver did not purchase, sell or hire the vehicle but failed to monitor the driving environment after reading advertising material that described the vehicle as “self-driving”.
PROTECTED TERMS IN UK LAW
-
3.10 It is relatively common for specific terms to receive legal protection. For example, it is a specific offence to indicate that goods or services are approved by the Royal Family when they are not. 680It is also an offence to describe a vehicle as a “taxi” if it does not have a taxi licence. For example, under section 31 of the Private Hire Vehicles (London) Act 1998, an advertisement indicating that vehicles are available to hire may not include:
-
(1) any of the following words, namely “taxi”, “taxis”, “cab” or “cabs”, or
-
(2) any word so closely resembling any of those words as to be likely to be
mistaken for it, (whether alone or as part of another word),
unless the vehicles offered for hire are London cabs.
-
(1) A person must not label, package, sell, advertise or promote any drink as Scotch Whisky or Scotch if it is not Scotch Whisky.
-
(2) A person must not label, package, sell, advertise or promote any drink in any other way that creates a likelihood of confusion on the part of the public as to whether the drink is Scotch Whisky.
-
3.12 The key test here is “likelihood of confusion on the part of the public”. This appears wider than the “average consumer” test, which has been interpreted as a “reasonably well informed, reasonably observant and circumspect” consumer. 681 The public are likely to be confused by a headline statement (such as “Tartan” whisky) even if the bottle also states “not made in Scotland”. By contrast, a reasonably circumspect consumer may be expected to notice disclaimers.
UK PRODUCT SAFETY LAW
-
3.13 The issue may fall within product safety law. The General Product Safety Regulations 2005 (GPSR) place a general obligation on producers and distributors to ensure that products are safe. 682It is a criminal offence to offer for sale, supply or place on the market a product that is unsafe, carrying a maximum term of imprisonment of 12 months.683 This is subject to a due diligence defence, whereby a defendant can show that they took all reasonable steps and exercised all due diligence to avoid committing the offence.684
-
3.14 A safe product is defined as:685
a product which, under normal or reasonably foreseeable conditions of use including duration and, where applicable, putting into service, installation and maintenance requirements, does not present any risk or only the minimum risks compatible with the product’s use, considered to be acceptable and consistent with a high level of protection for the safety and health of persons.
-
(1) the characteristics of the product, including its composition, packaging and instructions;
-
(2) the presentation of the product, its labelling, any warnings and instructions for use; and any other indication or information regarding the product;
-
(3) the effect of the product on other products; and
-
(4) whether vulnerable consumers, such as children and the elderly, are at risk.
-
3.16 Therefore, the presentation of the product, including its labelling, is one factor to consider in deciding whether it is unsafe.
-
3.17 However, there are two limitations in relying on the duty of safety placed on distributors and producers. First, it only applies at the point of sale, supply or placing the product on the market. The duty does not continue after the point of purchase.
-
3.18 Second, it involves a complex prosecution. The dangerous product must be proven to be unsafe overall taking account of any warnings or instructions for use. A prosecutor would need to adduce evidence to show that the vehicle was unsafe overall, rather than simply focusing on the misleading name. This evidence is only likely to become available following injury. It is therefore difficult to use this provision pro-actively to prevent misleading advertising before any injuries occur.
-
3.19 The duty of safety is accompanied by a variety of other obligations, including an obligation to provide consumers with information about risks.687 Again, failure to comply is a criminal offence, albeit summary only.688 It carries a maximum term of imprisonment of 3 months or an unlimited fine or both. 689We think that AV producers will provide the minimum information required to meet this obligation, even if also providing additional marketing information which could be confusing or misleading for consumers.
-
3.20 We therefore think the GPSR are uncertain, overly complex and introduce irrelevant considerations. They would require lengthy court proceedings to show that a product was unsafe. Yet the driving automation might be safe when used correctly. The mischief is not that the product is unsafe, but that the marketing may confuse drivers into thinking they do not need to monitor its performance.
1
CCAV is an expert unit set up by the UK Department of Transport and Department for Business, Energy and Industrial Strategy, reporting to the Secretary of State for Transport.
2
These have been outlined in several reports including KPMG, 2020 Autonomous Vehicles Readiness Index, https://assets.kpmg/content/dam/kpmg/xx/pdf/2020/07/2020-autonomous-vehicles-readiness-index.pdf, p 4. See also our analysis of CP2, at paras 6.10 to 6.11 and 6.126 to 6.144.
3
This is the definition of “driving itself” in s 8(1)(a) of the Automated and Electric Vehicles Act 2018, discussed in Ch 3 at paras 3.10 to 3.12.
4
See Ch 7 where we discuss how terms used in AV marketing may confuse drivers.
5
For discussion of the boundary see Thatcham Research and Association of British Insurers, Assisted and Automated Driving - Technical Assessment (June 2018): https://news.thatcham.org/documents/thatcham-research-assisted-and-automated-driving-definitions-technical-assessment-79493 and Defining Safe Automated Driving: Insurer Requirements for Highway Automation (September 2019): https://www.thatcham.org/what-we-do/automated-driving/safe-automated-driving/.
6
See Ch 2, paras 2.34 to 2.39.
7
Use cases can overlap and we are not seeking to draw artificial distinctions. For example, self-driving vehicles which may run empty between picking up passengers for different journeys raise similar questions about the use of automated vehicles to transport light goods, for example.
8
See Ch 10, paras 10.26 to 10.58.
9
For discussion of this area see for example the Resolution on Data Protection in Automated and Connected Vehicles of the 39th International Conference of Data Protection and Privacy Commissioners Hong Kong, 25-29 September 2017; and the Working Paper on Connected Vehicles adopted at the 63rd meeting of the International Working Group on Data Protection in Telecommunications, Hungary, 9-10 April 2018.
10
See the UN Regulation 155 on uniform provisions concerning the approval of vehicles with regards to cybersecurity and cyber security management system E/ECE/TRANS/505/Rev.3/Add.154 and the UN Regulation 156 on uniform provisions concerning the approval of vehicles with regards to software updates and software update management system E/ECE/TRANS/505/Rev.3/Add.155, both of which entered into force on 22 January 2021; and CCAV, Department for Transport, and the Centre for the Protection of National Infrastructure, The key principles of cyber security for connected and automated vehicles (August 2017): https://www.gov.uk/government/publications/principles-of-cyber-security-for-connected-and-automated-vehicles/the-key-principles-of-vehicle-cyber-security-for-connected-and-automated-vehicles.
11
Land use policy in England and Wales is primarily within the remit of the Department for Transport and is for the Scottish Government in Scotland. Local authorities also play a significant role in land use policy. Issues related to infrastructure and automated vehicles are being considered by organisations such as CCAV, Highways England, and also the Urban Land Institute UK. See https://uk.uli.org/wp-content/uploads/sites/35/2015/12/Driverless-Cars-and-the-City_Conference_InfoBurst_Urban-Land-Institute_UK_2015_FINAL.pdf.
12
https://www.lawcom.gov.uk/project/automated-vehicles/.
13
https://www.lawcom.gov.uk/project/automated-vehicles/.
14
We use the term “automated driving feature” to refer to a system that can drive a vehicle in a particular set of circumstances or “operational design domain”.
15
https://www.lawcom.gov.uk/project/automated-vehicles/.
16
See https://www.lawcom.gov.uk/project/automated-vehicles/.
17
Automated Vehicles: Consultation Paper 2 on Passenger Services and Public Transport: A joint consultation paper (2019) Law Commission Consultation Paper No 245; Scottish Law Commission Discussion Paper No 169 (CP2), Ch 3.
18
CP2, Ch 8.
19
Automated Vehicles: Consultation Paper 3 - A regulatory framework for automated vehicles: A joint consultation paper (2020) Law Commission Consultation Paper No 252; Scottish Law Commission Discussion Paper No 171 (CP3), Ch 6.
20
CP3, Ch 9.
21
The following researchers at both Commissions contributed to earlier publications at various stages of this review: Eleanor Wilson, Ffion Bevan, Anna Holmes, Alexander Shattock, Fiona Petersen, Alastair Richardson, Danielle Worden, and Scott Cormack.
22
This split is reflected in the UNECE’s structure for regulating technical motor vehicle requirements through Working Party 29 (under the revised 1958 agreement); and road traffic safety through Working Party 1 (under the Vienna Convention on Road Traffic 1968 (adopted 8 November 1968, entered into force 21 May 1977) 1042 UNTS 17 (the Vienna Convention) and the Geneva Convention on Road Traffic 1949 (adopted 19 September 1949, entered into force 26 March 1952) 125 UNTS 3). Amendment 34bis to the Vienna Convention also highlights the distinction between rules about the operation and use of ADSs (a matter for domestic law) compared with technical requirements concerning the vehicle, equipment or parts themselves (matters for both domestic and international legal instruments).
23
The term ADS is explained below at para 2.21(1).
24
Society for Automotive Engineers International (SAE), J3016 Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles (April 2021) (SAE Taxonomy J3016),
25
SAE Taxonomy J3016, pp 1 and 24.
26
People often refer to the tables published by the SAE rather than engaging with the full SAE Taxonomy set out in the detailed 41-page document. A common misconception is that ‘Level 5’ systems are the only ones that do not require any human intervention to complete a trip (whereas this can also include Level 4 systems, if the trip is entirely within the operational design domain).
27
SAE Taxonomy J3016, para 5.4.
28
SAE Taxonomy J3016, para 3.16.
29
SAE Taxonomy J3016, para 8.2.
30
SAE Taxonomy J3016, para 3.10 (DDT). This is a summary of the general definition of the DDT and its six subtasks which also encompass the operational and tactical aspects of driving. These include manoeuvre planning and enhancing conspicuity through lighting and signalling.
31
SAE Taxonomy J3016, para 3.19.
32
It is an offence for a person to drive a car on a road with a child passenger under 14 years of age who is not wearing the appropriate seat belt or restraint: Road Traffic Act 1988, s 15.
33
SAE Taxonomy J3016, p 17, para 3.21.
34
SAE Taxonomy J3016, p 11, para 3.12, note 6.
35
SAE Taxonomy J3016, para 3.2.
36
SAE Taxonomy J3016, para 3.7 note 2. Where a driving automation system feature can perform the entire DDT, the SAE refer to it as an “ADS feature”: see note 1 and examples 2 and 3.
37
SAE Taxonomy J3016, para 7.1. It is described as a “vernacular term” which is “sometimes used— inconsistently and confusingly—to characterize driving automation systems and/or vehicles equipped with them”.
38
Automated and Electric Vehicles Act 2018, s 1(1).
39
UN Regulation 157 on uniform provisions concerning the approval of vehicles with regard to Automated Lane Keeping Systems E/ECE/TRANS/505/Rev.3/Add.156 (ALKS Regulation).
40
In August 2020, the UK Government issued a call for evidence, exploring whether ALKS meet the test for self-driving set out in the AEVA 2018: CCAV, Safe Use of Automated Driving Systems Call for Evidence (August 2020). In April 2021 the UK Government published the responses received and consulted on possible changes to the Highway Code for the safe use of ALKS. See https://www.gov.uk/government/consultations/safe-use-of-automated-lane-keeping-system-on-gb-motorways-call-for-evidence.
41
See Daimler, “Mercedes-Benz receives world’s first internationally valid system approval for conditionally automated driving” (9 December 2021):
https://media.daimler.com/marsMediaSite/en/instance/ko.xhtml?oid=52173961&viewType=list.
42
Mercedes-Benz, “Mercedes-Benz receives world’s first internationally valid system approval for conditionally
automated driving”: https://mercedes-benz-media.co.uk/en-gb/releases/1455#:~:text=AMG%20SL-,Mercedes%2DBenz%20receives%20world%27s%20first%20internationally%20valid%20system%20approv al%20for,a%20Level%203%20system1.
43
See CP3, Ch 3, for a full description and analysis of ALKS.
44
See UNECE, “UN regulation on Automated Lane Keeping Systems (ALKS) extended to trucks, buses and coaches” (26 November 2021): https://unece.org/media/press/362551.
45
For an overview of the changes under discussion by the Special Interest Group for Regulation 157, see Informal document, GRVA-11-32, 11th GRVA, 27 September to 1 October 2021, Agenda item 4(d), available at https://unece.org/sites/default/files/2021-09/GRVA-11-32e_0.pdf ; and the documents discussed at the Special Interest Group’s 11th meeting on 9 to 10 December, available at https://wiki.unece.org/display/trans/UNR157+-+11th+session.
46
As explained in the SAE Table, driving automation includes driver support features while automated driving does not.
47
The European New Car Assessment Programme (Euro NCAP) helps consumers across the EU and UK compare vehicles using a safety rating based on tests it designs and carries out. It developed automated driving tests in 2018 (revised as assisted driving tests in 2020) for assisted driving systems. See https://www.euroncap.com/en/vehicle-safety/safety-campaigns/2018-automated-driving-tests/ and https://www.euroncap.com/en/vehicle-safety/safety-campaigns/2020-assisted-driving-tests/.
48
ABI/Thatcham, Defining Safe Automated Driving: Insurer Requirements for Highway Automation (September 2019): see https://www.abi.org.uk/globalassets/files/publications/public/motor/2019/defining-safe-automation-technical-document-aug-2019.pdf. See also SMMT’s guiding principles for marketing automated vehicles developed and agreed by CCAV’s AV DRiVE working group: https://www.smmt.co.uk/2021/11/smmt-publishes-guiding-principles-for-marketing-automated-vehicles/.
49
Department for Transport, Code of Practice: Automated vehicle trialling, (February 2019)
https://www.gov.uk/government/publications/trialling-automated-vehicle-technologies-in-public/code-of-practice-automated-vehicle-trialling.
50
James Stacey Taylor, “autonomy” (Encyclopaedia Britannica, 20 June 2017): see https://www.britannica.com/topic/autonomy.
51
SAE Taxonomy J3016, para 7.1.1. The SAE comments that the use of terms such as “autonomous” and “self-driving” “can lead to confusion, misunderstanding, and diminished credibility” (para 7.1).
52
For further discussion, see Thatcham, “Automated Driving hype is dangerously confusing drivers, study reveals” (7 January 2019): https://www.thatcham.org/automated-driving-hype-is-dangerously-confusing-drivers-study-reveals/.
53
Road traffic legislation refers frequently to vehicles on a road or in a public place. For England and Wales, the Road Traffic Act 1988, s 192 defines a road as “any highway and any other road to which the public has access, and includes bridges over which a road passes”, Similar definitions are to be found in the Public Passenger Vehicles Act 1981, s 82; Goods Vehicles (Licensing of Operators) Act 1995, s 58; Road Traffic Offenders Act 1988, s 98; and Transport Act 1982, s 75. In Scotland, the main definition is to be found in the Roads (Scotland) Act 1984, s 151(1).
54
CP3, paras 2.3 to 2.12 and Appendix 2.
55
Clarke v General Accident Fire and Life Assurance Corpn plc and Cutter v Eagle Star Insurance Co Ltd [Conjoined Appeals] [1998] 1 WLR 1647 at 1652, citing Harrison v Hill 1932 JC 13 at 16; in Scotland: Aird v Vannet 1999 JC 205.
56
Cowan v DPP [2013] EWHC 192 (Admin), [2013] All ER (D) 116 (Jan); in Scotland: Brown v Braid 1985 SLT 37. For discussion of the even wider approach taken, see Appendix 2.
57
As discussed in CP3, Appendix 2, in Scots law access can include unlawful access, provided it is not obtained through overcoming a physical obstruction or in defiance of an express or implied prohibition: see Teale v Macleod 2008 SCCR 12 at [7] and [9] following Harrison v Hill 1932 JC 13 at 17 (Lord Sands).
58
Yates v Murray 2004 JC 16 at 21.
59
The proposed alterations to the Highway Code, a table of proposed changes and an explanatory memorandum were laid before Parliament on 1 December 2021 and are available at: https://www.gov.uk/government/consultations/review-of-the-highway-code-to-improve-road-safety-for-cyclists-pedestrians-and-horse-riders#history.
60
See Ch 5, paras 5.82 to 5.92.
61
For further discussion of the role and responsibilities of an ASDE, see Ch 5, paras 5.93 to 5.102.
62
See Ch 8, paras 8.9 to 8.25.
63
See Ch 3, paras 3.3 to 3.18.
64
Figure 2.2 Overview of the key legal actors.
65
For further discussion, see Ch 5, paras 5.3 to 5.43.
66
See Scotland Act 1998 s 28(8) (in Scotland), Government of Wales Act 2006 s 107(6), and the Sewel Convention: https://researchbriefings.files.parliament.uk/documents/SN02084/SN02084.pdf.
67
Scotland Act 1998, sch 5, head E1(d). Exceptions include parking, the offence of failing to comply with road signs and road safety information.
68
Scotland Act 1998, sch 5, head E1(d).
69
Scotland Act 1998 sch 5, head C8. Type approval constitutes “technical standards and requirements in relation to products” which, before EU exit, were obligations under EU law.
70
Civil wrongs, usually compensated by damages, the equivalent of the law of tort in England and Wales.
71
Including penalties and rules of procedure and evidence.
72
Scotland Act 1998, sch 5, head E1(b).
73
Government of Wales Act 2006, sch 7A, s E1.
74
Government of Wales Act 2006, sch 7A, s E1, para 113,
75
Scotland Act 1998, sch 5, head E1(d).
76
Scotland Act 1998, sch 5, head E1(c).
77
See the specific exceptions in Scotland Act 1998, sch 5, head E1(c) and below.
78
The protected characteristics are set out in s 4 of the Equality Act 2010: age; disability; gender reassignment; marriage and civil partnership; pregnancy and maternity; race; religion or belief; sex; and sexual orientation.
79
Equality Act 2010, s 149.
80
NHTSA determined that 291 deaths were caused by air bags between 1990 and July 2008, primarily due to the extreme force that is necessary to meet the performance standard of protecting the unbelted adult male passenger. See D Glassbrenner, “Estimating the Lives Saved by Safety Belts and Air Bags”: https://nces.ed.gov/FCSM/pdf/2003FCSM_Glassbrenner.pdf, referred to in J M Anderson and others, Autonomous Vehicle Technology, A Guide for Policy Makers (RAND Corporation, 2016), https://www.rand.org/pubs/research_reports/RR443-2.html, p 102.
81
See Steve Lohr, “Facial Recognition Is Accurate, if You’re a White Guy” (NY Times, 9 February 2018): https://www.nytimes.com/2018/02/09/technology/facial-recognition-race-artificial-intelligence.html. Recently, the BBC reported that the UK passport photo checker programme was twice as likely to fail photographs submitted by darker-skinned women compared with those submitted by lighter skinned men: Maryam Ahmed, “UK passport photo checker shows bias against dark-skinned women” (BBC News, 7 October 2020): https://www.bbc.co.uk/news/technology-54349538.
82
For discussion of this issue in the context of gender, see C Criado Perez, Invisible Women: Exposing Data Bias in a World Designed for Men (2019).
83
CP3, Consultation Question 6. For further discussion, see Analysis of Responses to CP3 at para C.110.
84
J-F Bonnefon, and others, Ethics of Connected and Automated Vehicles Recommendations on road safety,
privacy, fairness, explainability and responsibility (European Commission, 2020) https://data.europa.eu/doi/10.2777/966923.
85
They cited M Syed, Rebel Ideas: The Power of Diverse Thinking (2019) and Caroline Criado Perez, Invisible Women: Exposing Data Bias in a World Designed for Men (2020).
86
Mayor of London, Mayor’s Transport Strategy (2018), p 25.
87
In 2019, in England, adults with mobility difficulties made an average of 21 trips per person per year in taxis or private hire vehicles, compared to 11 such trips for the general population. DfT, Taxi and Private Hire Statistics 2021 (30 June 2021), p 14.
88
Hearing Link, “Facts about deafness and hearing loss” (April 2021): https://www.hearinglink.org/your-hearing/about-hearing/facts-about-deafness-hearing-loss/.
89
There are hearing requirements for coach and lorry drivers: see https://www.gov.uk/deafness-and-driving.
90
EU Revised General Safety Regulation (EU) 2019/2144, Official Journal L 325 of 16.12.2019 p 1.
91
UN Regulation 157 on uniform provisions concerning the approval of vehicles with regard to Automated Lane Keeping Systems E/ECE/TRANS/505/Rev.3/Add.156 (ALKS Regulation).
92
Out of 85 consultees, 67 (79%) agreed, 2 disagreed and 16 (19%) responded “other”.
93
See Ch 5, paras 5.79 to 5.80.
94
Out of 80 respondents who answered this question, 63 (79%) agreed, 5 (6%) disagreed and 12 (15%) gave other responses.
95
See Ch 13, paras 13.53 to 13.62.
96
The CP3 response we received from FG-AI4AD commented: “There are currently no regulations, no standards, no testing procedure or even industry best practice for assisted or automated driving system detection of low-impact collisions, vulnerable road user collisions, runover events or near miss events” (p 11).
97
Above, p 14. FG-AI4AD carried out public attitude research, asking “A young girl called Molly is crossing the road alone and is hit by an unoccupied self-driving vehicle. There are no eye-witnesses. What should happen next?”. Almost all (99%) of those asked said that it was crucial to record data about this event.
98
See CP3, paras 17.83 to 17.86, where we cited studies to suggest that considerably more information (including video feeds) may be needed, from up to 30 seconds before the crash to 10 seconds after it.
99
N Reed, S Khastgir, P Spence, B Balcombe and N Fleming, A review of CAV safety benchmarking and a proposal for a “Digital Commentary Driving” technique (BSI/CCAV, June 2021): see
https://www.bsigroup.com/globalassets/localfiles/en-gb/cav/bsi-cav-safety-benchmarking-report-2021.pdf.
100
For discussion, see CP3, paras 4.8 to 4.14 and ABI/Thatcham, Defining Safe Automated Driving (September 2019): see https://www.abi.org.uk/globalassets/files/publications/public/motor/2019/defining-safe-automation-technical-document-aug-2019.pdf.
101
This is summarised in CP1, Appendix 3. See also recent research by MIT using attention map and confusion matrix methodologies of glance behaviour across secondary tasks to compare this behaviour with baseline driving: B Reimer and others “Patterns in transitions of visual attention during baseline driving and during interaction with visual-manual and voice-based interfaces” (2021) 64 Ergonomics 1429.
102
Automated and Electric Vehicles Act 2018, s 8(1)(a).
103
The SAE Taxonomy J3016 refers to the following aspects of the dynamic driving task: lateral vehicle motion control via steering; longitudinal vehicle motion control via acceleration and deceleration; object and event response execution; manoeuvre planning and enhancing conspicuity. Society of Automotive Engineers International (SAE), J3016 Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles (April 2021) (SAE Taxonomy J3016), para 3.10 sub-paragraphs 1, 2, 4, 5 and 6.
104
SAE Taxonomy J3016.
105
SAE Taxonomy J3016, para 3.10.
106
SAE Taxonomy J3016, para 3.18.
107
The SAE also refer to a fourth form of monitoring: monitoring the user “to assess whether and to what degree the user is performing the role specified for him/her” (para 3.18.1). Here we are not concerned with the monitoring of users but with monitoring of the vehicle and the driving environment. Under our scheme, a user-in-charge will be required to be qualified and fit to drive and will be responsible for monitoring their own fitness. For example, if they are not permitted to sleep, they will need to monitor their own level of drowsiness. Even if the ADS includes user monitoring technology, this would not absolve the user-in-charge from their responsibility to remain fit to drive.
108
SAE Taxonomy J3016, para 3.14.4, Note 4.
109
SAE Taxonomy J3016, para 3.18.3.
110
CP3, Consultation Question 1. For a full discussion of responses to this question, see Analysis of Responses to CP3 at para B.5.
111
P Koopman and B Osyk, “Safety Argument Considerations for Public Road Testing of Autonomous Vehicles” (2019) 1(2) SAE International Journal of Advances and Current Practices in Mobility 512.
112
CP3, Consultation Question 1(2).
113
SAE Taxonomy J3016, para 3.18, Note 3.
114
United Nations Economic Commission for Europe (UNECE) Global Forum for Road Traffic Safety (WP1), proposed resolution on safety considerations for activities other than driving undertaken by the driver when the automated driving system is exercising dynamic control (July 2021) ECE/TRANS/WP.1/2021/2, para 2(c). The proposed resolution is yet to be adopted. Discussions will resume in March 2022 with a view to a possible adoption at that time.
115
UN Regulation 157 on uniform provisions concerning the approval of vehicles with regard to Automated Lane Keeping Systems E/ECE/TRANS/505/Rev.3/Add.156 (ALKS Regulation), para 2.2.
116
The use of Deaf with a capital D refers to people who have been deaf all their lives or since before they learned to talk. “deaf” with use of lower case d refers to anyone with a severe hearing impairment. See the Deaf Health Charity Signhealth: https://signhealth.org.uk/resources/learn-about-deafness/deaf-or-deaf/.
117
CP3, para 4.89, quoting https://www.hearinglink.org/your-hearing/about-hearing/facts-about-deafness-hearing-loss/.
118
See UK Government, Deafness and Driving, https://www.gov.uk/deafness-and-driving.
119
By contrast, those seeking licences to drive buses, coaches or lorries must notify DVLA if they are deaf: see https://www.gov.uk/deafness-and-driving.
120
Oxbotica response to CP3, Consultation Question 2.
121
SAE Taxonomy J3016, Table 2, p 28.
122
SAE Taxonomy J3016, para 5.4.
123
At the end of the transition period the user-in-charge is treated as a driver.
124
CP3, para 4.91.
125
N Kinnear and others, “Safe performance of other activities in conditionally automated vehicles” (TRL, December 2020), published as Appendix A to Department for Transport, Safe Use of Automated Lane Keeping System (ALKS): Summary of Reponses and Next Steps (April 2021), https://www.gov.uk/government/consultations/safe-use-of-automated-lane-keeping-system-on-gb-motorways-call-for-evidence.
126
Strassenverkehrsgesetz (the German Road Traffic Act) (StVG), section 1a. The translation is taken from the Ministry of Digital Infrastructure’s website at https://www.bmvi.de/SharedDocs/EN/Documents/DG/eight-act-amending-the-road-traffic-act.pdf?__blob=publicationFile.
127
French Highway Code, Article 311-1-1(3.2). Official English translation in the notification draft submitted by France to the European Commission on 30 December 2020, ref 2020/852F (France). Available at https://ec.europa.eu/growth/tools-databases/tris/en/search/?trisaction=search.detail&year=2020&num=852.
128
French Highway Code, Article R319-1(I)(3). Official English translation in the notification draft submitted by France to the European Commission on 30 December 2020, ref 2020/852F (France).
129
UNECE Global Forum for Road Traffic Safety (WP1), proposed resolution on safety considerations for activities other than driving undertaken by the driver when the automated driving system is exercising dynamic control (July 2021) ECE/TRANS/WP.1/2021/2, para 3(e).
130
See Ch 5 of the report.
131
See Analysis of Responses to CP3, paras B.28 to B.34.
132
SAE Taxonomy J3016, para 5.4, note 2.
133
SAE Taxonomy J3016, para 5.5, note 1.
134
SAE Taxonomy J3016, para 3.16.
135
SAE Taxonomy J3016, para 3.16, note 3.
136
SAE Taxonomy J3016, para 3.11. The SAE distinguishes between a failure mitigation strategy and a minimal risk condition on the grounds that a failure mitigation strategy “is not part of the fallback function” and “occurs after the ADS has disengaged or been incapacitated by a rare, catastrophic event” (para 8.6).
137
SAE Taxonomy J3016, para 5.4, note 6.
138
SAE Taxonomy J3016, p 32, para 8.6.
139
This is subject to a specific defence where problems in driving have been brought about by the ADS: See Ch 8, paras 8.123 to 8.130.
140
At present, one of UK Government’s principles for introducing AVs on GB roads is that they should be able to cope with existing infrastructure. Existing infrastructure already mitigates the risk of stopping in lane by detecting stops and closing lanes and issuing warnings to motorists. In the future infrastructure could play a more central and interactive role in the overall safety case.
141
SAE Taxonomy, para 5.4.
142
SAE Taxonomy, para 3.17, Example 3.
143
CP3, para 4.103.
144
National Highway Traffic Safety Administration (NHTSA), Tires: see https://www.nhtsa.gov/equipment/tires.
145
Smart Driving, Tyre blowout: see https://smartdriving.co.uk/Driving/Driving_emergencies/blowout.htm.
146
The Strassenverkehrsgesetz (the German Road Traffic Act) (StVG).
147
StVG, as reported in the Federal Law Gazette of 20 June 2017, Part 1 No 38, p 1648.
148
Deutscher Bundesrat, Plenarprotokoll 954. Sitzung, 10.03.2017. The Bundesrat is the upper house of the German parliament. Their response and concerns regarding the introduction of the amendments are available at https://www.bundesrat.de/SharedDocs/downloads/DE/plenarprotokolle/2017/Plenarprotokoll-954.pdf?__blob=publicationFile&v=2.
149
French Highway Code, Article R412-17-1. Official English translation in the notification draft submitted by France to the European Commission on 30 December 2020, ref 2020/852F (France).
150
National Transport Commission (NTC), A national in-service safety law for automated vehicles (May 2021), https://www.ntc.gov.au/sites/default/files/assets/files/NTC-policy-paper-national-in-service-safety-law-for-AVs.pdf, para 12.6.2.
151
CP3, para 4.108.
152
CP3, para 4.111.
153
We explore the difference between dynamic and non-dynamic responsibilities in Chapter 8.
154
We discuss the threshold for safety in Chapter 4 and the authorisation process in Chapter 5.
155
A driver of a traditional vehicle could have difficulty coping with such an event; society tolerates the taking of these remote risks.
156
This test does not match any given SAE Level. It demands more from the automation than SAE Level 3, where the person in the driving seat must remain receptive to evident vehicle system failures, even in the absence of a request to intervene. However, unlike SAE Level 4, requiring the user-in-charge to respond to a clear and timely transition demand may be part of the safety case, if the authorisation agency considers this appropriate in the circumstances.
157
UNECE Global Forum for Road Traffic Safety (WP1), proposed resolution on safety considerations for activities other than driving undertaken by the driver when the automated driving system is exercising dynamic control (July 2021) ECE/TRANS/WP.1/2021/2, para 4(b) and (d).
158
UNECE Global Forum for Road Traffic Safety (WP1), proposed resolution on safety considerations for activities other than driving undertaken by the driver when the automated driving system is exercising dynamic control (July 2021) ECE/TRANS/WP.1/2021/2, paras 4(a); 5(b)(c)(d); and 6(a)(b).
159
In a 2019 poll, for example a third of motorists said they had not read the Highway Code since they took their test and one in five had not read it in 10 years: https://www.thisismoney.co.uk/money/cars/article-6716877/One-five-drivers-havent-picked-Highway-Code-decade.html.
160
Road Traffic Act 1988, s 38(7).
161
Stakeholders expressed particular concerns that users-in-charge would balance screens on their laps, in a way which would cause injury if the airbag deployed.
162
Road Vehicles (Construction and Use) Regulations 1986, reg 110. The emergency exception only applies if the driver is calling 112 or 999 in circumstances where it is unsafe or impracticable to cease driving (reg 110(5)). A further exemption applies for the use of mobile devices for remote parking functions (reg 110(5A)).
163
Road Vehicles (Construction and Use) Regulations 1986, reg 109.
164
For example, under the ALKS Regulation onboard infotainment systems must cut out as soon as there is a transition demand: see para 6.1.4.
165
Road Traffic Act 1988, s 41(1) confers a general power on the Secretary of State to make regulations “as to the use of motor vehicles and trailers on roads, their construction and equipment and the conditions under which they may be so used”.
166
ABI/Thatcham, Defining Safe Automated Driving (September 2019): see
https://www.abi.org.uk/globalassets/files/publications/public/motor/2019/defining-safe-automation-technical-document-aug-2019.pdf.
167
UNECE Global Forum for Road Traffic Safety (WP1), proposed resolution on safety considerations for activities other than driving undertaken by the driver when the automated driving system is exercising dynamic control (July 2021) ECE/TRANS/WP.1/2021/2, para 3(f) and (h).
168
UNECE Global Forum for Road Traffic Safety (WP1), proposed resolution on safety considerations for activities other than driving undertaken by the driver when the automated driving system is exercising dynamic control (July 2021) ECE/TRANS/WP.1/2021/2, para 3(c).
169
ALKS Regulation, para 6.3.1.
170
Mobileye response to CP1.
171
M S Blumenthal, L Fraade-Blanar, R Best and J L Irwin, Safe Enough: Approaches to Assessing Acceptable Safety for Automated Vehicles (RAND Corporation, 2020) (“RAND Report”), p 1, https://www.rand.org/pubs/research_reports/RRA569-1.html.
172
N Kalra and D Groves, The Enemy of Good: Estimating the Cost of Waiting for Nearly Perfect AVs (RAND Corporation, 2017), p ix, https://www.rand.org/content/dam/rand/pubs/research_reports/RR2100/RR2150/RAND_RR2150.pdf.
173
For further discussion of this point, see para 4.37 below.
174
See Analysis of Responses to CP3, Ch C.
175
Consultation Question 4.
176
Out of 89 respondents 22 (25%) thought that the most appropriate standard was as safe as a competent and careful driver and 24 (27%) thought that AVs should be safer than the average driver. Only 5 (6%) explicitly favoured a standard based on fault accidents. The remaining 38 (43%) provided developments of the tests, or alternative approaches.
177
Amnon Shashua, “The Challenge of Supporting AV at Scale” (26 May 2020), https://amnon-shashua.medium.com/the-challenge-of-supporting-av-at-scale-7c06196cced2. There are considerably more road deaths in the US than in GB: see CP1, paras 5.88 to 5.90,
178
For an explanation of SAE Level 2 driver assistance, see Ch 2, paras 2.8. to 2.9.
179
There are six offences of causing death - by dangerous driving (Road Traffic Act 1988 (RTA 1988), s 1); careless driving (RTA 1988, s 2B); careless driving under the influence of drink or drugs (RTA, s 3A), or while uninsured, unlicensed or disqualified (RTA 1988, ss 3ZB(a) and 3ZC). There are two offences of causing serious injury - by dangerous driving (RTA 1988, s 1A) and driving while disqualified (RTA 1988, s 3ZD). There is also an offence of “aggravated vehicle taking” under the Theft Act 1968, s 12A in England and Wales, which may be aggravated in various ways, including by death or injury.
180
In response to such calls, the Police, Crime, Sentencing and Courts Bill, currently before Parliament, introduces maximum life sentences for causing death by dangerous driving, and by careless driving under the influence of drink or drugs. It also introduces a new offence of causing serious injury by careless driving: see https://bills.parliament.uk/bills/2839.
181
For example, in the 10 years between 2009 to 2018, 3,214 people were imprisoned in England and Wales for offences of causing death or serious injury by driving. This included 1,357 people imprisoned for causing death by dangerous driving and 1,027 imprisoned for causing serious injury by dangerous driving. Ministry of Justice, Criminal justice system statistics quarterly: outcomes by offence data tool (2018), https://www.gov.uk/government/statistics/criminal-justice-system-statistics-quarterly-december-2018.
182
ABI/Thatcham response to CP3, Consultation Question 4.
183
For a discussion of these issues, see CP1, paras 5.89 to 5.97.
184
For further discussion of this issue, see CP3, paras 5.69 to 5.78.
185
For the period December 2019 to November 2020 California’s disengagement reports show that Cruise vehicles drove 770,000 miles; and Waymo vehicles 629,000 miles; see Steve Crowe, “Cruise, Waymo lead way in Calif. autonomous vehicle testing” (The Robot Report, 10 February 2021), https://www.therobotreport.com/cruise-waymo-lead-way-calif-autonomous-vehicle-tests/. Cumulatively Waymo vehicles have driven more than 20 million miles; see Reuters, “Waymo self-driving vehicles cover 20 million miles on public roads” (7 January 2020), https://www.reuters.com/article/us-autonomous-waymo-idUSKBN1Z61RX.
186
Mathematic modelling demonstrates, for example, that based on fatalities alone, it would take 8.8 billion miles of driving to show with 95% confidence that automated driving had 20% fewer fatalities than the average US rate: see RAND Corporation, Driving to Safety: How many miles of driving would it take to demonstrate autonomous vehicle reliability? (2016), https://www.rand.org/content/dam/rand/pubs/research_reports/RR1400/RR1478/RAND_RR1478.pdf.
187
Mobileye has conducted a similar calculation; to reduce the fatality rate by three orders of magnitude would require testing in the order of thirty billion miles: S Shalev-Shwartz, S Shammah and A Shashua, “On a Formal Model of Safe and Scalable Self-driving Cars” (Mobileye, 2017), https://arxiv.org/pdf/1708.06374.pdf, p 4.
188
See, for example, the Analysis of Responses to CP1, paras 2.12 to 2.15 and Analysis of Responses to CP3, paras C.126 to C.132 and D.26.
189
Equality Act 2010, s 149.
190
CP1, paras 5.86 to 5.97.
191
CP3, para 10.76.
192
R (X) v Tower Hamlets London Borough Council [2013] EWHC 480 (Admin), [2013] All ER 157, [35], by Males J (when he was a High Court judge).
193
R (Munjaz) v Mersey Care NHS Trust [2005] UKHL 58, [2006] 2 AC 148, [21], by Lord Bingham and [68] -[69] by Lord Hope.
194
R (Munjaz) v Mersey Care NHS Trust [2005] UKHL 58, [2006] 2 AC 148, [21], by Lord Bingham and [68] -[69] by Lord Hope; R (X) v Tower Hamlets London Borough Council [2013] EWHC 480 (Admin), [2013] All ER 157, [35], by Males LJ (when he was a High Court judge). Similarly, failure to follow a published policy is an established ground of judicial review: R (Lumba) v Secretary of State for the Home Department [2011] UKSC 12, [2012] 1 AC 245, [26], by Lord Dyson, [202], by Lady Hale and [313], by Lord Phillips; R (Lee-Hirons) v Secretary of State for Justice [2016] UKSC 46, [2017] AC 52, [17], by Lord Wilson and [50], by Lord Reed.
195
Ch 6, paras 6.28 to 6.37.
196
The regulation of vehicle standards is described in detail in CP3, Ch 6.
197
Subject to the Vienna Convention on Road Traffic 1968, discussed in CP1, paras 2.48 to 2.54.
198
UN Regulation 157 on uniform provisions concerning the approval of vehicles with regard to Automated Lane Keeping Systems E/ECE/TRANS/505/Rev.3/Add.156 (ALKS Regulation).
199
See discussion below at paras 5.26 to 5.34.
200
In the United States, Waymo currently run automated passenger services in the city of Phoenix, Arizona. The vehicles it uses are Chrysler Pacifica vehicles which Waymo has adapted with automated technologies. Uber has used Volvo vehicles in the past to trial automated vehicles technologies.
201
We also proposed that those seeking approval should be required to specify the type of vehicle in which their system is installed and give detailed information about how it would be installed in that type of vehicle.
202
For example, Articles 3 and 4 of the ALKS Regulation make clear that approval is to be granted to a type of vehicle with regard to its ALKS not the ALKS itself. UN Regulations for other vehicle systems are the same.
203
We feel it is now misleading to refer to the entity taking responsibility for the AV after stage 2 as an Automated Driving System Entity (ADSE), when in fact, they will take responsibility for the self-driving vehicle as a whole. To this end, we now refer to this entity as an Authorised Self-Driving Entity (ASDE).
204
eCall telephones emergency services following a major collision. Other significant “EU only” regulations relate (for example) to registration plates and vehicle identification; wheel guards; tyre installation; the refrigerant in air conditioning systems; and gear shift indicators. For further discussion, see CP3, paras 6.11 to 6.15 and 6.40 to 6.43.
205
The scheme currently covers vehicles in categories L (Motorcycles and quadricycles) ,M (Passenger vehicles), N (Goods Vehicles) and T (Agricultural and Forestry Tractors):see https://www.vehicle-certification-agency.gov.uk/vehicle-type-approval/issuing_gb_type_approval/.
206
Vehicle Certification Agency, “Issuing GB type approval” (3 August 2021): see https://www.vehicle-certification-agency.gov.uk/vehicle-type-approval/issuing_gb_type_approval/.
207
See para 5.41.
208
Art 3(2) of the revised 1958 agreement, prohibits “any further testing, documentation, certification or marking” concerning a UNECE approval.
209
See Figure 5.1.
210
UN Regulation 157 on uniform provisions concerning the approval of vehicles with regard to Automated Lane Keeping Systems E/ECE/TRANS/505/Rev.3/Add.156 (ALKS Regulation), as discussed in Ch 2.
211
As discussed in Ch 6. The EU provisions are now in art 39 of Regulation 2018/858 (and were formerly in art 20 of the Framework Directive). The UNECE procedure is in art 12.6 and sch 7 of the revised 1958 agreement.
212
We discuss this test in detail in Ch 3. We discuss what it means for an AV to be safe in Ch 4.
213
They would be a user-in-charge. See Ch 8.
214
The explanatory memorandum to the amendment to the Vienna Convention on Road Traffic, available in the Report of the Global Forum for Road Traffic Safety on its eighty-first session (December 2020) ECE/TRANS/WP.1/173, Annex 2, para 8. The ‘Vienna Convention’ refers to the Vienna Convention on Road Traffic 1968, which is administered by the UNECE.
215
See Ch 2, paras 2.41 - 2.43 and Figure 2.2 which set out the ASDE’s role.
216
See Figure 7.1
217
Under the ALKS Regulation, para 5.1.2, the type approval authority must verify that the system complies with “traffic rules” in all intended countries of operation.
218
Revised 1958 agreement, art 1. Additionally, if the UK decided the safety of AVs on British roads warranted a much more serious option, it could cease applying one or all UN Regulations under article 1 of the revised 1958 agreement - provided the decision was compatible with any obligations arising under the UK’s trade agreements.
219
As discussed in Ch 2, the SAE Taxonomy J3016 accommodates the possibility that an AV might have different “features” with different functionality depending on its ODD (para 3.7).
220
T Kelley, “Arguing Safety - A systematic Approach to managing safety cases” (1998) University of York PhD thesis, p 22.
221
CP3, paras 17.8 to 17.26. We understand that efforts are now underway at a UNECE level to increase the number of events that can potentially trigger an EDR: see for example the proposal for the 01 series of amendments to the UN Regulation on Event Data Recorders (ECE/TRANS/WP.29/2021/58) at https://unece.org/transport/documents/2021/01/working-documents/grsg-proposal-01-series-amendments-un-regulation-no
222
CP3, paras 17.20 to 17.26
223
Such as those in which an air bag has not been deployed.
224
Good repute is also a requisite condition of air operator and railway undertaking licences, granted by the Civil Aviation Authority (CAA) and Office of Rail and Road (ORR) respectively: Regulation on common rules for the operation of air services (EC) No 1008/2008, Official Journal L 293 of 31.10.2008 p 3; Railway (Licensing of Railway Undertakings) Regulations 2005, SI No 3050, s 6(7).
225
The power of the senior traffic commissioner to give guidance and directions is provided for by section 4C of the Public Passenger Vehicles Act 1981. See Senior Traffic Commissioner, Statutory Document No 2: Finance (October 2021):
https://assets.publishing.service.gov.uk/government/uploads/system/uploads/attachment_data/file/1025773/ Stat_Doc_2_Finance_-_Version_15.0.pdf.
226
Senior Traffic Commissioner, Statutory Document No 1: Good Repute and Fitness (October 2021): see https://assets.publishing.service.gov.uk/government/uploads/system/uploads/attachment_data/file/1025761/ STATDO_1.PDF.
227
Goods Vehicles (Licensing of Operators) Act 1995, sch 3 para 2; Public Passenger Vehicles Act 1981, sch 3 para 1(3). For the meaning of “serious offence” see the Goods Vehicles (Licensing of Operators) Act 1995, sch 3 para 3 and the Public Passenger Vehicles Act 1981, sch 3 para 1(4). For the meaning of “road transport offence”, see the Goods Vehicles (Licensing of Operators) Act 1995, sch 3 para 4 and the Public Passenger Vehicles Act 1981, sch 3 para 3(5).
228
Goods Vehicles (Licensing of Operators) Act 1995, sch 3 para 1(1); Public Passenger Vehicles Act 1981, sch 3 para 1(9).
229
Goods Vehicles (Licensing of Operators) Act 1995, sch 3 para 1(1)(a) and (2)(a); Public Passenger Vehicles Act 1981, sch 3 para 1(1)(a) and 1(2)(a). “Relevant convictions” for the purposes of the Goods Vehicles (Licensing of Operators) Act 1995 are defined in schedule 2, paragraphs 4 and 5 and broadly cover road safety, fitness to hold a licence and environmental protection. A “relevant conviction” for the purposes of the Public Passenger Vehicles Act 1981 is defined in section 82 and means is a conviction (other than a spent conviction) of an offence prescribed for the purposes of the Act, or an offence under the law of Northern Ireland or any other territory outside the UK corresponding to such an offence.
230
Goods Vehicles (Licensing of Operators) Act 1995, sch 3 para 1(1); Public Passenger Vehicles Act 1981, sch 3 para 1(9).
231
See Ch 6, paras 6.149 to 6.154 for our recommendation that there be a specialist road collision unit to investigate accidents involving AVs.
232
89% of those who responded agreed and only 1% disagreed. For further discussion, see Analysis of Responses to CP3, para E.62.
233
Response by KPMG to CP3, Consultation Question 14.
234
The standard of safety required is discussed in Chapter 4.
235
UN Regulation 155 on uniform provisions concerning the approval of vehicles with regards to cybersecurity and cyber security management system E/ECE/TRANS/505/Rev.3/Add.154 (the Cybersecurity Regulation) and UN Regulation 156 on uniform provisions concerning the approval of vehicles with regards to software updates and software update management system E/ECE/TRANS/505/Rev.3/Add.155 (the Software Update Regulation) require manufacturers to maintain these systems as a condition of approval under these regulations. For approvals under the Cybersecurity Regulation there is the fundamental requirement that the manufacturer keep the vehicle cyber-secure throughout its lifetime and for the approval authority to oversee this.
236
Under the terms of the Northern Ireland Protocol, EU Regulation 2018/858 will continue to apply in Northern Ireland.
237
See, for example, the Secretary of State’s regulation making powers under sections 45 and 54 of the Road Traffic Act 1988.
238
UN Regulation 157 on uniform provisions concerning the approval of vehicles with regard to Automated Lane Keeping Systems E/ECE/TRANS/505/Rev.3/Add.156 (ALKS Regulation), Annex 4, para 3.5.4.
239
L Fraade-Blanar and others, Measuring Automated Vehicle Safety: Forging a Framework (RAND Corporation, 2018): see https://www.rand.org/pubs/research_reports/RR2662.html. For discussion, see CP3 paras 10.66 to 10.71. See also Automated Vehicle Safety Consortium, Best Practice for Metrics and Methods of Assessing Safety Performance of Automated Driving Systems (ADS) (June 2021), https://avsc.sae-itc.org/principle-6-5471WV-46540KJ.html?respondentID=30123780#Read-More.
240
Please see Ch 2 at para 2.43 for the rationale behind this change.
241
CP3, para 11.18.
242
See Ch 5, paras 5.93 to 5.94, 5.96 and 5.100.
243
See Ch 11, paras 11.19 to 11.21.
244
CP3, para 4.72.
245
Responses were to Consultation Question 18 which asked whether there should be an in-use scheme and outlined its responsibilities and powers. Out of 65 responses to this question, 51 (78%) consultees who replied agreed and only one disagreed.
246
Criminal Liability in Regulatory Contexts: A Consultation Paper (2010) Law Commission Consultation Paper No 195.
247
General Product Safety Regulations 2005 (GPSR), reg 15(1).
248
GPSR, reg 15(4).
249
GPSR, reg 11.
250
GPSR, reg 12. The authority can also “make the marketing of the product subject to prior conditions”.
251
GPSR, reg 14.
252
GPSR, reg 17.
253
DVSA code of practice, para 7.1
254
Criminal Liability in Regulatory Contexts: A Consultation Paper (2010) Law Commission Consultation Paper No 195.
255
Richard Macrory, Regulatory Justice: Making Sanctions Effective Final Report (November 2006), https://webarchive.nationalarchives.gov.uk/20121205164501/http:/www.bis.gov.uk/files/file44593.pdf, para 1.11.
256
Financial Services and Markets Act 2000, s 207.
257
Financial Conduct Authority, The Decision Procedure and Penalties manual, (December 2020) https://www.handbook.fca.org.uk/handbook/DEPP.pdf.
258
In CP1 and CP3 we referred to these as “fines”. We now refer to civil penalties to clarify that they are to be imposed by the regulator, not the criminal courts.
259
Department for Business, Innovation and Skills (Better Regulation Delivery Office): Regulator’s Code (April 2014), para 6.
260
Data Protection Act 2018, s 157; Wireless Telegraphy Act 2006, ss 32D, 43, 53F and 53L; Communications Act 2003, ss 35A, 41, 96B, 97, 105T, 105Z19, 130, 139ZA, 198ZA, 237, 332, 341, 345, 368J, 368Z4 and sch 13; Gas Act 1986, s 30O; Electricity Act 1989, s 27O.
261
Civil Penalty Amounts, 86 Fed Reg 23243 (3 May 2021) (to be codified at 49 USC § 30165(a)(1) and (3)).
262
Ofgem, 9 August 2019 power outage report (3 January 2020), https://www.ofgem.gov.uk/publications/investigation-9-august-2019-power-outage, p 37.
263
Ofgem, Enforcement Guidelines (2017), https://www.ofgem.gov.uk/system/files/docs/2017/10/enforcement_guidelines_october_2017.pdf, p 60.
264
An order could be directed at a specified category of consumers (eg all consumers served by a particular company) or an appropriate charity or trust or organisation whose objectives make it a suitable proxy for consumers who might have been directly affected.
265
A software regression occurs where a feature that worked before stops working, typically after a system upgrade.
266
See Ch 7 for our recommendations about communications regarding unauthorised systems.
267
Railways (Interoperability) Regulations 2011, reg 4(1) Railways and Other Guided Transport Systems (Safety) Regulations, reg 3(1).
268
Office of Road and Rail (ORR), “Safety certificates and safety authorisations”:
https://www.orr.gov.uk/guidance-compliance/rail/health-safety/laws/rogs/certificates-authorisations.
269
Railways and Other Guided Transport Systems (Safety) Regulations 2006, reg 15(3).
270
We note that informal working papers of the UNECE VMAD group have also suggested the need for inservice authorities to be able to withdraw/suspend and ADS from the market. See VMAD-SG3-13-02 and VMAD-SG3-13-03 at https://globalautoregs.com/groups/160-vmad-sg3.
271
Richard Macrory, Regulatory Justice: Making Sanctions Effective Final Report (November 2006), https://webarchive.nationalarchives.gov.uk/20121205164501/http:/www.bis.gov.uk/files/file44593.pdf.
272
Richard Macrory, Regulatory Justice: Making Sanctions Effective Final Report (November 2006), https://webarchive.nationalarchives.gov.uk/20121205164501/http:/www.bis.gov.uk/files/file44593.pdf para 4.39.
273
Christine Parker, “Restorative Justice in Business Regulation? The Australian Competition and Consumer Commissions Use of Enforceable Undertakings” (2004) 67(2) Modern Law Review, 222.
274
In the criminal context the Restorative Justice Council recommends that for any kind of communication to take place, the offender must have admitted to the crime, and both victim and offender must be willing to participate. Restorative justice can be used for any type of crime and at any stage of the criminal justice system, including alongside a prison sentence. See https://restorativejustice.org.uk/about-restorative-justice.
275
Data Protection Act 2018, s 162(1).
276
Competition Act 1998, ss 46(1) and (2) and 59(1) and Part 4 of the Enterprise Act 2002 in respect of a market investigation reference.
277
Police and Criminal Evidence Act 1984, s 8.
278
Police and Criminal Evidence Act 1984, s 23. A constable may seize anything in the vehicle which “he has reasonable grounds for believing is evidence in relation to an offence” and might be “concealed, lost, altered or destroyed”: s 19(3). This would include the right to download electronic data from the vehicle: s 19(4).
279
Search Warrants (2020) Law Com No 396, ch 19.
280
Road Vehicles (Approval) Regulations 2020 SI No 818, sch 4 para 10; Transport Act 1968, ss 99, 99ZB and 99ZF; Public Service Vehicles (Enforcement Powers) Regulations 2009 No 1964, reg 3(1); Goods Vehicles (Licensing of Operators) Act 1995, ss 41, 42 and sch 5 para 3.
281
Search Warrants (2018) Law Commission Consultation Paper No 235, para 11.59.
282
The proposed alterations to the Highway Code, a table of proposed changes and an explanatory memorandum were laid before Parliament on 1 December 2021 and are available at:
https://www.gov.uk/government/consultations/review-of-the-highway-code-to-improve-road-safety-for-cyclists-pedestrians-and-horse-riders#history.
283
For a summary of the proposals, see https://www.gov.uk/government/consultations/review-of-the-highway-code-to-improve-road-safety-for-cyclists-pedestrians-and-horse-riders/summary-of-the-consultation-proposals-on-a-review-of-the-highway-code.
284
Proposed alterations to Highway Code (December 2021), p 13:
https://assets.publishing.service.gov.uk/government/uploads/system/uploads/attachment_data/file/1041273/t he-highway-code-alteration-to-the-highway-code.pdf.
285
GB Highway Code Rule 163.
286
RAC Foundation, Department for Transport and National Highways, Road Collision Investigation Project (RCIP): see https://www.racfoundation.org/collaborations/road-collision-investigation-project.
287
Department for Transport, Open Consultation: Creating a Road Collision Investigation Branch (RCIB) (28 October 2021): see https://www.gov.uk/government/consultations/creating-a-road-collision-investigation-branch-rcib.
288
UN Regulation 155 on uniform provisions concerning the approval of vehicles with regards to cybersecurity and cyber security management system E/ECE/TRANS/505/Rev.3/Add.154, para 5.1.1 (a) - (e).
289
We would also expect that where the provisions of UN Regulation 155 on cybersecurity appear to be broken, the in use-regulator would also refer the issue to the original Regulation 155 approval authority and the authorising authority.
290
In response to CP1, Consultation Question 8(2): out of 121 respondents answering this question, 109 (90%) agreed, only 3 disagreed, and 9 answered “other”. See Analysis of Responses to CP1, para 4.30. In response to CP3, Consultation Question 9(1): out of 76 responses, 65 (86%) agreed. The full analysis of responses is published alongside the report.
291
Summary of responses to CP3 and next steps, para C.18.
292
The SAE Taxonomy defines the term “driving automation technology” as “the hardware and software that are collectively capable of performing part or all of the DDT on a sustained basis: this term is used generically to describe any system capable of Level 1 to 5 driving automation”: Society of Automotive Engineers International (SAE), J3016 Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles (April 2021) (SAE Taxonomy J3016), para 3.6.
293
Thatcham Research, Euro NCAP & Global NCAP, #TestingAutomation (October 2018), https://www.thatcham.org/automated-driving-hype-is-dangerously-confusing-drivers-study-reveals/.
294
This issue has been coined “autonowashing” by Liza Dixon, https://www.sciencedirect.com/science/article/pii/S2590198220300245.
295
In the unlikely event that future United Nations Economic Commission for Europe (UNECE) regulations allow driving automation technologies which the UK determines not to be safe at all (even with a traditional driver), the UK can resort to the dispute resolution procedure, as discussed at paras 5.56 to 5.58.
296
Consumer Protection from Unfair Trading Regulations 2008 (CPRs) (SI 2008 No 1277), sch 1, para 2. This is a criminal offence under reg 12.
297
CPRs, reg 5(2)(a).
298
§ 228.28 of the California Code of Regulations, Title 13, Division 1, Chapter 1, Article 3.8(a).
299
§ 228.28 of the California Code of Regulations, Title 13, Division 1, Chapter 1, Article 3.8(b).
300
See https://asia.nikkei.com/Business/Automobiles/China-s-auto-industry-calls-for-standardized-self-driving-claims.
301
In 2020 the Centre for Protection against Unfair Competition (Wettbewerbszentrale) took action against Tesla for its use of the word “autopilot”. The Centre argued that the term, taken with associated marketing material, misled customers into believing that the vehicles could drive autonomously. The District Court Munich I (Landgericht Munchen I) agreed and banned Tesla from repeating misleading claims: see https://www.bbc.co.uk/news/technology-53418069.
302
See https://www.bbc.co.uk/news/technology-44225059.
303
CPRs, reg 2.
304
SAE Taxonomy J3016, para 3.5.
305
See Ch 5.
306
As defined at para 7.36.
307
SAE Taxonomy J3016, para 7; ABI/Thatcham, Defining Safe Automated Driving: Insurer Requirements for Highway Automation (September 2019),
https://www.abi.org.uk/globalassets/files/publications/public/motor/2019/defining-safe-automation-technical-document-aug-2019.pdf; for further discussion, see Ch 2 on key concepts.
308
For example, Autonomous Emergency Braking or “AEB”: see https://www.thatcham.org/what-we-do/car-safety/autonomous-emergency-braking/.
309
See, for example, SMMT’s guiding principles for marketing automated vehicles developed and agree by CCAV’s AV DRiVE working group: https://www.smmt.co.uk/2021/11/smmt-publishes-guiding-principles-for-marketing-automated-vehicles/; Zenzic/Thatcham automated driving system consumer ratings: see https://news.thatcham.org/pressreleases/zenzic-and-thatcham-research-reveal-plans-for-automated-driving-system-consumer-ratings-3127080; ABI/Thatcham, Defining Safe Automated Driving: Insurer Requirements for Highway Automation (September 2019), https://www.abi.org.uk/globalassets/files/publications/public/motor/2019/defining-safe-automation-technical-document-aug-2019.pdf; Euro NCAP assisted driving tests: see https://www.euroncap.com/en/vehicle-safety/safety-campaigns/2020-assisted-driving-tests/.
310
https://www.thatcham.org/automated-driving-hype-is-dangerously-confusing-drivers-study-reveals/.
311
See for example the case of Comma.ai which marketed a $1,000 after-market kit called Comma One in 2016 which it claimed was capable of adding semi-autonomous capabilities to conventional cars. The kit was withdrawn after the National Highway Traffic Safety Administration (NHTSA) threatened the company with a fine of up to $21,000 per day unless it proved the safety of the self-driving feature. See https://www.businessinsider.com/george-hotz-comma-ai-shuts-down-driverless-car-project-2016-10?r=US&IR=T.
312
See, for example, the Automated Vehicle Safety Consortium’s (AVSC) Best Practice for in-vehicle fallback test driver (safety operator) selection, training, and oversight procedures for automated vehicles under test, (AVSC00001201911), published 8 November 2019, which addresses the qualifications and training for onboard human oversight of testing for automated driving system (ADS)-operated vehicles.
313
SI 2009 No 2890, reg 6.
314
An alternative approach which may be useful for drafting purposes is for the offence to apply only to advertising intended to come to the attention of persons in Great Britain. See Gambling Act 2005, s 333(4).
315
Enterprise Act 2002, s 217.
316
Enterprise Act 2002, s 219.
317
Enterprise Act 2002, s 211(1) for domestic infringements, s 212(1) for Schedule 13 infringements.
318
Enterprise Act 2002, ss 215 and 217.
319
Above, s 218.
320
Above, s 219.
321
Above, s 220.
322
Granted under the Consumer Rights Act 2015, sch 5.
323
Business Protection from Misleading Marketing Regulations 2008 (BPRs) (SI 2008/1276), reg 15.
324
BPRs, regs 16 and 18.
325
BPRs, regs 3, 13(1) and 13(4).
326
As discussed in Ch 2, an ADS “feature” is a combination of software and hardware which allows a vehicle to drive itself in a particular operational design domain (such as a motorway).
327
Of the 139 respondents who answered this question, 110 (79%) agreed, 23 (17%) answered “other” and 6 (4%) disagreed.
328
CP3, paras 12.17 to 12.20.
329
Of the 79 respondents who answered this question, 37 (47%) agreed, 38 (48%) answered “other” and 4 (5%) disagreed.
330
See Road Vehicles (Construction and Use) Regulations 1986, reg 110(5A).
331
CP3, paras 12.8 to 12.10.
332
CP3, Consultation Question 31 at para 12.53. This reflected a similar proposal in CP1, Consultation Question 25 at para 7.46.
333
Road Traffic Act 1988, s 87(1).
334
Road Traffic Act 1988, s 103(1)(b).
335
Road Traffic Act 1988, s 92(10).
336
Road Traffic Act 1988, s 96(1).
337
Road Traffic Act 1988, s 4(1). See also the offence of “being in charge of” a vehicle under the influence of drink or drugs, Road Traffic Act 1988, s 4(2).
338
Road Traffic Act 1988, s 5(1)(a). See also the offence of “being in charge of” a vehicle with alcohol concentration above the prescribed limit, s 5(1)(b).
339
Road Traffic Act 1988, s 5A(1)(a). See also the offence of “being in charge of” a vehicle with concentration above the specified limit, s 5A(1)(b). There is a defence under s 5A(3) if the drug was used in accordance with medical advice.
340
See Road Traffic Act 1988, s 4(2); s 5(1)(b) and s 5A(1)(b). Although the concept of being “in charge” of a vehicle may cover a user-in-charge, we did not wish to rely on case law developed in a different context to cover the new challenges of automated driving.
341
Of the 71 respondents who answered this question, 59 (83%) agreed, 10 (14%) answered “other” and 2 (3%) disagreed.
342
Road Traffic Act 1988, s 87(2).
343
CP3, para 12.51.
344
Lloyd v Singleton [1953] 1 QB 357 at p 359.
345
Lloyd v Singleton [1953] 1 QB 357 at p 359.
346
See CP1, para 7.43. Indictable offences are subject to an identical provision under the Accessories and Abettors Act 1861, s 8.
347
Criminal Procedure (Scotland) Act 1995, s 293(2). The Scots common law principle of “art and part” liability may also apply, though it is uncertain whether this covers strict liability offences - see Stair Memorial Encyclopaedia, Criminal Law (2nd Reissue 2005) at para 129.
348
Pope v Minton [1954] Crim LR 711.
349
Valentine v Mackie 1980 SLT (Sh Ct) 122. After the two had attended a German beer festival together the previous evening, the accused had allowed the learner driver to take over driving under his supervision shortly after collecting him from his home.
350
CP3, Consultation Question 32. We first proposed this offence in CP1, Consultation Question 26.
351
Of the 70 respondents who answered this question, 44 (63%) agreed, 20 (29%) answered “other” and 6 (9%) disagreed.
352
The CertiCAV team at Connected Places Catapult. See also responses by KPMG, DAC Beachcroft and Burges Salmon.
353
Weightmans.
354
Richard Morris, Andrew Catlin.
355
Andrew Catlin.
356
This test was preferred by the International Underwriting Association (IUA), Urban Transport Group (UTG), Kennedys Law, HORIBA MIRA, the Senators of the College of Justice, and Dean Hatton (an individual respondent associated with the National Police Chiefs’ Council).
357
This point was made by the IUA, UTG and Dean Hatton (an individual respondent associated with the National Police Chiefs’ Council).
358
These are the judges sitting in the Supreme Courts in Scotland (the Court of Session and the High Court of Justiciary).
359
Ch 9, paras 9.82 to 9.87.
360
CP3, para 12.42.
361
Under Road Traffic Act 1988, s 97(3)(a), provisional licences are granted subject to prescribed conditions.
Section 120(1) then confers powers on the Secretary of State to prescribe conditions.
362
Article 1 of Order 2021-443. We have not found an official translation. Article 1 could be read as follows: “Art. L. 123-1.-The provisions of the first paragraph of Article L. 121-1 do not apply to the driver, for offences resulting from a manoeuvre of a vehicle whose driving functions are delegated to an automated driving system, when this system exercises, at the time of the facts and under the conditions provided in Article I. 319-3, the dynamic control of the vehicle”.
363
Art. L. 123-2.
364
CP3, para 2.20.
365
Some offences apply only to drivers; others apply variously to users, “a person in charge of a motor vehicle” or “a person who parks”. For details of 70 common offences, see updated Background Paper A. Road Traffic Regulation Act 1985, s 5 applies to “a person who contravenes” a traffic regulation order, which includes both dynamic and non-dynamic offences, depending on the order in question.
366
Road Traffic Act 1988, s 15.
367
Motorways Traffic (England and Wales) Regulations 1982, regs 3(3) and 7(1).
368
United Nations Economic Commission for Europe (UNECE) Global Forum for Road Traffic Safety (WP1), Resolution on the Deployment of Highly and Fully Automated Vehicles in Road Traffic (20 September 2018), para 4(e).
369
Contrary to the Road Traffic Act 1988, s 143(1).
370
See for example, responses from KPMG and the British Parking Association, discussed in Analysis of Responses to CP3, paras H.137 to H.141.
371
See Motorways Traffic (England and Wales) Regulations 1982, reg 9 and Motorways Traffic (Scotland) Regulations 1995, regs 8 and 6(2) and (3),
372
See City of Bradford Metropolitan District Council v Obaid [2001] EWHC Admin 536, [2001] LLR 451 and Rodgers v Taylor [1987] RTR 86.
373
Schwarz v London Borough of Camden (17 December 2001) London Parking Tribunal (unreported).
374
Strong v Dawtry [1961] 1 WLR 841.
375
In many cases, users are not liable if there is a good reason for the stop. For example, under the Motorway Regulations, users may remain at rest on a hard shoulder in specified circumstances such as breakdown, accident or illness. The same exceptions will also apply to a user-in-charge. See Motorways Traffic (England and Wales) Regulations 1982, reg 7(2) and Motorways Traffic (Scotland) Regulations 1995, reg 6(2).
376
Road Traffic Act 1988, s 170.
377
See Analysis of Responses to CP3, para H.143.
378
[1948] 1 KB 695, later approved by the Court of Appeal in Selby v Chief Constable of Avon and Somerset [1988] RTR 216. A driver cannot claim lack of awareness if that deficiency was caused by voluntary intoxication: Magee v CPS [2014] EWHC 4089. A driver will have awareness if within 24 hours they were told of the accident or noticed a dent in the vehicle: DPP v Drury [1989] RTR 165. Although we have not found any specific Scottish authority on the point, we understand that the Scottish courts take a similar approach.
379
For further discussion of the offence, see Background Paper A. In 2018 the Department for Transport issued a consultation paper proposing to abolish the requirement to report accidents in person at the police station. We have been told that this was generally welcomed and that the Government intends to proceed with the proposals in due course.
380
One issue is the exception in section 170(1)(a), by which the section does not apply if only the vehicle was damaged and/or only the driver was injured. We hope that users-in-charge will report injuries to themselves, but they should not be criminally liable for failing to do so.
381
Road Vehicles (Construction and Use) Regulations 1986, reg 80.
382
Road Vehicles (Construction and Use) Regulations 1986, reg 82(2).
383
Road Vehicles (Construction and Use) Regulations 1986, reg 82(4).
384
Agreement concerning the International Carriage of Dangerous Goods by Road (adopted 30 September
1957, entered into force 29 January 1968) ECE/TRANS/300, Vols I and II and Corr 1 and 2 (ADR), para 1.4.1.1.
385
ADR, para 1.4.2.
386
ADR, para 1.4.1.2.
387
For example, under section 34 of the Road Traffic Act 1988, it is an offence to drive a mechanically propelled vehicle on common land, moorland, a footway, bridleway or restricted byway In England, the Highway Act 1835, s 72 also prohibits driving a motor vehicle (or carriage) along a footway.
388
The ISO standard for Low Speed Automated Driving (LSAD) systems achieves a similar effect by predefining a route in terms of length and curvature but not width: this distinguishes between decisions about which road to take, and which part of the road to take.
389
ADR, para 1.9.5.
390
There are six offences of causing death - by dangerous driving (Road Traffic Act 1988, s 1); careless driving (Road Traffic Act 1988, s 2B); careless driving under the influence of drink or drugs (Road Traffic Act 1988, s 3A), or while uninsured, unlicensed or disqualified (Road Traffic Act 1988, ss 3ZB(a) and 3ZC). There are two offences of causing serious injury - by dangerous driving (Road Traffic Act 1988, s 1A) and driving while disqualified (Road Traffic Act 1988, s 3ZD).
391
1986 82 Cr. App. R 333; [1986] RTR 49.
392
Wilkinson’s Road Traffic Offences (30th Edition, 2021), para 5-15.
393
Wilkinson’s Road Traffic Offences (30th Edition, 2021), para 5-15.
394
Road Traffic Offenders Act (RTOA)1988, sch 2, para 1. In addition, it carries an unlimited fine and (except in exceptional circumstances) obligatory disqualification: RTOA 1988, s 34 and sch 2, para 1.
395
RTOA 1988, sch 2, para 1. If committed in respect of a goods vehicle or a vehicle adapted to carry more than eight passengers, the punishment is a fine of any amount: RTOA 1988, sch 2, para 1, read together with the Legal Aid, Sentencing and Punishment of Offenders Act, s 85, the Criminal Justice Act 1982, s 37 and the Sentencing Act 2020, s 122.
396
CP3, para 12.62.
397
Of the 71 respondents who answered this question, 54 (76%) agreed, 14 (20%) answered “other” and 3 (4%) disagreed.
398
Response by HORIBA MIRA.
399
For a review of the literature in this area, see N Kinnear and others, “Safe performance of other activities in conditionally automated vehicles” (TRL, December 2020), para 3.4, published as Appendix A to Department for Transport, Safe Use of Automated Lane Keeping System (ALKS): Summary of Reponses and Next Steps (April 2021), https://www.gov.uk/government/consultations/safe-use-of-automated-lane-keeping-system-on-gb-motorways-call-for-evidence.
400
As suggested by Burges Salmon, SMMT and Five AI.
401
As suggested by Faculty of Advocates, British Insurance Lawyers’ Association, HORIBA MIRA, Senators of the College of Justice, Scarlett Milligan.
402
We discuss this issue in depth in Ch 3, paras 3.36 to 3.44.
403
In England and Wales, the Motorways Traffic (England and Wales) Regulations 1982, reg 7. In Scotland, the Road Traffic Regulation Act 1984, s 17(4) as read with the Motorways Traffic (Scotland) Regulations 1995, reg 6(1).
404
This issue was also highlighted by: Bryan Reimer of the Massachusetts Institute of Technology (MIT); FirstGroup; the IUA; the Motor Insurers’ Bureau; and Oxbotica.
405
Criminal Liability: Insanity and Automatism (2013) Law Commission Discussion Paper, para 1.41.
406
Criminal Liability: Insanity and Automatism (2013) Law Commission Discussion Paper, para 1.42.
407
R v Quick [1973] QB 910.
408
R v Hennessy [1989] 1 WLR 287.
409
R v Sullivan [1984] AC 156.
410
R v Burgess [1991] 2 QB 92.
411
Criminal Liability: Insanity and Automatism (2013) Law Commission Discussion Paper, para 1.62.
412
Once a defendant adduces sufficient evidence to put a (sane) automatism defence in issue, the prosecution must prove that the defendant was not suffering from automatism. However, defendants seeking to rely on insanity must prove on the balance of probabilities that they were insane, in order to displace the presumption of sanity: R v Sullivan [1984] AC 156.
413
Trial of Lunatics Act 1883, s 2, as amended by the Criminal Procedure (Insanity) Act 1964.
414
Criminal Procedure (Insanity) Act 1964, s 5.
415
The current requirements for the defence of automatism sit uneasily with the proposition, affirmed in Alexander v Dunn 2016 JC 125 at para. [4], that involuntary actions cannot form the basis for a conviction of a driving offence. Alexander involved a driver with no medical condition being convicted of dangerous driving through falling asleep.
416
HMA v Cunningham 1963 JC 80 (internal factor); Ross v HMA 1991 JC 210 (external factor).
417
HMA v Cunningham 1963 JC 80. In MacLeod v Mathieson 1993 SCCR 488 the sheriff treated diabetes which caused hypoglycaemia as an external factor. However, he was not referred to Cunningham which, following Ross v HMA 1991 JC 210, remains a binding authority. Cunningham appears not to have been placed before the court in the two cases Stewart v Payne and McQuade v Clarke both reported at 2017 JC 155. In both cases the court found that the Crown had acted properly in not prosecuting the driver in question where the driver had lost consciousness due to their internal medical conditions (in Payne’s case a vasodepressor syncope syndrome; and in Clarke’s case a neuro-cardiogenic syncope or vasovagal syncope).
418
In practice the cases are often complex and sensitive, and involve weighing the driver’s medical condition against deaths or injuries to others. In these circumstances as in Stewart v Payne and McQuade v Clarke 2017 JC 155 prosecutors may prefer not to follow the distinction between external and internal factors. Nevertheless, the distinction is supported by binding case law. See HMA v Cunningham 1963 JC 80 read with Ross v HM Advocate 1990 JC 210.
419
Mental disorder is defined in the Criminal Procedure (Scotland) Act 1995, s 307(1), which in turn refers to the Mental Health (Care and Treatment) (Scotland) Act 2003, s 328(1).
420
Criminal Procedure (Scotland) Act 1995, s 57.
421
Ross v HM Advocate 1991 JC 210 at p 218; Stewart v Payne and McQuade v Clarke 2017 JC 155 at [83]; MacLeod v Mathieson 1993 SCCR 488 at p 492.
422
See the Analysis of Responses to CP2.
423
Road pricing is a generic term referring to charges for the use of roads, including motorway tolls and the London congestion charge. For further discussion, see CP2, paras 7.60 to 7.87.
424
Particular concerns were expressed about when a service was provided “for hire or reward”; the distinction between short-term hire and long-term leasing; and the possibility of peer-to-peer lending platforms. See Analysis of Responses to CP2, paras 5.8 to 5.43 and 5.92 to 5.101.
425
Of 74 respondents who answered Consultation Question 38, 58 (78%) agreed, 4 (5%) disagreed and 12 (16%) answered “other”. See Analysis of Responses to CP3, para I.38.
426
Out of 76 consultees who responded to Consultation Question 40, 60 (79%) agreed that a licensed operator should be subject to all of the duties, 6 (8%) respondents to some duties, while 9 (12%) answered “other”. One respondent, who opposed the deployment of NUIC vehicles altogether, said that operators should not be subject to any of the duties.
427
Society of Automotive Engineers International (SAE), J3016 Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles (April 2021) (SAE Taxonomy J3016), Table 2, p 28.
428
See, for example, responses from Waymo, Wayve and the IROHMS Simulation Laboratory. Further details are provided in the Analysis of Responses to CP3 at paras I.76 to I.78.
429
SAE Taxonomy J3016, para 3.23.
430
SAE Taxonomy J3016, para 3.23, Examples 1 and 2.
431
SAE Taxonomy J3016, para 3.13.
432
For further discussion, see Analysis of Responses to CP3, paras I.18 to I.25.
433
See Ch 3, paras 3.59 to 3.64.
434
The role appears similar to that of a “banksman” used on construction sites to direct vehicle movement on or around the site. The Health and Safety Executive stresses that banksmen must be trained and authorised: See https://www.hse.gov.uk/construction/faqs.htm. Banksmen should also use standard signals: Health and Safety (Signs and Signals) Regulations 1996 L64
435
N Reed, T Leiman, P Palade, M Martens and L Kester. “Ethics of automated vehicles: breaking traffic rules for road safety” (2021) 23 Ethics and Information Technology 777, https://doi.org/10.1007/s10676-021-09614-x.
436
Highway Act 1835, s 72 prohibits a person from driving “a carriage of any description” on a footpath by the side of the road which is “set apart for the use or accommodation of foot passengers”.
437
See Ch 8, para 8.20.
438
Human Factors in International Regulations for Automated Driving Systems group position paper submitted on 18 September 2020 to the UNECE Global Forum for Road Traffic Safety (WP1) at its 81st session, https://www.unece.org/fileadmin/DAM/trans/doc/2020/wp1/ECE-TRANS-WP1-SEPT-2020-Informal-8e..pdf (HF-IRADS position paper).
439
Latency means the time delay before a transfer of data begins following an instruction for its transfer.
440
J Davis, C Smyth and K McDowell, “The effects of time lag on driving performance and a possible mitigation” (2010) 26(3) IEEE Transactions on Robotics, 590 to 593.
441
HF-IRADS position paper, p 6.
442
HF-IRADS position paper, p 3.
443
HF-IRADS position paper, p 3.
444
The Civil Aviation Authority has established a Scheme for the Regulation of Air Traffic Controllers’ Hours (SRATCOH). This also sets out rules for the maximum hours in a shift and for the hours which can be worked in a 30-day period. Rest breaks are expected to provide a certain detachment from the operation eg rest areas and quiet spaces. (CAP 670 - ATS Safety requirement, D27). Air traffic controllers are also subject to strict drink and drugs laws: see Railways and Transport Safety Act 2003, ss 92 to 94.
445
The Railways and Other Guided Transport Systems (Safety) Regulations 2006 SI 2006/599, reg 23. The regulations implement the European Railway Safety Directive 2004/49/EC 2004 into domestic law.
446
Above, reg 24(1)(a).
447
Above, reg 25(1).
448
Office of Road and Rail, Managing Rail Staff Fatigue (January 2012), https://orr.gov.uk/__data/assets/pdf_file/0005/2867/managing_rail_fatigue.pdf, pp 44 to 47.
449
The time of writing is Autumn/Winter 2021. During this period, world leaders negotiated the COP26 agreement in Glasgow, the UK suffered fuel shortages and extreme weather conditions, and protestors blocked traffic on motorways. See https://www.bbc.co.uk/news/science-environment-56901261;
https://www.bbc.co.uk/news/explainers-58709456; https://www.bbc.co.uk/news/uk-england-59510639; https://www.bbc.co.uk/news/uk-58916326.
450
This would include the need to communicate with the full range of passengers, including those who are cognitively impaired or who have hearing loss. For further discussion, see Analysis of Responses to CP2, paras 6.84 to 6.90.
451
The Bill to amend transportation ordinance (no. 129) (self-driving vehicle and vehicle with conditional independence), 5741-2021, was published on 11 August 2021. Available at https://main.knesset.gov.il/Activity/Legislation/Laws/Pages/LawBill.aspx?t=lawsuggestionssearch&lawitemid =2161538. The Bill covers vehicles that meet SAE Level 4 criteria for deployment without safety drivers present in vehicles, to enable their use on public roads with paying passengers. The Bill also expands the authority currently given to the relevant regulator to exempt SAE Level 3 criteria from rules and regulations which in his opinion should not apply to SAE Level 3 vehicles. It is now being considered by the Knesset and is expected to be approved in early 2022. We would like to thank Avi Licht and his team at Meitar Law Offices for their help in analysing the draft bill which is only published in Hebrew.
452
See the Autonome Fahrzeug-Genehmigungs und Betriebsverordnung (AVGBV) Ordinance (10 June 2021) accompanying amendments to the Stra^enverkehrsgesetz (the German Road Traffic Act, StVG).
453
AFGBV, § 14(1).
454
AFGBV, Annex II, para 1.1
455
AFGBV, Annex II, para 1.2. They must also be reliable with a view to the fulfilment of their obligations under § 1f(2) of the StVG amendments: AFGBV, § 14(2).
456
Order 2021-443, Chapter III, Article 5; Article L3151-5 of the Transport Code (as inserted by Order 2021443).
457
Order 2021-443, Chapter III, Article 5.
458
Article L3151-3 of the Transport Code (as inserted by Order 2021-443).
459
For a summary of views put, see Analysis of Responses to CP3, paras I.80 to I.94.
460
P3 Mobility’s response was similar to Pinsent Masons’ on this point.
461
See the Uniform Automated Operation of Vehicles Act drafted by the National Conference of
Commissioners on Uniform State Laws in July 2019 at
https://www.uniformlaws.org/HigherLogic/System/DownloadDocumentFile.ashx?DocumentFileKey=a78d1a b0-fac8-9ea1-d8f2-a77612050e6e&forceDialog=0.
462
This included Mills & Reeve, Logistics UK, Pinsent Masons, Transport for West Midlands, the Office of the Traffic Commissioner and the BVRLA.
463
The task of installing software updates can be of varying complexity. Sometimes expertise may be required; in other instances the installation process may be simple enough for owners to undertake themselves. The safety case will need to account for this.
464
The place must be used by the general public, without objection by the landowner or occupier. For further discussion, see CP3 paras 2.3 to 2.5 and Appendix 2.
465
CP3, Consultation Question 38(3).
466
For a full discussion of responses, see Analysis of Responses to CP3 at para I.37.
467
See paras 9.132 to 9.139 below and Background Paper A.
468
See Analysis of Responses to CP3, Consultation Question 16 responses at para E.70.
469
For discussion of these requirements, see CP2 paras 4.55 to 4.73 and Analysis of Responses to CP2, paras
4.54 to 4.69.
470
The Senior Traffic Commissioner for Great Britain issues guidance and directions under section 4C(1) of the Public Passenger Vehicles Act 1981 (as amended) interpreting the law in relation to requirements to be of good repute or fitness: see https://www.gov.uk/government/publications/traffic-commissioners-good-repute-and-fitness-march-2019. Private hire operators must satisfy their licensing authority they are a “fit and proper person”: Local Government (Miscellaneous Provisions) Act 1976, s 55(1) and Private Hire Vehicles (London) Act 1998, s 3(3)(a).
471
Utopia Traction Ltd [2011] UKUT 357 (AAC); Silvertree Transport Ltd [2013] UKUT 0117 (AAC).
472
Paul Frederick Boomer T/A Carousel [2011] UKUT 86 (AAC) at [5]. A Phoenix company is created where the assets of one company are transferred to another legal entity with no obligation to pay the failed company’s debts.
473
Pemberton Transport Ltd [2010] UKUT 471 (AAC) at [9] to [10].
474
Any insurance against (for example) the cost of maintenance would be in addition to compulsory third party vehicle insurance under Road Traffic Act 1988, s 143 (which would be required in any event).
475
Goods Vehicles (Licensing of Operators) Act 1995, s 13A(2)(a); Public Passenger Vehicles Act 1981, s 14ZA(2)(a).
476
European Parliament and Council Regulation (EC) 1071/2009 (2009 Retained EU Regulation 2009/1071),
477
Retained EU Regulation 2009/1071, arts 2(7) and (9), and 5(a).
478
European Parliament and Council Regulation (EC) 1071/2009 (2009 Retained EU Regulation 2009/1071), art 5(b) and (c).
479
CP3, Consultation Question 39.
480
See for example the Civil Aviation Authority’s CAP 795: Safety Management Systems - Guidance to Organisations (2 February 2015), https://publicapps.caa.co.uk/modalapplication.aspx?appid=11&mode=detail&id=6616#:~:text=Reference%3 A%20CAP%20795%20Title%3A%20Safety%20Management%20Systems%20-,concepts%20to%20implement%20and%20maintain%20an%20effective%20SMS.
481
See Ch 6, paras 6.28 to 6.37. For further discussion, see CP3 paras 10.66 to 10.76 and L Fraade-Blanar and others, Measuring Automated Vehicle Safety: Forging a Framework (RAND Corporation, 2018), https://www.rand.org/pubs/research_reports/RR2662.html.
482
See International Telecommunication Union Focus Group on AI for Autonomous and Assisted Driving (FG-AI4AD) response to CP3, pp 8 - 12; and the United States Department for Transportation National Highway Traffic Safety Administration First Amended Standing General Order 2021-01: Incident Reporting for Automated Driving Systems (ADS) and Level 2 Advanced Driver Assistance Systems (ADAS) (issued on 29 June 2021, amended on 12 August 2021), available at: https://www.nhtsa.gov/sites/nhtsa.gov/files/2021-08/First_Amended_SGO_2021_01_Final.pdf; see also the Strassenverkehrsgesetz (the German Road Traffic Act, StVG), s 1g(1). In France, service organisers are required to submit annual reports, including information concerning safety; see French Transport Code, R3152-14.
483
Goods Vehicles (Licensing of Operators) Act 1995, ss 40 to 42 and sch 5 para 3. See also Road Traffic Act 1988, ss 68(1) and 77(1) and (3). The Consumer Rights Act 2015, sch 5 para 23 confers powers of entry for routine inspection on enforcers, provided that notice in writing is given to the occupier two days before the date of entry.
484
Public Passenger Vehicles Act 1981, s 15(2).
485
Gov.uk, “PSV (Public Service Vehicle) operator licences”: see https://www.gov.uk/psv-operator-licences/how-to-apply-for-a-psv-licence.
486
For the duration of private hire operator licences in England and Wales see the Local Government (Miscellaneous Provisions) Act 1976, s 55(2); in London see the Private Hire Vehicles (London) Act 1998, s 3(5). In Scotland, see the Civic Government (Scotland) Act 1982, sch 1 para 8.
487
Road Traffic Act 1988, s 143(1).
488
Road Traffic Act 1988, s 40A.
489
K McCormac, P Brown, P Veits, N Watson and J Woodhouse (eds), Wilkinson’s Road Traffic Offences (28th ed 2017), para 1.179.
490
In Leathley v Tatton [1980] RTR 21, the defendant was found guilty of driving without insurance when he helped a friend to take a vehicle without consent, by jump starting it and jumping into the passenger seat.
491
Cobb v Williams [1973] RTR 113.
492
Elliott v Grey [1960] 1 QB 367; Tudhope v Every 1976 JC 42 (in relation to the obligation to have adequate third party insurance); Pumbien v Vines [1996] RTR 37.
493
See Pumbien v Vines [1996] RTR 37 (above).
494
See Pumbien v Vines (above); and Tudhope v Every 1976 JC 42. In these cases the courts took divergent approaches in relation to whether the owner of an immobilised vehicle abandoned on the road was a user who required to have an MoT test certificate.
495
[2019] UKSC 16
496
Above at [34].
497
For example, The Traffic Management Act 2004, s 72, provides that the owner of the vehicle is legally liable for a penalty charge. The registered keeper is presumed to be the owner unless proven otherwise.
498
CP3, paras 13.127 to 13.133.
499
AXA UK, ALBUM, Bar Council, Burges Salmon, Cycling UK, DAC Beachcroft, FirstGroup plc, HORIBA MIRA, John Rainbird, Nova Modus, Office of the Traffic Commissioner (OTC), Oxfordshire County Council, Pinsent Masons, P3 Mobility, Shoosmiths, Stagecoach Group plc, and Suzy Lamplugh Trust.
500
ALBUM; the Association of British Insurers and Thatcham Research, Richard Birch, and the British Motorcyclists Federation. The Faculty of Advocates suggested that the DVSA should operate the scheme “on behalf of the Traffic Commissioners”.
501
Amey, the Association of British Insurers and Thatcham Research, Richard Birch, and the British insurance Brokers’ Association (BIBA).
502
Highways England, Transport for Greater Manchester, and Xinyi Wu.
503
Traffic Commissioners for Great Britain, Service Level Agreement for the Provision of Support Services to the Traffic Commissioners of Great Britain by the Driver and Vehicle Standards Agency (March 2021), https://assets.publishing.service.gov.uk/government/uploads/system/uploads/attachment_data/file/1004156/ Service_Level_Agreement.pdf, para 2.1
504
The Road Vehicles (Construction and Use) Regulations 1986, reg 104.
505
Public Passenger Vehicle Act 1981, s 81.
506
Public Passenger Vehicles Act 1981, s 1.
507
For a discussion of the complex case law on this issue, see Background Paper B.
508
Civic Government (Scotland) Act 1982, s 23(1).
509
Town and Police Clauses Act 1847, s 45.
510
If the service falls within the description of the regulated activity, such as inviting or accepting bookings (private hire operators) or plying for hire, but is not eligible for a licence (because that requires a driver).
511
If the service falls outside the description of the regulated activity altogether, then it cannot be stopped.
512
For discussion, see Analysis of Responses to CP2, paras 4.123 to 4.125.
513
Analysis of Responses to CP2, para 4.129 to 4.134.
514
HM Government, Taxi and Private Hire Vehicle Licensing: Protecting Users - Statutory Guidance for Licensing Authorities (February 2019) para 2.107, as discussed in CP2, para 4.122.
515
“Disabled people, who currently make up 14 per cent of London’s population, on average make one third fewer trips than non-disabled Londoners”, Mayor of London, Mayor’s Transport Strategy (2018), p 25.
516
In 2019, in England, adults with mobility difficulties made an average of 21 trips per person per year in taxis or private hire vehicles, compared to 11 such trips for the general population: DfT, Taxi and Private Hire Statistics 2021 (30 June 2021), p 14.
517
Analysis of Responses to CP2, para 6.100.
518
CP2, paras 6.43 to 6.49.
519
The Rail Safety and Standards Board’s (RSSB) dedicated webpage for Platform Train Interface (PTI) issues indicates that PTI issues account for 48% of the total passenger fatality risk on the mainline railway network: https://www.rssb.co.uk/what-we-do/key-industry-topics/platform-train-interface#section-3.
520
In 1654, for example, the number of hackney carriages in London was limited to 300 following complaints of congestion: see CH Firth and R S Rait (ed), Acts and Ordinances of the Interregnum, 1642-1660 (1911), pp 922-924.
521
Young women in particular can be left vulnerable if they are unable to book a ride home after a night out. For a full discussion, see CP2, paras 7.88 to 7.119.
522
We note that the relevant regulator has the authority to extend the validity of the operating permit for an extra three years at a time as long as the rationales for the trial are still relevant. See proposed section 14DD of the bill to amend the transportation ordinance (no. 129) (self-driving vehicle and vehicle with conditional independence), 5741-2021.
523
It appears from the Explanatory Memorandum to the Bill that taxi regulation will apply to AVs. The Explanatory Memorandum states that an autonomous vehicle shall, as a rule, be operated in accordance with the provisions of the Ordinance - both with respect to the rules of conduct on the road and with respect to regulation of the service that the Operating Permit Holder will provide. We also note that proposed section 14HH(b) gives the National Supervisor the authority to exclude various provisions including those relating to the operation of a taxi. This shows that in the absence of such exclusion, the relevant taxi provisions will apply.
524
The amendments to the German Stra^enverkehrsgesetz (StVG - Road Traffic Act), the “Gesetz zur Anderung des Stra^enverkehrsgesetzes und des Pflichtversicherungsgesetzes - Gesetz zum autonomen Fahren“ that came into force 28 July 2021 and accompanying draft Ordinance, the “Autonome Fahrzeug-Genehmigungs- und Betriebsverordnung” (“AFGBV” or “the Ordinance”), published on 15 June 2021.
525
French Ministry of Ecological Transition, Order 2021-443 relating to the criminal liability regime applicable to vehicles with automated driving.
526
See the work of the European Commission’s expert Motor Vehicle Working Group -Automated/Connected Vehicle subgroup (MVWG-ACV subgroup) to enable the deployment of urban shuttles and robotaxis available at https://circabc.europa.eu/ui/group/4273d650-b8a9-4093-ac03-18854fbba4b5/library/9ccccc66-3fcd-4536-a643-39c06559439a?p=1&n=10&sort=modified_DESC.
527
The French Mobility Law refers to the “service organiser” as the body responsible for deciding whether or not to commission the automated road transport system. For public passenger transport it specifies the service organiser may be the local authority. See Article L3151-1.I of the Transport Code (inserted by Article 5 of the draft decree implementing Order 2021-443 dated 14th April 2021, issued by the French Ministry of Ecological Transition).
528
The Federal Motor Transport Authority and responsible local authority both have powers in respect of evaluating manufacturers’ risk assessments and approving and monitoring the defined operational area. See StVG, §1f (3).
529
The position in Scotland differs to that in England and Wales. For further discussion, see Background Paper B, paras 1.19 to 1.21.
530
https://www.gov.uk/government/collections/taxi-statistics.
531
For a discussion of the law on taxis and private hire vehicles operating across licensing authority boundaries, see CP2, paras 3.27 to 3.35.
532
Scotland Act 1998, sch 5, Head E1, para (b) and Government of Wales Act 2006, sch 7A, Head E1, para 113.
533
Scotland Act 1998, s 28(8); Government of Wales Act 2006, s 107(6).
534
See paras 10.59 to 10.63 below.
535
See CP2, paras 8.42 to 8.53.
536
CP2, paras 8.6 to 8.77. Since CP2 was published, the Transport (Scotland) Act 2019 has been passed by the Scottish Parliament. The Act permits local transport authorities to operate bus services themselves or under a franchising model. It also introduces a scheme for “bus services improvement partnerships”.
537
In Wales, the Bus Services (Wales) Bill was introduced into the Senedd in March 2020, to make similar provisions. However, the Bill was withdrawn in July 2020, following difficult decisions about coronavirus priorities: see https://gov.wales/welsh-government-introduced-over-50-laws-deal-coronavirus.
538
For further details, see CP2, paras 8.54 to 8.61.
539
Transport Act 2000, s 155.
540
For further details, see CP2, paras 8.30 to 8.33.
541
Bus legislation only applies to public service vehicles, so would not apply to services operating interim passenger permits directly. We are therefore including some equivalent provisions for bus-like services.
542
Transport Act 1985, s 2.
543
This follows the CP2 proposal, discussed in CP2 at paras 8.84 to 8.91.
544
See Rec 50 at para 9.87.
545
See Rec 56 at para 9.120.
546
As noted above, no fundamental redesign is required where passenger services are provided with a user-in-charge. For such services, existing regulation of professional drivers can be applied to the user-in-charge.
547
See Uber’s response to CP3 in particular.
548
For example, a vehicle could function in self-driving mode with a user-in-charge in some Operational Design Domains (ODDs) (for example motorways), with no user-in-charge in others (for example, certain parking lots), and indeed not be operated in self-driving mode at all in other ODDs, such as country roads; or at night. The same vehicle and service may therefore be subject to existing regulatory regimes for some parts of a journey.
549
For example, under the HSW Act 1974, s 3, every employer must “conduct his undertaking in such a way as to ensure, so far as is reasonably practicable, that persons not in his employment who may be affected thereby are not thereby exposed to risks to their health or safety”. Breach of this duty is an offence under the HSW Act 1974, s 33. For more details of all the offences reviewed see CP3, paras 14.22 to 14.55 and Appendix 3.
550
CP3, paras 14.56 to 14.78.
551
CP3, para 14.108.
552
Of the 73 respondents who answered this question, 49 (67%) agreed, 23 (32%) answered “other” and one disagreed.
553
Out of 67 consultees who provided views, 50 (75%) fully supported such a duty. Only three consultees (SMMT, Mills & Reeve and Burges Salmon) disagreed outright.
554
Public Passenger Vehicles Act 1981, s 66. Under s 65 it is also an offence to forge or misuse certain documents in an application for a PSV operator’s licence, with an intention to deceive. Similar offences apply to HGV operator licences: see Goods Vehicles (Licensing of Operators) Act 1995, ss 38 and 39.
555
Public Passenger Vehicles Act 1981, s 74(1).
556
Under the latest German “Level 4” ordinance the holder of the vehicle must carry out a comprehensive check of the vehicle every 90 days and send the results to the Federal Motor Transport Authority: Autonome Fahrzeug-Genehmigungs- und Betriebsverordnung (“AFGBV”), § 13(1).
557
As discussed in Ch 4, we now think that it is preferable to focus on the safety of the vehicle as a whole, rather than distinguishing between the ADS and other systems within the vehicle.
558
SI 2012 No 1916.
559
Under the HSW Act 1974, s 40, the onus is similarly on the defendant to show that it was not reasonably practicable to do more to ensure safety. This was held to comply with Art 6(2) of the European Convention of Human Rights in Davies v HSE [2002] EWCA 2949.
560
See Gibson v Barton (1874-75) LR 10 QB 329 at 336; Re B Johnson & Co (Builders) Ltd [1955] Ch 634; and Registrar of Restrictive Trading Agreements v W H Smith & Son Ltd and others [1969] 1 WLR 1460.
561
Where there is no board, the courts have adapted these words to apply to other corporate structures. For example, “charity trustees” are defined in the Charities Act 2011, s 177 as persons who have general control and management of the administration of a charity. In Bhamani v Sattar [2021] EWCA Civ 243 at [39], by Nugee LJ it was held that members of a Management Committee who did not sit on the board of trustees were nonetheless “charity trustees” for this purpose on the grounds that there were a number of powers vested in them.
562
Insurance Act 2015, s 4(8)(c).
563
See, for example, the Fraud Act 2006, s 12.
564
Corporate Criminal Liability: A discussion paper (2021) Law Commission Consultation Paper.
565
Huckerby v Elliott [1970] 1 All ER 189, p 194.
566
Corporate Criminal Liability: A discussion paper (2021) Law Commission Consultation Paper para 8.10.
567
CP3, para 14.98.
568
California Code of Regulations, Autonomous Vehicle Regulations, §228.06(a).
569
California Code of Regulations, Autonomous Vehicle Regulations, §228.06. For further information, see CP3, paras 7.46 - 7.49.
570
California Code of Regulations, Autonomous Vehicle Regulations.
571
These included the Association of Local Bus Managers (ALBUM), HORIBA MIRA, Dean Hatton of the National Police Chiefs’ Council, ABI and Thatcham, Kennedys Law LLP and the Senators of the College of Justice.
572
CP3, para 14.99.
573
There are six offences of causing death - by dangerous driving (Road Traffic Act 1988 (“RTA 1988”), s 1); by careless or inconsiderate driving (RTA 1988, s 2B); by careless driving under the influence of drink or drugs (RTA 1988, s 3A); or while uninsured, unlicensed or disqualified (RTA 1988 ss 3ZB(a) and 3ZC). There are two offences of causing serious injury - by dangerous driving (RTA 1988, s 1A) and driving while disqualified (RTA 1988, s 3ZD). There is also an offence of “aggravated vehicle taking” under the Theft Act 1968, s 12A in England and Wales, which may be aggravated in various ways, including by death or injury.
574
See for example, Sentencing Advisory Panel, Attitudes to the sentencing of offences involving death by driving (2008) Research Report 5, and Ministry of Justice, Response to the consultation on driving offences and penalties relating to causing death or serious injury (October 2017), https://consult.justice.gov.uk/digital-communications/driving-offences-causing-death-or-serious-injury/results/consultation-response-on-driving-offences.pdf.
575
The Police, Crime, Sentencing and Courts Bill 2021: see https://bills.parliament.uk/bills/2839.
576
See para 4.37.
577
In Scotland, the ASDE might face a charge of corporate homicide, while senior managers might face a charge of culpable homicide: for more details see CP 3, Annex 4.
578
Corporate Manslaughter and Corporate Homicide Act 2007 (there have been no prosecutions under the Act in Scotland) or Transco plc v HM Advocate [2004 JC 29] at common law. See CP3, Annex 3.
579
Insurance Act 2015, s 3.
580
National Liaison Committee for the Work-related deaths protocol (England and Wales), Work-related Deaths: A protocol for liaison (England and Wales) (February 2016), https://www.hse.gov.uk/pubns/wrdp1.pdf. The signatories to the protocol are the National Police Chiefs’ Council, the British Transport Police, the Care Quality Commission, the Care and Social Services Inspectorate Wales, the Chief Fire Officers’ Association, the Crown Prosecution Service, the Health and Safety Executive, the Healthcare Inspectorate Wales, the Local Government Association, the Maritime and Coastguard Agency, the Medicines and Healthcare Products Regulatory Authority: Medical Devices Division, the Office for Nuclear Regulation, the Office of Rail and Road and the Welsh Local Government Association. For further information see https://www.hse.gov.uk/enforce/enforcementguide/wrdeaths/investigation.htm#P4_750.
In Scotland, a protocol for the investigation of work-related deaths has been agreed between the Health and Safety Executive, the Association of Chief Police Officers (Scotland), the British Transport Police and the Crown Office and Procurator Fiscal Service: Work-related deaths: A protocol for liaison (Scotland) (September 2006), https://www.hse.gov.uk/scotland/workreldeaths.pdf.
581
The Human Medicines Regulations SI 2012 No 1916, reg 99.
582
The Police, Crime, Sentencing and Courts Bill 2021, cl 65 (Bill 133 2021-22) (as amended in Public Bill Committee) 24 June 2021: see https://bills.parliament.uk/bills/2839/publications.
583
Computer Misuse Act 1990, s 1.
584
Under Computer Misuse Act 1990, s 3ZA(7), an unauthorised act in relation to a computer creating a risk of serious damage to human welfare by disruption of facilities for transport is punishable by a maximum sentence of life imprisonment.
585
Contrary to Road Traffic Act 1988, s 3.
586
Under Road Traffic Act 1988, s 3ZA(4), “a person is to be regarded as driving without reasonable consideration for other persons only if those persons are inconvenienced by his driving”.
587
Criminal damage can be temporary and reversible, and includes putting water-soluble paint on a pavement: Hardman v Chief Constable of Avon and Somerset [1986] Crim LR 330. On the other hand, spit on a raincoat was not criminal damage as it was so easily removed; the coat had not been rendered imperfect or inoperative: A (A Juvenile) v R [1978] Crim LR 689. The issue is a matter of fact and degree, as determined by a court: Roe v Kingerlee [1986] Crim LR 735 (DC).
588
JS (A Child) v DPP [2017] 4 WLR 102 at 14.
589
See CP1, para 8.30.
590
See CP3, para 15.10.
591
DAC Beachcroft, Burges Salmon, AXA UK, SMMT and Suzy Lamplugh Trust.
592
Association of British Insurers (ABI) and Thatcham, Bar Council, Aviva Insurance, Momentum Transport Consultancy, AXA UK, Kennedys Law, Mills & Reeve, DAC Beachcroft, Office of the Traffic Commissioner, Pinsent Masons, Society of Motor Manufacturers and Traders (SMMT), Faculty of Advocates and Cycling UK.
593
British Motorcyclists Federation, ABI and Thatcham, Aviva Insurance, and Faculty of Advocates.
594
As noted in CP1, paras 8.49 to 8.55.
595
See CP3, para 15.9.
596
Analysis of Responses to CP3, Consultation Question 47 responses at para K.5.
597
FirstGroup, ITS United Kingdom, Nova Modus, Trustworthy Autonomous Systems Hub, Office of the Traffic Commissioner, Burges Salmon, and Highways England.
598
In England and Wales, under Criminal Damage Act 1971, s 1(1); and in Scotland at common law.
599
Theft Act 1968, s 1(1). In Scotland, intent permanently to deprive is not required: Black v Carmichael 1992 SLT 897.
600
Wilkinson’s Road Traffic Offences (28th ed 2017) para 15-06.
601
Theft Act 1968, s 12(7).
602
Kivlin v Milne 1974 SLT (Notes) 2.
603
G H Gordon, The Criminal Law of Scotland, Volume II (4th edn by J Chalmers and F Leverick, 2016), paras
21.46 to 21.50.
604
Road Traffic Act 1988, s 22A(2).
605
Road Traffic Act 1988, s 22A(3).
606
The Laser Misuse (Vehicles) Act 2018 creates a new offence of “shinning or directing a laser beam towards a vehicle”. Although the Act was motivated by concerns about lasers being shone at aircraft, it covers a wide variety of vehicles, including trains, ships and motor vehicles (s 1(6)). However, the offence only applies if the laser beam “dazzles or distracts, or is likely to dazzle or distract, a person with control of the vehicle” (s 1(1)(b), emphasis added). This means that it would not apply to an automated vehicle without a person in control.
607
Also known as reckless endangerment to the lieges.
608
HM Advocate v Harris 1993 JC 150 at 153F-G, 155H-I, and 162G; Cameron v Maguire 1999 JC 63 at 65D to 66A (discharge of rifle few metres from dwellinghouses).
609
HM Advocate v Harris 1993 JC 150; Smith and M'Neill (1842) 1 Broun 240 p 244, per Lord Justice-Clerk Hope; and Robertson v Klos 2006 SCCR 52 (speeding at 158 miles per hour while holding mobile phone).
610
1983 SLT (Sh Ct) 37.
611
(whose knowledge included that of the person interfering), see Road Traffic Act 1988, s 22A(2).
612
Hansard HC Deb 10 Dec 1990, col 687 (the Minister (Malcolm Rifkind QC) referred to the common law offence of malicious mischief which would cover objects on or over a road that caused damage to property, but the offence of culpable and reckless conduct would cover the other types of conduct covered by section 22A).
613
CP3, paragraphs 15.4 and 15.27.
614
CP3, paras 15.57 to 15.58.
615
Out of the 87 consultees who responded, 62 (71%) agreed, 10 (11%) disagreed and 15 said ‘other’ -Analysis of Responses to CP1 at para 7.143.
616
See Analysis of Responses to CP1, para 7.144.
617
In R v Meeking [2012] EWCA Crim 641 a defendant was found guilty of unlawful act manslaughter following a breach of section 22A, where her interference caused a death. However, the case has been criticised on the grounds that section 22A is essentially a crime of negligence rather than intention or recklessness, which is insufficient to be an unlawful act for these purposes. Instead, gross negligence manslaughter would have been more appropriate. For discussion, see CP1 paras 7.102 to 7.103; A Ashworth, “Case Comment” [2013] Criminal Law Review 333 and D Ormerod and K Laird, Smith, Hogan and Ormerod’s Criminal Law (15th ed 2018) p 575.
618
For discussion about the boundaries of gross negligence manslaughter, see CP3 paras 15.38 to 15.41 and K Laird “The evolution of gross negligence manslaughter” (2018) 1 Archbold Review 6.
619
HM Advocate v Harris 1993 JC 150 at 165C, by Lord Prosser.
620
McDowall v HM Advocate 1998 JC 194 at 197 and 198; and HM Advocate v Purcell 2007 SCCR 520.
621
91% of consultees agreed that the aggravated offence should apply in both England and Wales and in Scotland (emphasis added). No respondents answered ‘In England and Wales only’ or ‘In Scotland only’ in response to this consultation question. We have therefore assumed that support for aggravated offence in England and Wales would subsist amongst consultees, even without the extension of the offence to Scotland.
622
DAC Beachcroft, Pinsent Masons, and Burges Salmon.
623
Craig Broadbent and Henry Carter.
624
See CP3, para 15.60.
625
ALBUM, Zurich Insurance, Logistics UK, First Group, George Economides (Oxfordshire County Council), Richard Birch (Acromas Insurance Company), ABI and Thatcham, Cycling UK, BIBA, Mills & Reeve, Direct Line Group, Pinsent Masons, Aviva Insurance, Trustworthy Autonomous Systems Hub, Transport for Greater Manchester and John Rainbird.
626
Senators of the College of Justice, Nova Modus, Bar Council, DAC Beachcroft, Trustworthy Autonomous Systems Hub, Horiba Mira, and BLM Law.
627
For example, Road Traffic Act 1988, s 40A.
628
The Automated and Electric Vehicles Act 2018 (AEV Act), s 2(3) sets out the meaning of "damage" for the purposes of the Act. It covers death, personal injury and most types of property damage. However, it does not cover damage to the AV itself nor pure economic loss.
629
Road Traffic Act 1988 (RTA 1988), s 145(3). There are exceptions for vehicles owned by the Crown and other public bodies (Road Traffic Act 1988, s 144(2)). Under s 144A, it is also an offence to keep a vehicle which does not meet the insurance requirements.
630
AEV Act, sch 1, para 19(2) amends s 145 of the RTA 1988. It provides that the policy required by s 145 “must also provide for the insurer’s obligations to the insured person under s 2(1)” of the AEV Act 2018.
631
An “insured person”, in relation to an insured vehicle, means any person whose use of the vehicle is covered by the policy in question: AEV Act 2018, s 8(2).
632
AEV Act, s 3(2).
633
AEV Act, s 4(1)(b). Under s 4(1)(a), the policy may also exclude liability where the accident was the direct result of prohibited software alterations “made by the insured person, or with the insured person’s knowledge”.
634
Section 5 of the AEV Act suggests that a secondary claim can only be brought by the insurer against a third party once the injured party’s claim is settled. However, it is possible that, under Scots law (Court of Session rule 26.1(1)(a) or (b)(ii) as interpreted by Findlay v NCB 1965 SLT 328 at 330 - 221) and English law (Civil Liability (Contribution) Act 1978, s 1), an insurer could bring a third party into an existing claim using a third party notice.
635
AEV Act, s 5(1) states that “any other person liable to the injured party in respect of the accident is under the same liability to the insurer or vehicle owner”.
636
CP1, paras 6.31 to 6.39.
637
AEV Act, s 3(1).
638
AEV Act, s 6(3).
639
For discussion, see CP1, paras 6.40 to 6.46, and CP3, paras 16.15 to 16.23.
640
Analysis of Responses to CP1, para 6.24.
641
Out of 58 respondents who answered this question, 38 (66%) agreed, 5 (9%) disagreed and 15 (26%) gave other responses.
642
Response from Stewarts Law. Full responses to Consultation Question 52 can be seen in the Analysis of Responses to CP3 at para L.6.
643
CP1 Analysis of Responses, para 6.133.
644
AEV Act, s 5.
645
CP1, paras 6.70 to 6.75.
646
A producer has a complete defence if it can show that the state of scientific and technical knowledge at the time when it put the product into circulation was not such as to enable the existence of a defect to be discovered: Product Liability Directive 85/374/EEC, Official Journal L 210 of 7.8.1985 pp 29 to 33, art 7(e) and Consumer Protection Act 1987, s 4(1)(e).
647
A claim for damages under Part I of the Consumer Protection Act 1987 cannot be brought more than 10 years after the last date on which the product in question was put into circulation; Consumer Protection Act 1987, Schedule 1(1); Limitation Act 1980, s 11A(3).
648
European Commission Expert Group on Liability and New Technologies - New Technologies formation, Liability for Artificial Intelligence and other emerging digital technologies (November 2019); CP3, paras 16.40 to 16.43.
649
European Commission Expert Group on Liability and New Technologies - New Technologies formation, Liability for Artificial Intelligence and other emerging digital technologies (November 2019), p 27.
650
These problems have been raised in response to the Law Commission’s consultation ahead of its 14th Programme of law reform.
651
CP1, paras 6.115 to 6.116.
652
If the in-use safety regulator finds the vehicle is in breach of requirements and imposes a fine on the ASDE for example, this would not be determinative of civil liability, but would be highly influential. See our discussion in CP1 of Wilkes v DePui [2016] EWHC 3096 (QB) at paras 6.78 to 6.87.
653
CP1, paras 6.115 to 6.116.
654
Of 60 respondents who answered this question, 42 (70%) agreed, 3 (5%) disagreed, and 15 (25%) gave other responses. For further discussion, see Analysis of Responses to CP3 at para L.31.
655
AEV Act, s 2(1)(b).
656
AEV Act, s 2(2). This applies to vehicles owned by public bodies, which effectively self-insure.
657
Road Traffic Act 1988, s 143(1)(a).
658
The MIB Untraced Drivers Agreement (2017) refers to a “person alleged to be liable” (para 3).
659
The user-in-charge may retain some incentive to become involved. Under s 2(3)(a) and (b) of the AEV Act, the insurer under the AEV Act is not liable for damage to the AV itself or goods carried on board. The userin-charge may wish to make a claim under their first party insurance against another party for any damage to their vehicle or goods.
660
Analysis of Responses to CP1, para 6.63.
661
CP1, Consultation Question 17(3)(a) and paras 6.52 to 6.59.
662
UN Regulation 157 on uniform provisions concerning the approval of vehicles with regard to Automated Lane Keeping Systems E/ECE/TRANS/505/Rev.3/Add.156 (ALKS Regulation). For further discussion, see CP3, paras 17.20 to 17.26.
663
See Analysis of Responses to CP3, Consultation Question 57 responses at para M.61.
664
We note the European Union has asked for location data in draft Regulation for vehicles fitted with ADSs. See the draft Commission Implementing Regulation (EU) and its annexes laying down rules for the application of the Revised General Safety Regulation 2019/2144, due to come into force on 6 July 2022. The MVWG-ACV sub-group’s draft Annex II of the Implementing Regulation, section 10 includes “position (GPS coordinates)” among the data elements that must be recorded in a clearly identifiable way by the data recorder of vehicles fitted with Automated Driving Systems (ADS). Available at https://circabc.europa.eu/ui/group/4273d650-b8a9-4093-ac03-18854fbba4b5/library/9ccccc66-3fcd-4536-a643-39c06559439a?p=1&n=10&sort=modified_DESC
665
For a discussion of concerns about the need for more information, see Ch 2, paras 2.99 to 2.108.
666
Under Financial Conduct Authority rules, insurers are expected to assemble evidence relating to a claim and make a reasoned reply as to whether they accept or deny liability: ICOBS 8.2.6 (available at https://www.handbook.fca.org.uk/handbook/ICOBS/8/2.html). On this basis, we think that three months is adequate for an insurer to request and identify the data necessary for their claim.
667
This is consistent with the use of neutral servers as advocated by European Automobile Manufacturers’ Association (ACEA). See https://www.cardatafacts.eu/neutral-server-vehicle-data/.
668
ALKS Regulation, n to para 8.4.1.
669
Article 4(7) of the GDPR defines a ‘data controller’ as a person who determines the purpose and means of the processing of personal data.
670
Out of 80 respondents who answered this question, 63 (79%) agreed, 5 (6%) disagreed and 12 (15%) gave other responses. See Analysis of Responses to CP3, Consultation Question 56 responses at para M.44.
671
Analysis of Responses to CP3, para M.54.
672
For example, if there was a dispute between the ASDE and insurer about what data was required, the insurer could apply for an injunction to prevent destruction of the data pending resolution.
673
Digital Economy Act 1971, s 43.
674
https://www.parliament.uk/business/committees/committees-a-z/commons-select/transport-committee/inquiries/parliament-2017/mobility-as-a-service-17-19/
675
See SAE’s Taxonomy and definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles, describing six levels of automation, http://standards.sae.org/j3016_201609/
676
SI 2008 No 1277, sch 1, para 2. This is a criminal offence under Reg 12.
677
See reg 2(2), and Case C-210/96 Gut Springenheide GmbH, Rudolf Tusky v Oberkreisdirektor des Kreises
Steinfurt-Amt fur Lebensmitteluberwachung and Another [1998] ECR I-4657.
678
See Care UK v Competition and Markets Authority (23 July 2021) EWHC (unreported) where Lady Justice Bacon took a narrow view of a “transactional decision”.
679
Consumer Protection from Unfair Trading Regulations 2008 (CPRs) (SI 2008 No 1277), reg 2(1).
680
Trade Descriptions Act 1968, s 12.
681
Case C-210/96 Gut Springenheide GmbH, Rudolf Tusky v Oberkreisdirektor des Kreises Steinfurt-Amt fur Lebensmitteluberwachung and Another [1998] ECR I-4657.
682
The General Product Safety Regulations 2005 (GPSR) (SI 2005 No 1803), reg 5.
683
Or £20,000 fine: GPSR, reg 20(1).
684
GPSR, reg 29.
685
Above, reg 2.
686
Above, reg 2.
687
GPSR, reg 7.
688
Above, reg 20(2).
689
The level 5 maximum is unlimited for offences committed after 12 March 2015: Sentencing Act 2020, s 122(3).
BAILII:
Copyright Policy |
Disclaimers |
Privacy Policy |
Feedback |
Donate to BAILII
URL: http://www.bailii.org/ew/other/EWLC/2022/LC404.html
